Inspiration
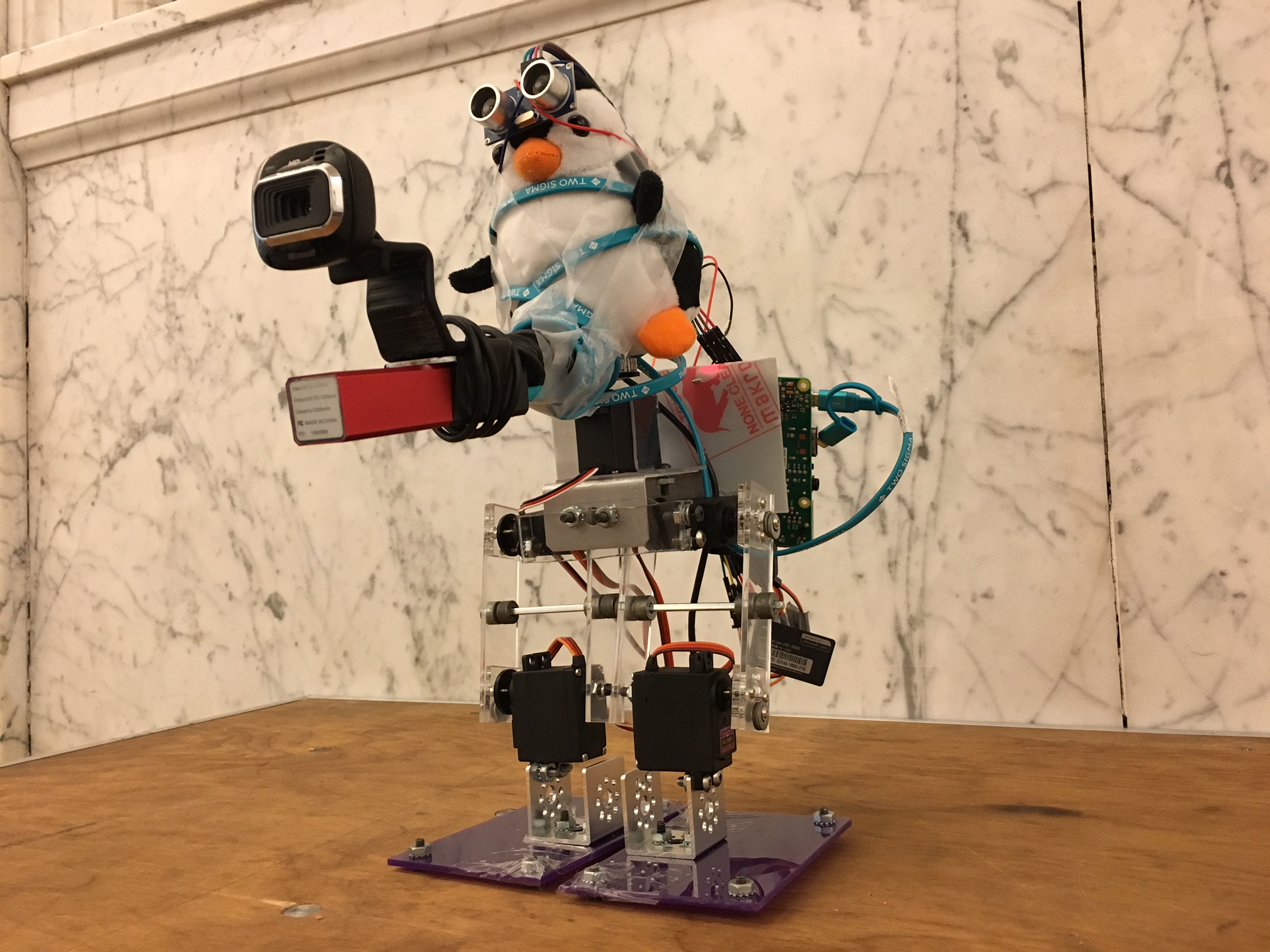
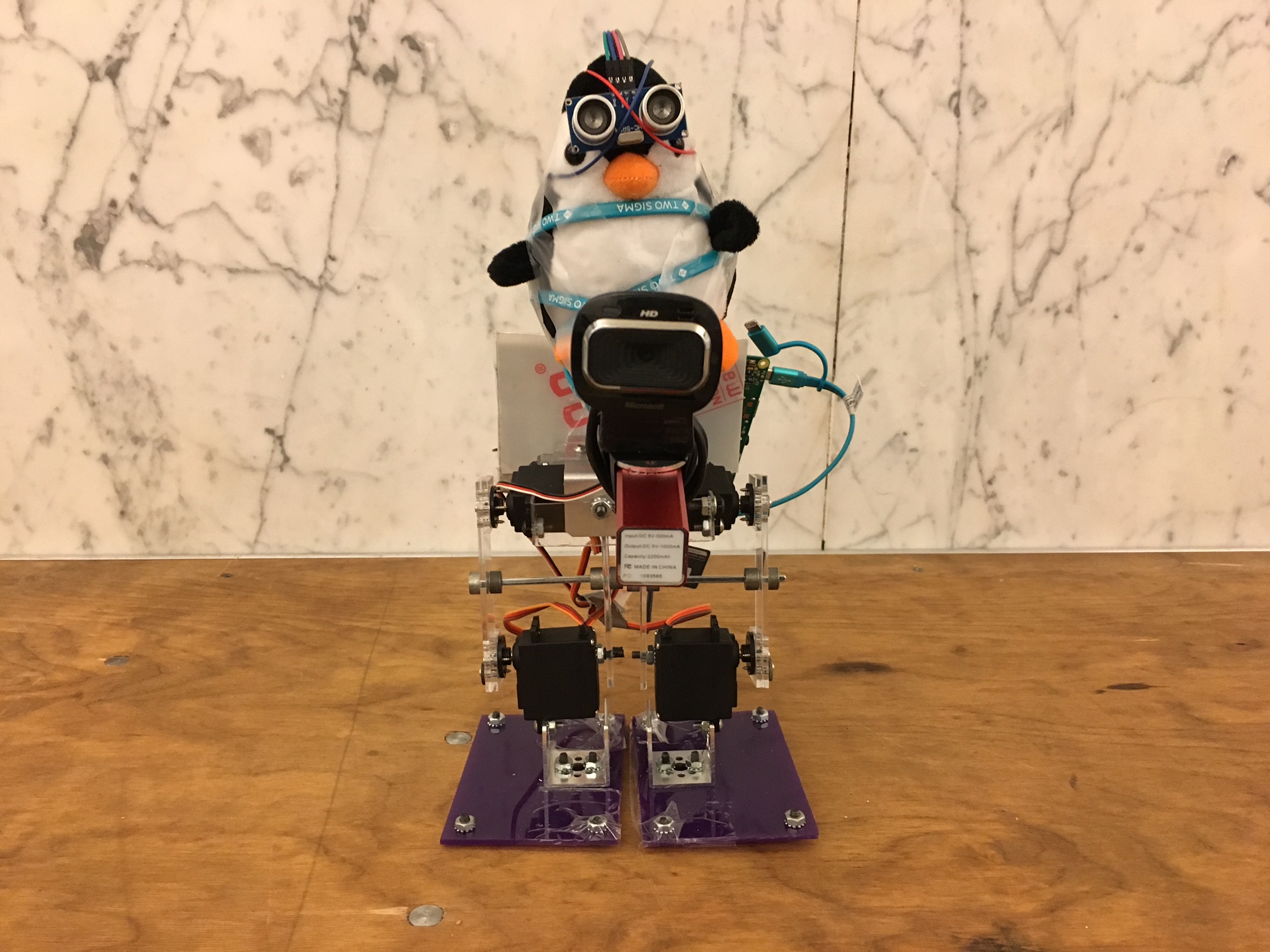
PennApps iconic Penguin. Hackers meet Makers. Crossbreed human+penguin+robot
What it does
Mimic human walk, detect obstacles and faces. It has potential of doing dangerous tasks and execute stuff on its path (i.e even more dangerous than rm -rf / )
How we built it
- Hardware hacking, mechanical engineering, Raspberry Pi 2, Python, Linux, Arduino, Sensors, Electronics, OpenCV, PWM, Laser cutting
- Creative juices flowing
- Love for PennApps
- Making, tinkering, and hacking tech :)
Challenges we ran into
- It's challenging to control various servos to mimic human walking. All servos have different angles and frame of references.
- We control servos using Raspberry Pi PWM which does not have support for speed adjustment. However, we were able to figure out a clever trick to do so :D
- Unstable Network. We remote control raspberry pi via VNC and the network occasionally dropped.
- Materials: Flying from the Colorado School of Mines, we were not able to bring much power tools and hardware materials (prohibited by TSA on plane). However, with some creative thinking, we utilized all available resources.
Accomplishments that we're proud of
- A penguin robot that can walk like human, detect obstacle using ultrasonic sensors, and detect human faces using webcam+OpenCV.
- Designed and Built a working robot with few materials and power tools.
What we learned
- Laser cutting, hardware hacking, mechanical design, electronics+power management, raspberry pi, computer vision, appreciation for human movement (coding the robot to walk is so challenging!!!)
What's next for Intelligent Biped Penguin Robot
- Make the walking process smoother. Include more sensors+equipments :) We will bring this penguin robot to elementary+middle schools nearby (which we usually volunteer and mentor) to do some demos and hopefully spark some youngsters' interest in robotics :)



Log in or sign up for Devpost to join the conversation.