-

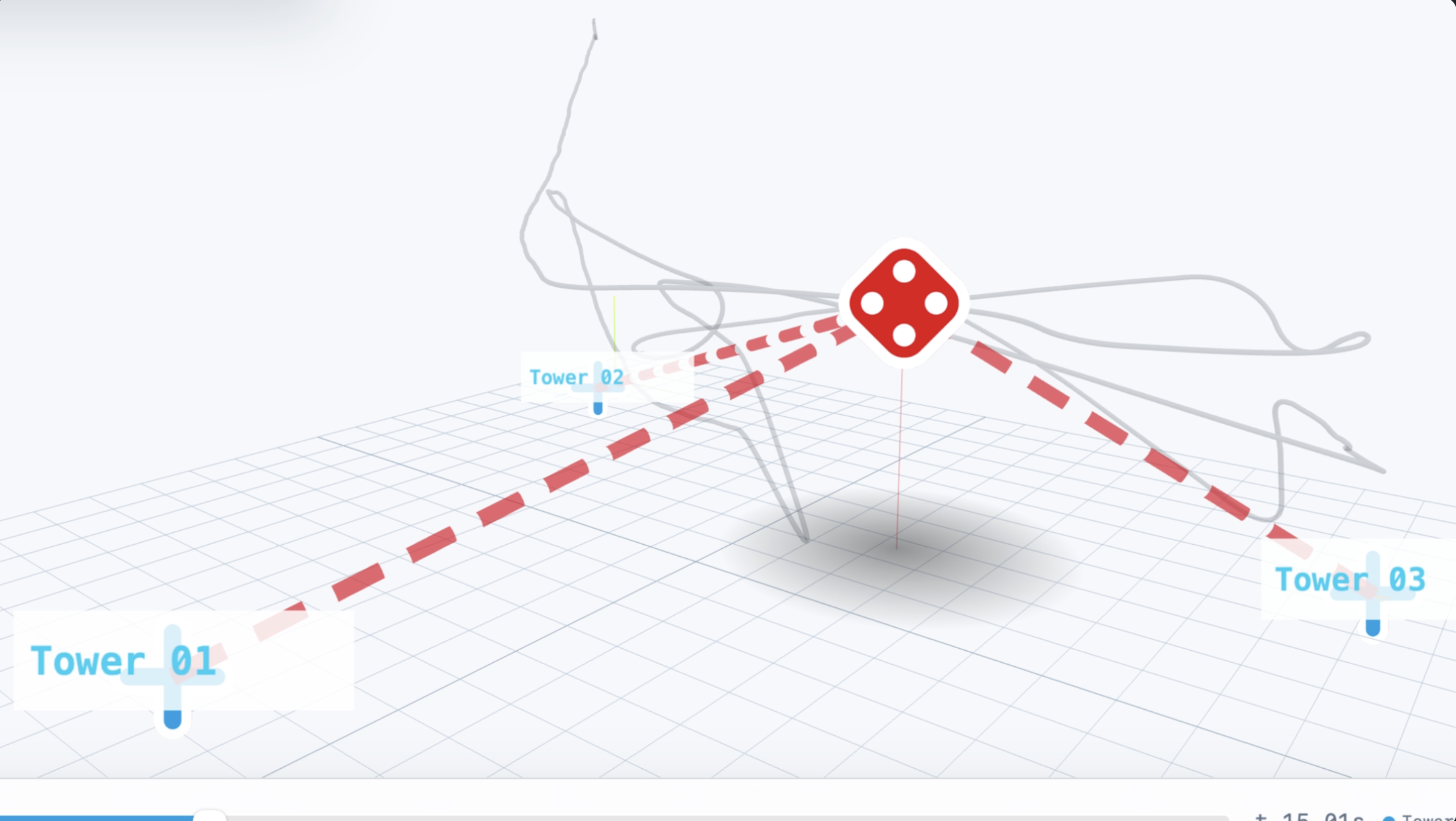
Triangulation recording: Perspective of tower
-
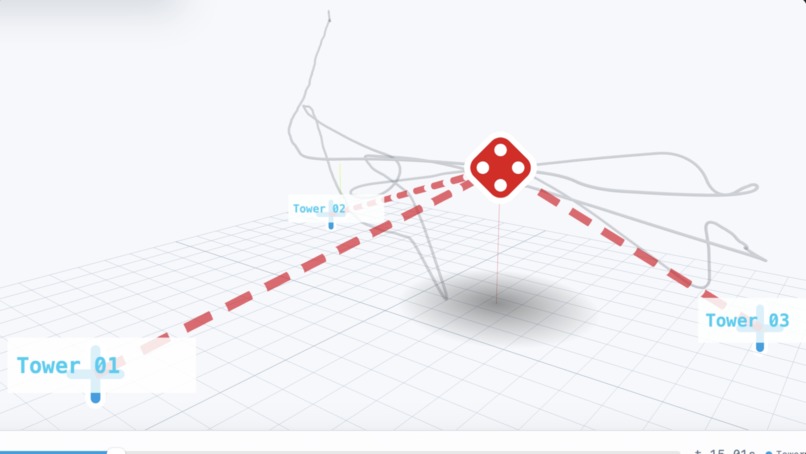
Final rendering of triangulation

Inspiration
We wanted to build a system that can find unknown drones early and react fast.
What it does
Ground cameras detect a drone and follow it. From the camera angles, the system calculates the drone position using triangulation. Then a defense drone can start, fly to the target, detect it with its own onboard vision, follow it, and catch it with a net.
How we built it
We connected camera tracking, position calculation, and drone control into one system. The ground system finds the target, and the defense drone uses its own vision to finish the mission.
Challenges we ran into
It was hard to track small moving drones, calculate a stable position, and connect all parts in real time.
Accomplishments that we're proud of
We built a working idea that combines detection, tracking, positioning, and defense in one system.
What we learned
We learned how camera tracking, triangulation, and autonomous drone control can work together.
What's next for Integrated Drone Defense & Situational Awareness System
Next, we want to make the tracking more stable, improve the drone vision, and test the full system in more real-world situations.
Built With
- arkit
- civtak/atak
- javascript
- python
- swift
- three.js

Log in or sign up for Devpost to join the conversation.