



Inspiration
Our inspiration to make this device began from the millions who have struggles of being unable to see. There are many blind people who battle the frail navigation systems of a cane. To us, the sense of sight is taken advantage of and we don't realize the efforts that blind people must put in to survive through day-to-day actvities. There are many who feel out casted for looking and moving differently than others. Our device is meant to tackle this problem and allow technology to work with those who are blind and enable them to walk in confidence and without fear.
What it does
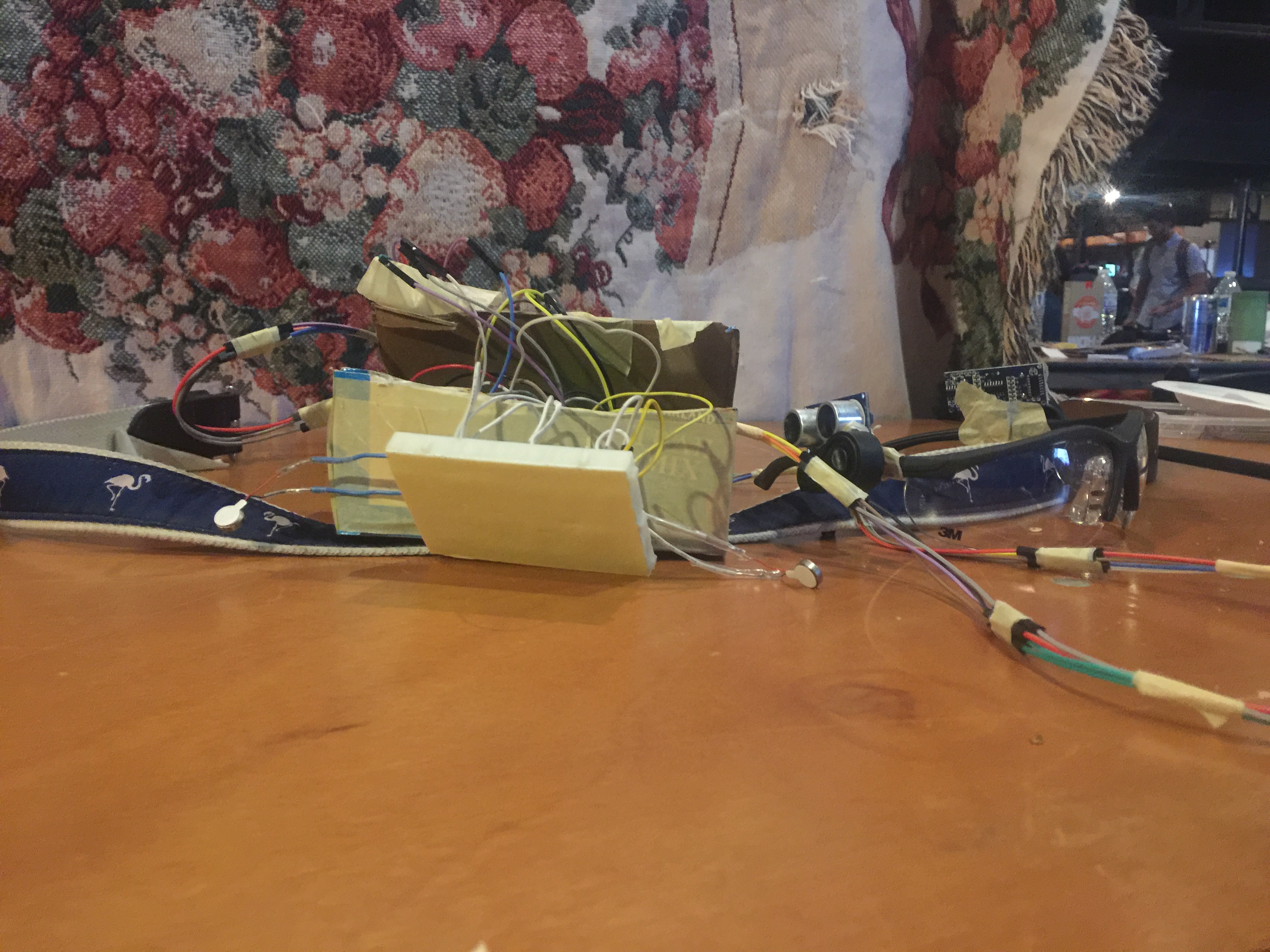
This device will allow blind people navigate through their daily lives and be ble to know when there are obstacles in their way. For our prototype, our device is able to tell the person when an object is getting near them(by increasing vibrator sensor frequency) and be able to know if they need to go up and down staircases. We also built parts to tell the user if there are obstacles or obstructions on their sides using glasses(however isn't fully implemented and explained why in the challenges ran into).
How we built it
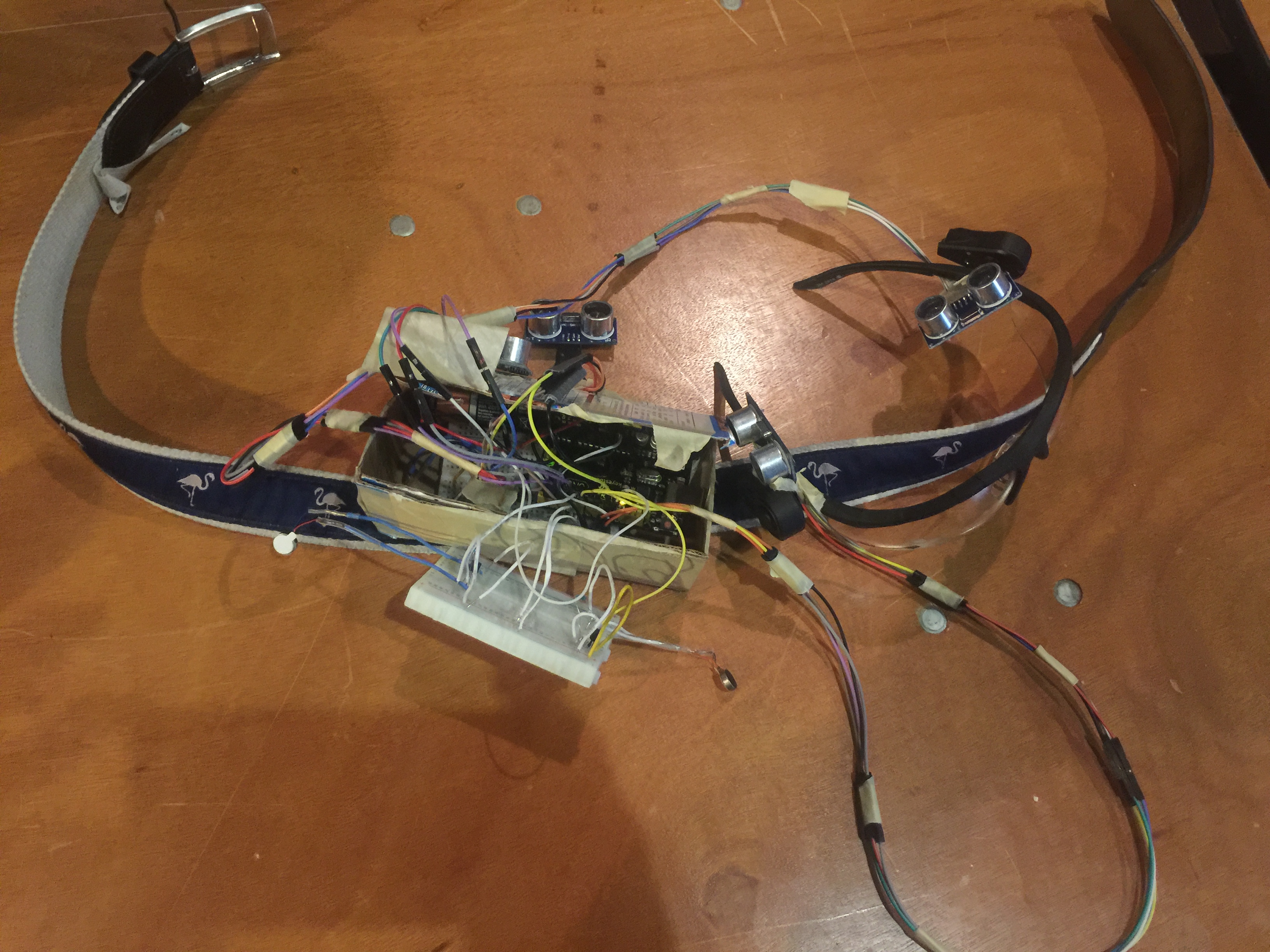
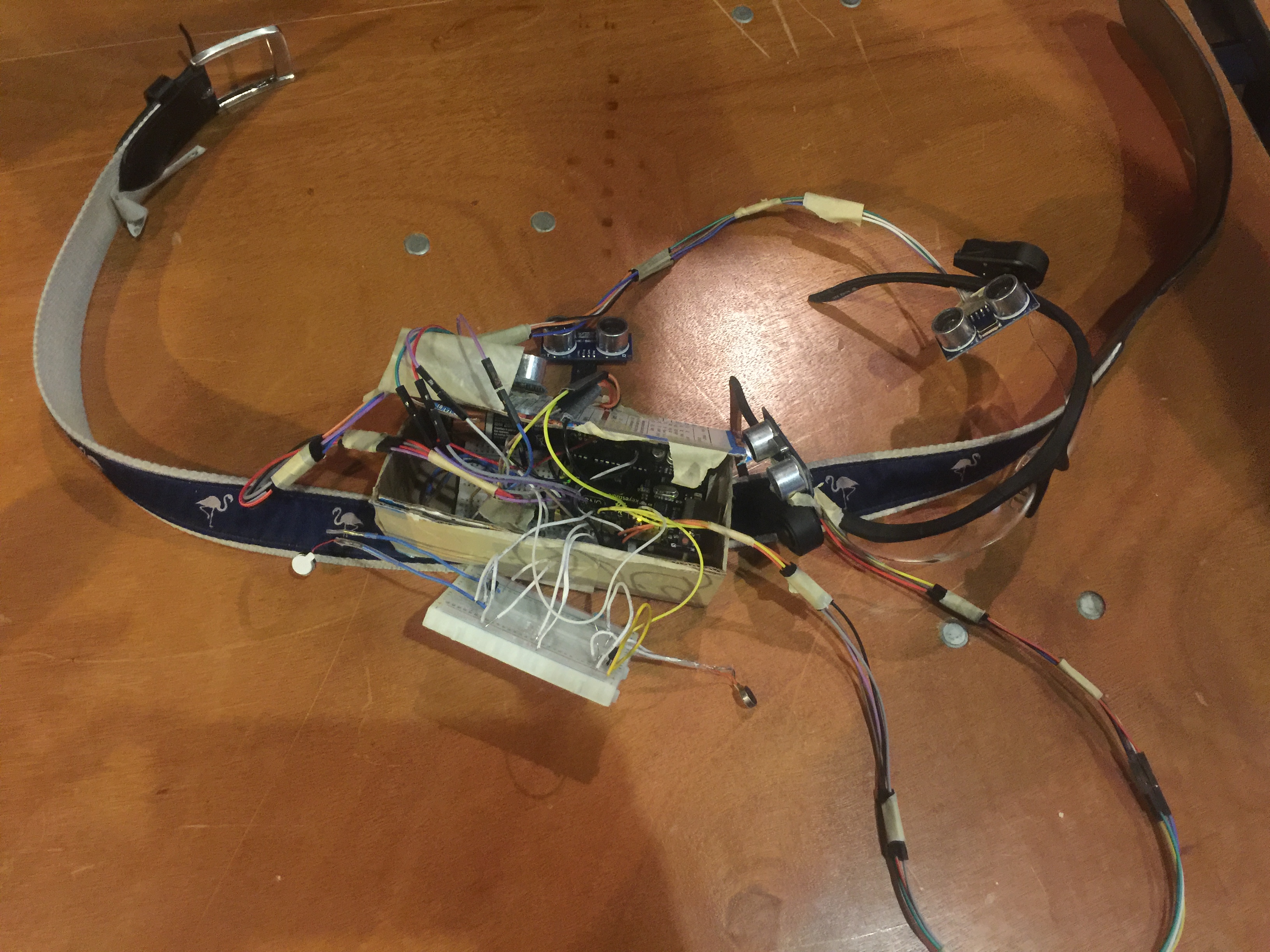
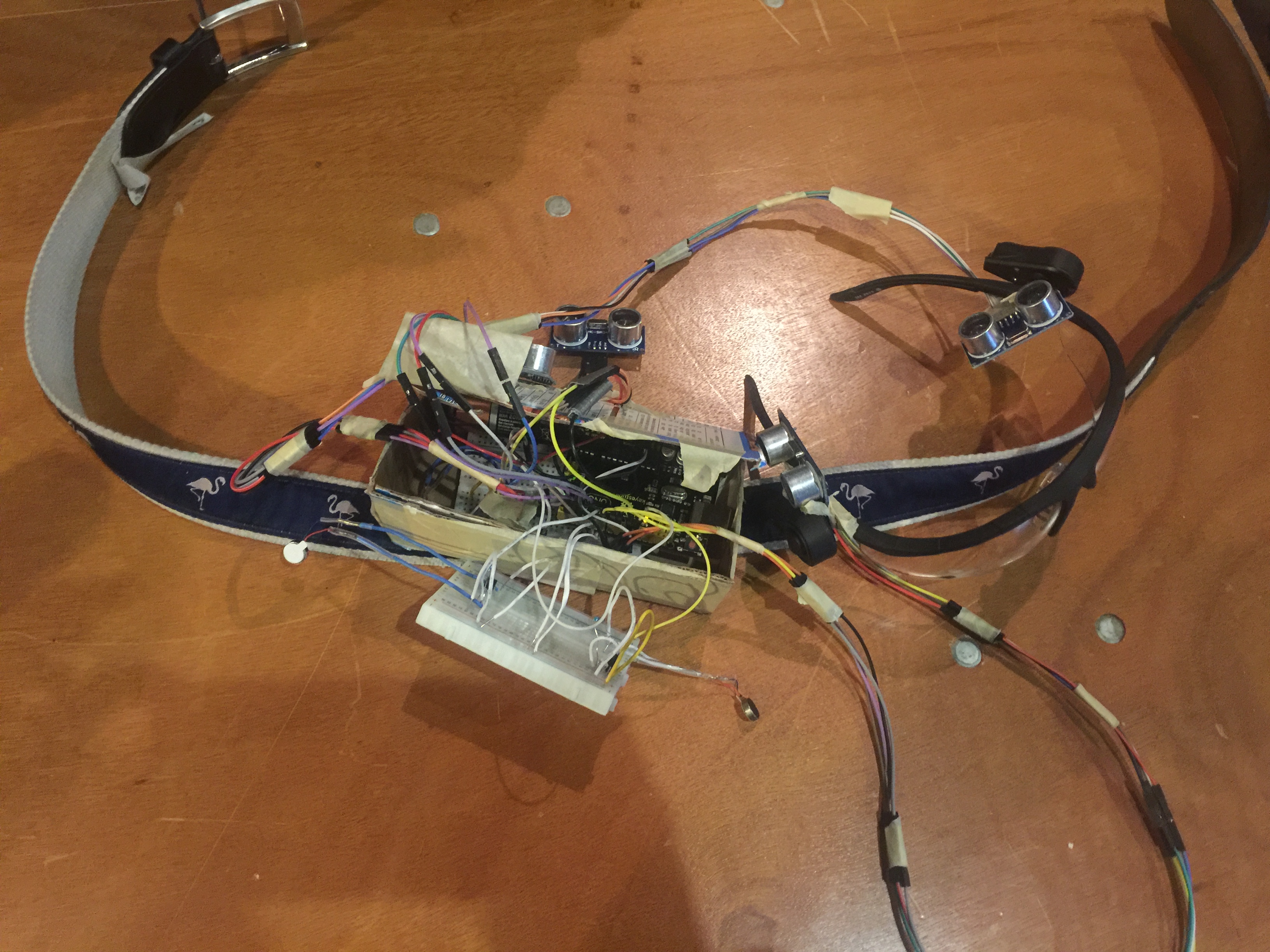
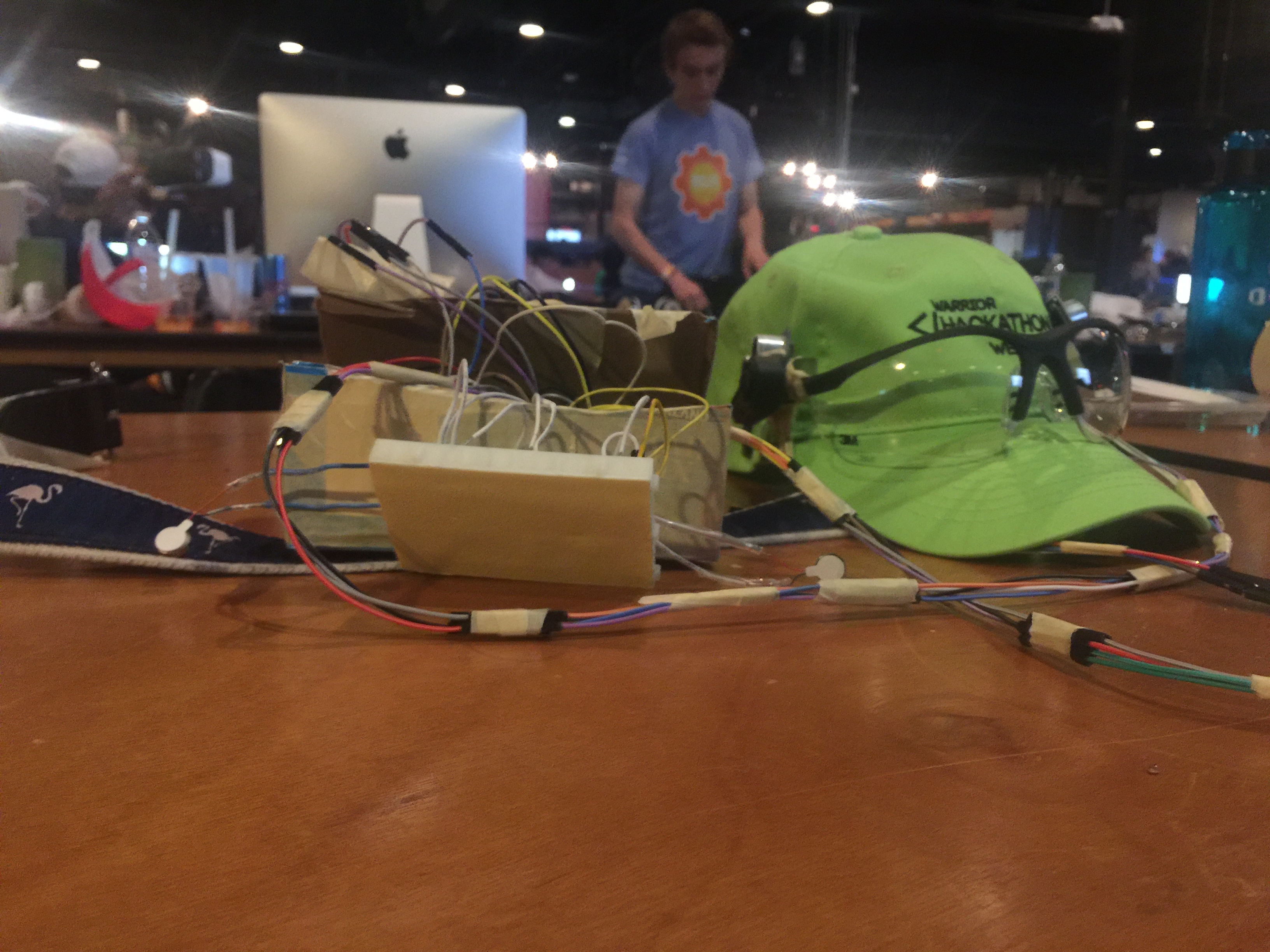
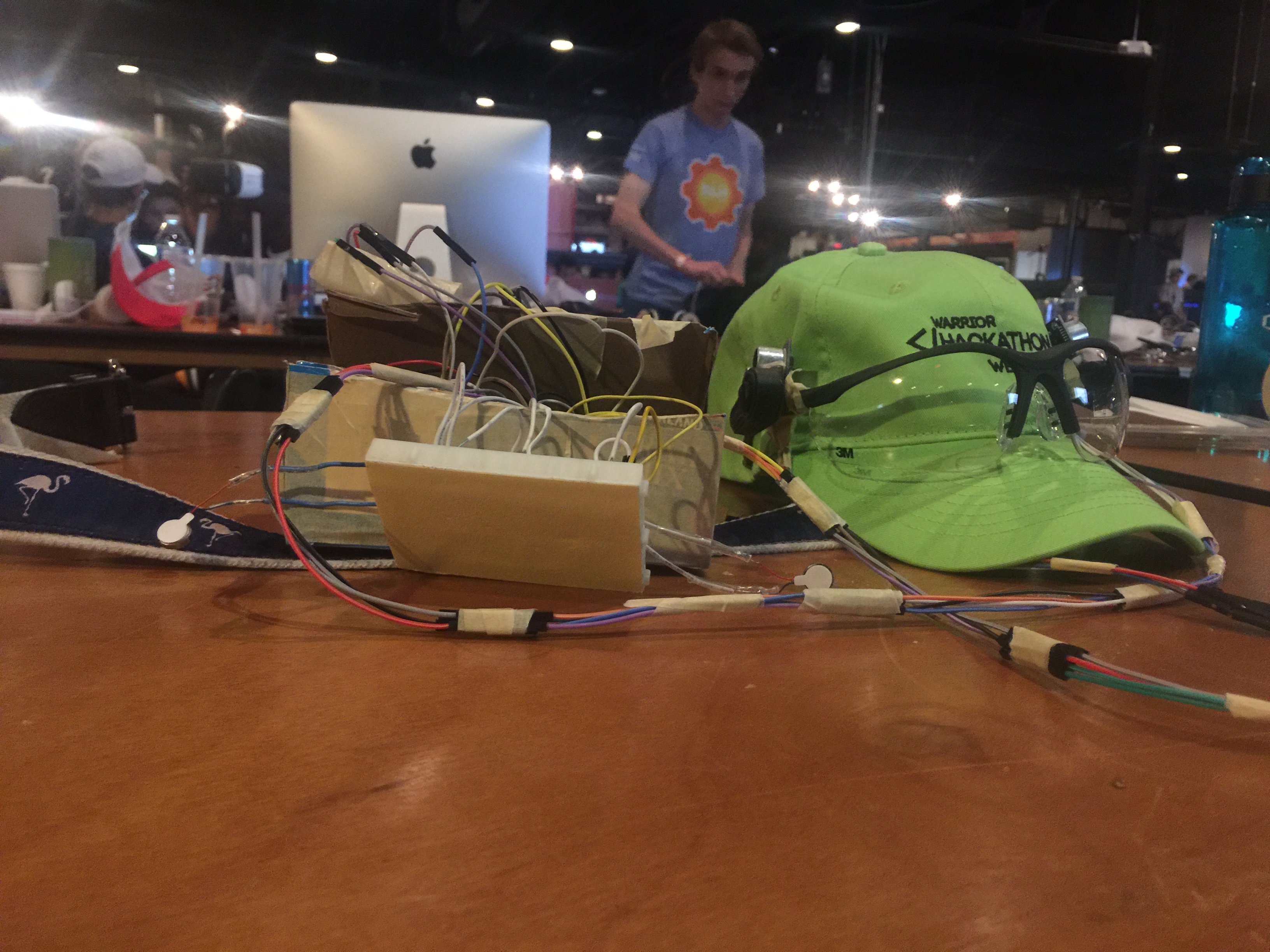
We used Arduino and used C as its coding language. We also used a breadboard to connect to the arduino, sonar sensors (to detect objects and their distance away from the person), and vibrating motors(which will signal to the user when an obstacle is in their way).
Challenges we ran into
Our biggest challenge was battery power since all the sensors and motors took some charge and using the arduino, there wasn't much voltage that came along with it. Specifically when we tried to implement the glasses as sideview sensors, it would no longer work since there wasn't enough battery power to make the entire system work. Another challenge we ran into is making it user friendly in its convinience of weight and space. We had difficult to find spacy that fits the arduino, bread boards, and wires for this device as well as make it confortable for the user (however this challenge was combatted using a fanny pack style belt, making it stylish and fit for the device and user).
Accomplishments that we're proud of
We are really proud at how well the vibrating motors work with the sonar sensors, as they are able to tell the person when an object is getting near us. Also figuring out depth perception of the floor was very difficult to figure out, but now we can notify the user when they need to go up stairs when needed. Of course the device detecting obstacles like walls and tables is another very important accomplishment.
What we learned
We learned how to use jumper wires with the breadboard and arduino as well as program in C. It was a nice advanture and we learned how to be patient with our technology so that they work with the user and not just the voltage.





Log in or sign up for Devpost to join the conversation.