-
-
Industrial Magnetic Waste Collecting Robotic Vehicle
Inspiration
Industrial magnetic waste or magnetic metal scrap is the combination of left-over, obsolete, unused, or inoperable metal waste (iron filings in most cases) produced in factories or production houses, that can be recycled and reused in order to save production costs. Recycling and reusing such scrap metal would indeed preserve the environment. However, it often happens in industries that due to the automated processes, the scraps pile up rapidly every day and it becomes very difficult to manage it. Currently, semi-trailer trucks are manually controlled by employees to scoop scrap piles to its designated place in order to work with them efficiently, but the downside to this method is that they also end up scooping non-magnetic debris like plastic which creates a second task of separating our desired metal scrap from the rest, which is a tedious process. If the task of separating the desired magnetic metal is not done correctly, the manufacturer could risk spoiling his recycling machinery. Additionally, cleaning and separating such waste is very tedious for a human being. To solve this problem, we have taken inspiration from the Disney film Wall-E (whose sole purpose was tidying up the planet) and have designed a project that is autonomous in itself so it can navigate around the factory without getting damaged and synchronously perform the waste collection. We have also exploited the scrap’s property of having an affinity to magnets in order to eliminate the second task of separating the waste altogether. We have implemented a manual override switch to toggle to the remote-control mode for a case where the autonomous robotic vehicle does not operate as planned. Additionally, we have also fit lights and music to let the factory workers know of the bot’s presence, especially during the night.
What it does
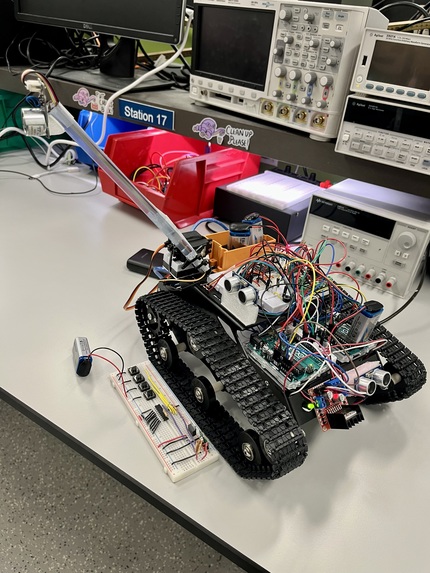
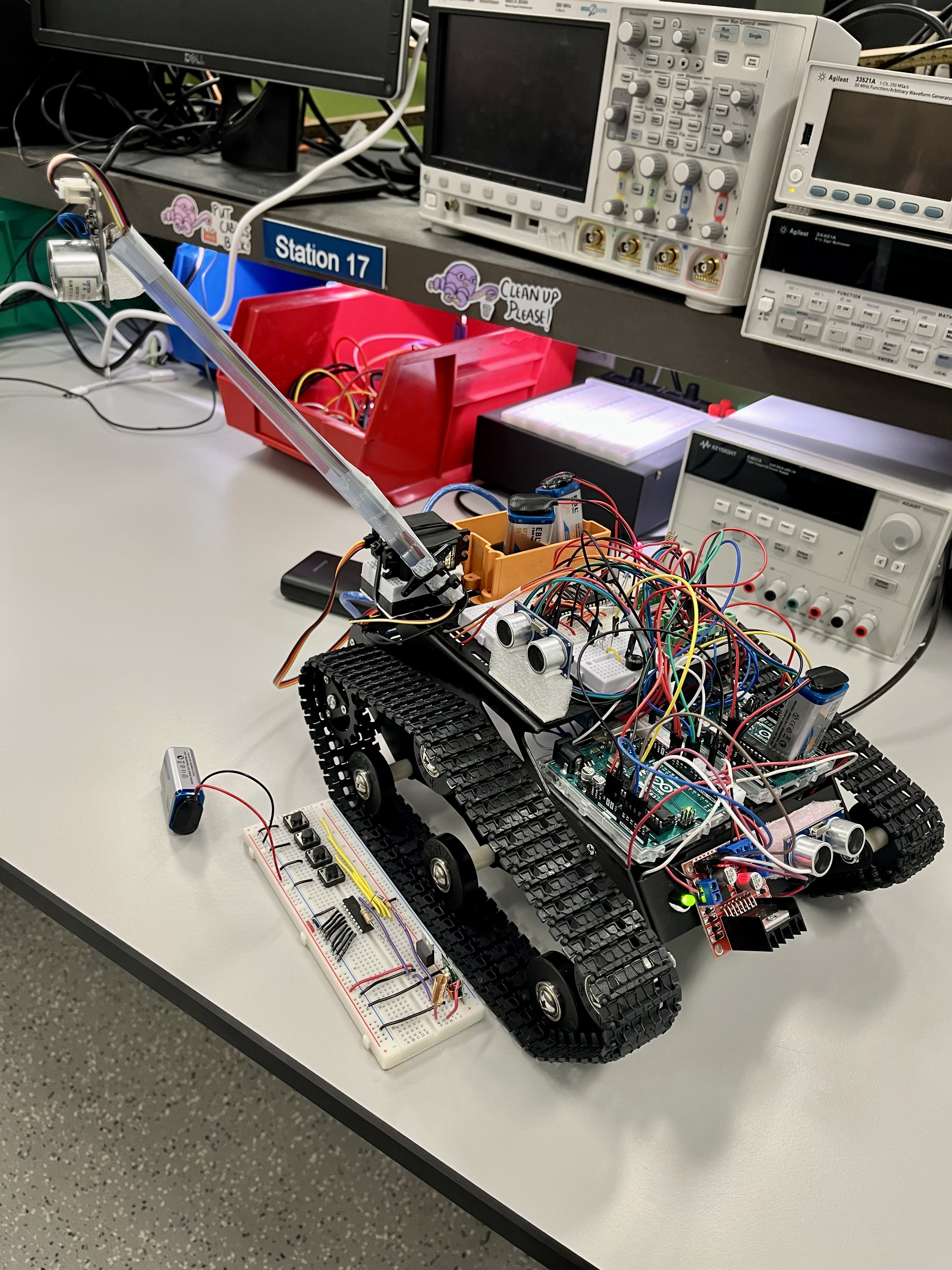
Our project aims to automate the process of collecting industrial magnetic waste like iron filings using a robotic vehicle. This vehicle will autonomously move around the floor plan avoiding obstacles along its path while collecting magnetic scrap metal using its arm. The arm will have an electromagnet that will magnetize to collect the scrap metal and then fold itself to demagnetize and drop the scrap metal in the container placed in the middle. To avoid collision between the arm and the wall, this arm will also fold when a wall is detected adjacent to it. The robotic vehicle would also have a wireless remote control for a contingency situation where the obstacle avoidance circuit would fail, and manual operation is required.
How we built it
We have successfully tested and implemented the model. All milestones were achieved in time. The ultrasonic values were not perfect, so a bit of approximation had to be done to set the range. The electromagnet was almost industry grade in terms of its magnetic power. For the sake of this project, we had to reduce its strength by providing low PWMs to it with the hope that residual magnetism would wear off fast enough so that the ‘metal scrap’ can be easily collected in the container. With the given time and resources, we even managed to find some time to add extra features to the project. All in all, the project was a grand success, and we are really grateful for having the opportunity to express our creativity.
Challenges we ran into
Our design of the robotic arm has only one degree of freedom, which restricted our precision of making the collected scrap fall exactly inside the installed container. The main obstacle that we faced while executing our project was the generation of residual magnetism in the electromagnet and hence, even after demagnetizing it, the scrap wouldn’t fall. To solve this, a better electromagnet which generates very less residual magnetism could be used in the future.
Accomplishments that we're proud of
We are really proud of achieving the synchronous robotic arm movement where three different parts like servo motor, electromagnet and an ultrasonic sensor functioned together. We are also very happy with our RF remote control circuit which gives the user a manual control.
What we learned
We have learnt a lot from this project, especially the technicalities of Timers and Interrupts in Atnega328P. We have not only implemented our proposed project idea, but have also gone above and beyond in implementing additional features.
What's next for Industrial Magnetic Waste Collecting Robotic Vehicle
This project can be expanded in the future by adding a camera for monitoring and then performing path planning using a Raspberry Pi where the entire floorplan can be pre-mapped better operation. We also wish to implement a scrap overflow alarm using an IR sensor and buzzer. Since we are only implementing one arm for this project idea, we would like to implement another arm on the other side.




Log in or sign up for Devpost to join the conversation.