-
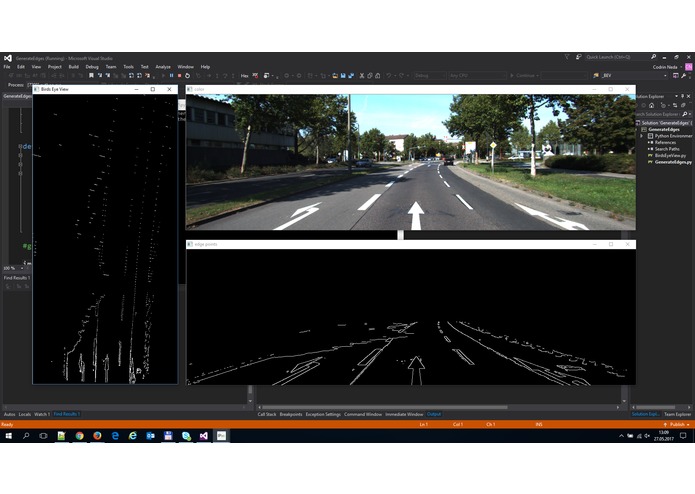
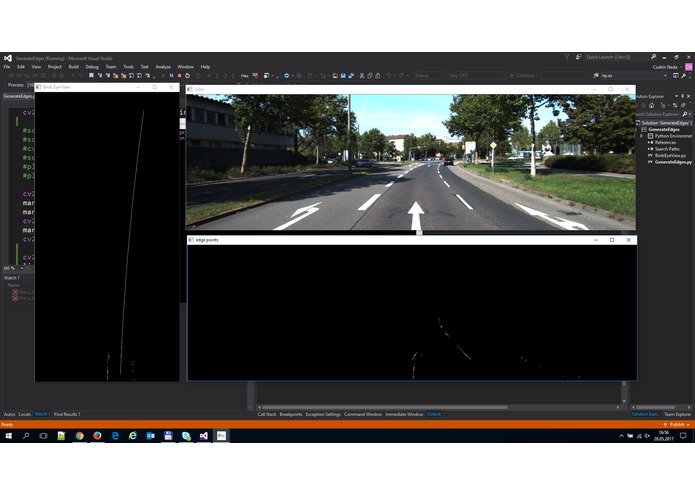
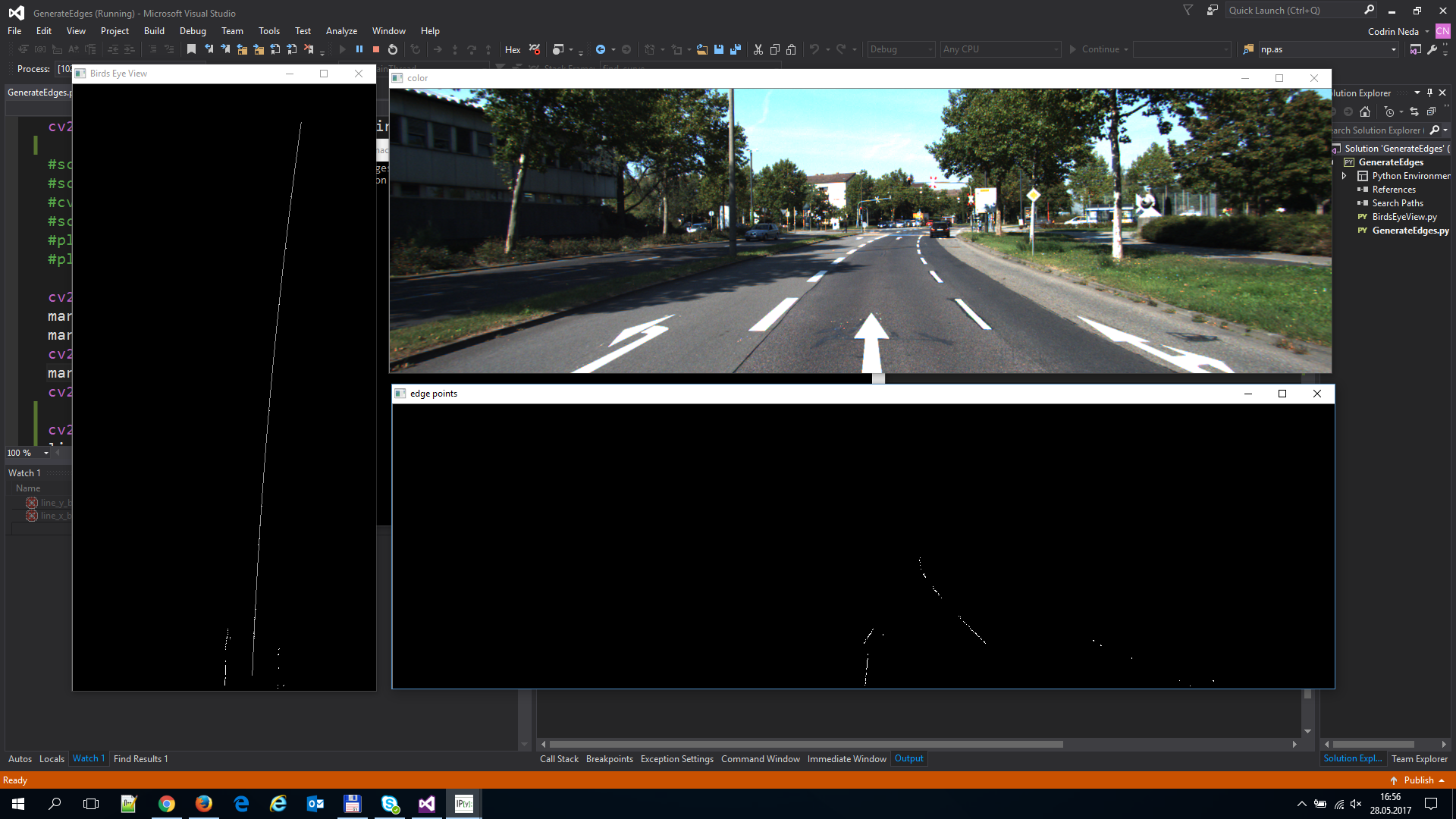
intermediate results
-
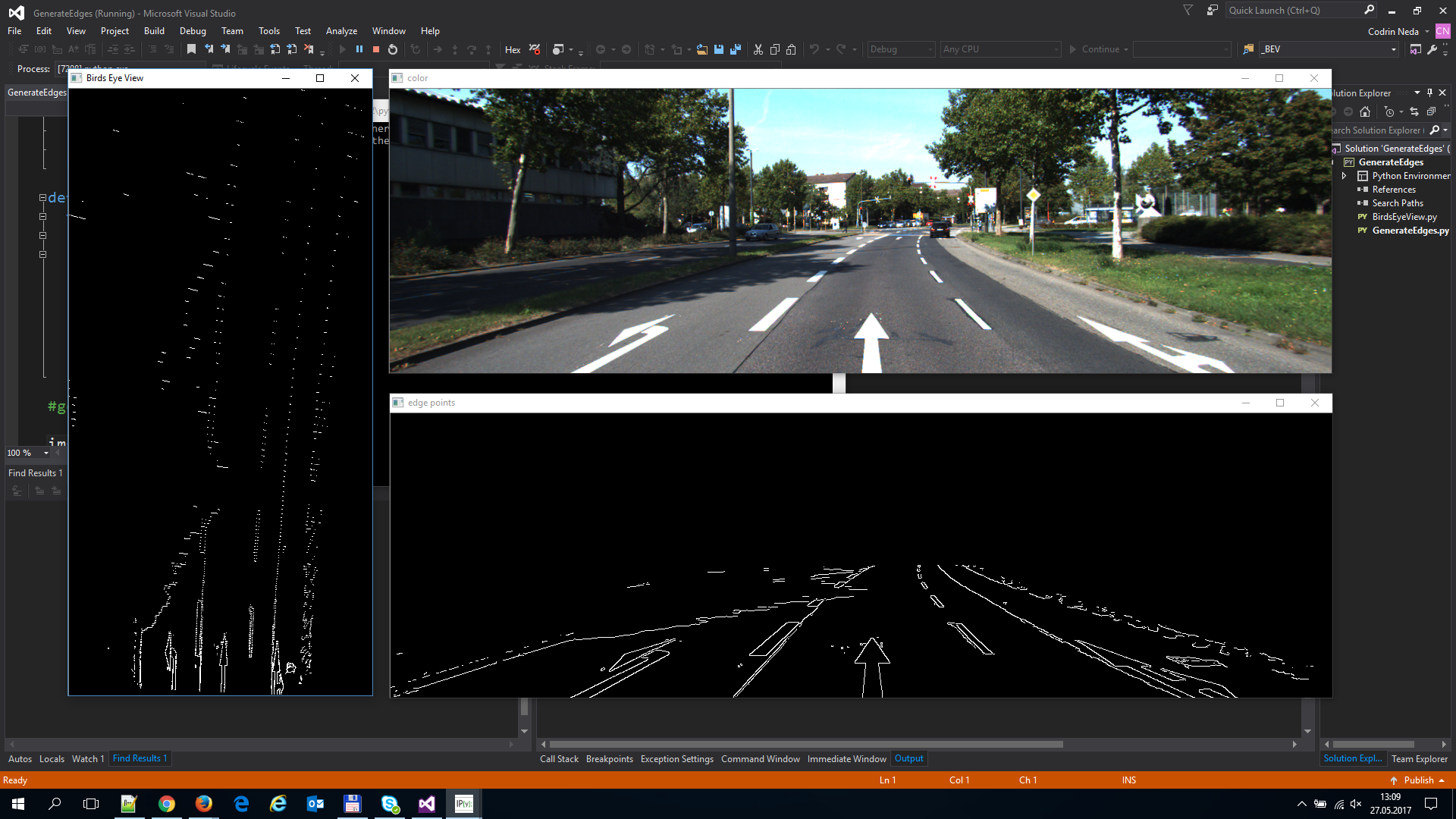
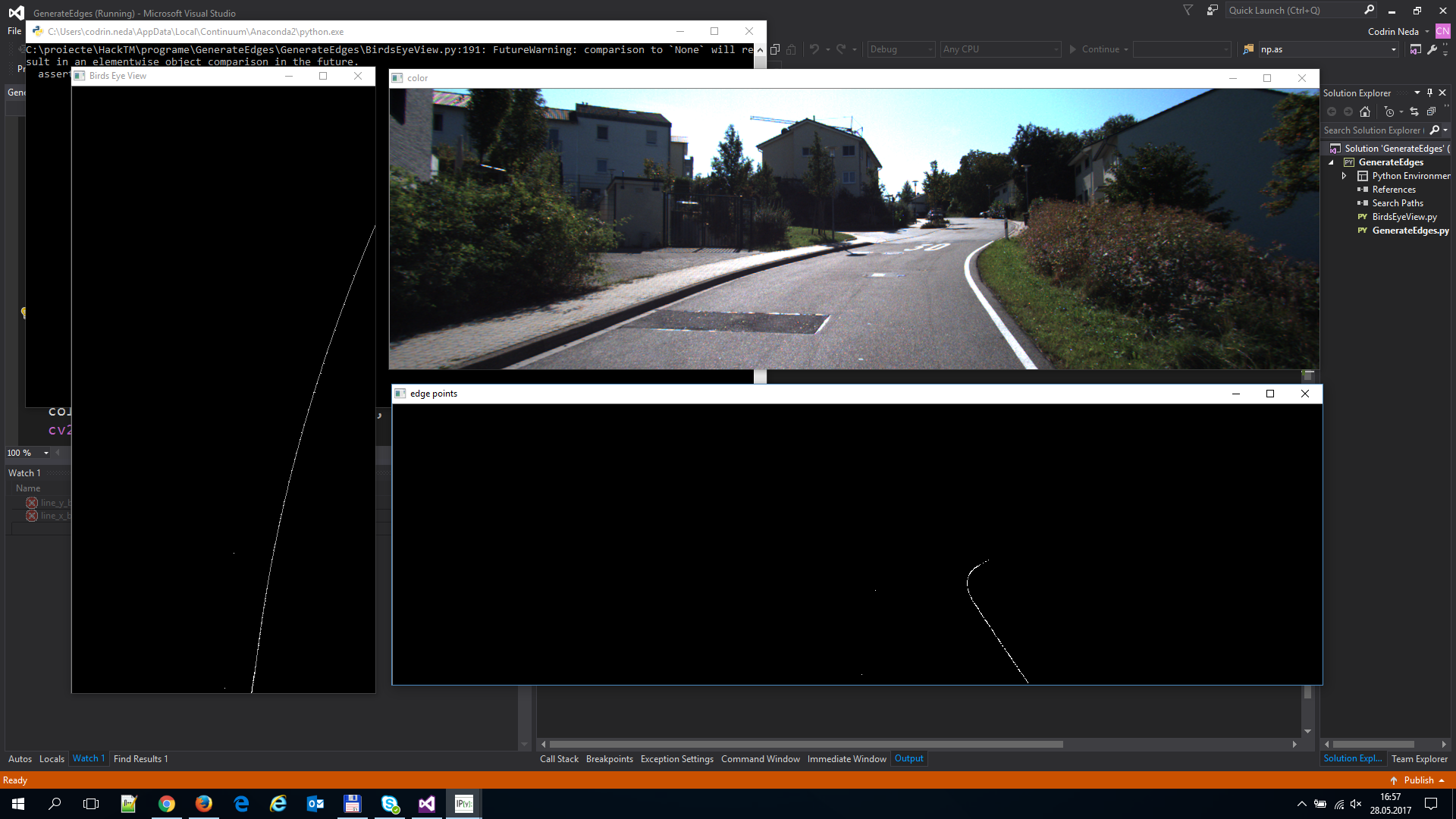
final results
-
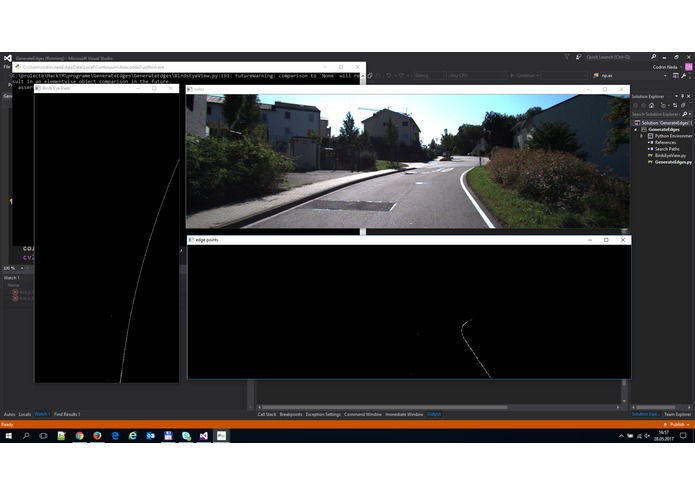
final results
Inspiration
Keep the car on the ego lane.
What it does
Starting from a photo taken from a car on the motorway it detects the lane markings.
How we built it
It searched the image after gradient patterns specific to lane markers. The results are used to find the curve that fits the most points. We used python, java and OpenCV. We used the KITTI road dataset.
Challenges we ran into
There was not enough time.
Accomplishments that we're proud of
We succeeded in finalizing this project (detection works only on the right side).
What we learned
There were no important lessons but we met a lot of people.
What's next for Image-Based Lane Detection
The project was build to have fun. There is nothing next.

Log in or sign up for Devpost to join the conversation.