-

Our Robot
-
Our Team
-
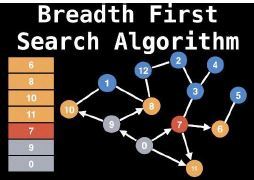
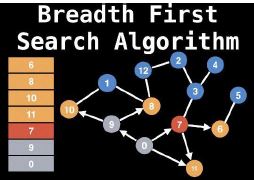
Our strategy

Inspiration
Wanted to build on the knowledge from last year's Moon Rover and adapt to this year's challenge
What it does
- Robot autonomously navigates to survivor group avoiding obstacles and brings them back to base
How we built it
- Re-used mBot robot
- Leveraged our solution with the LRT Detour challenge
- Build -> Test -> Fix -> Refine
Challenges we ran into
- line following ability of robot depended greatly on room lighting and track properties
- Speed and accuracy of robot needed to be adjusted constantly
- Sensor reactivity
- Needed to seek clarification sooner on rules
Accomplishments that we're proud of
- made several improvements over the design cycle to ensure that the shortest path was taken to avoid unnecessary detours
What we learned
- We learned many things throughout this challenge including perseverance, coding, research skills and teamwork
What's next for IEEE Ottawa Robotics Competition Arduino Challenge
- Looking forward to future challenges!

Log in or sign up for Devpost to join the conversation.