


Inspiration
With interest in Myo band, motors, home-automation system, what we came up with was to integrate all of our interests into automating a very common object present in our lives, such as a trash bin. A normal trashbin, usually stationary in everyday life, can become a much useful tool that could carry home-automation system, detect humans nearby with some sensors(ultrasound) and computer vision programmed camera. We made a fairly friendly looking design of our system. Hope you like what we came up with.
What it does
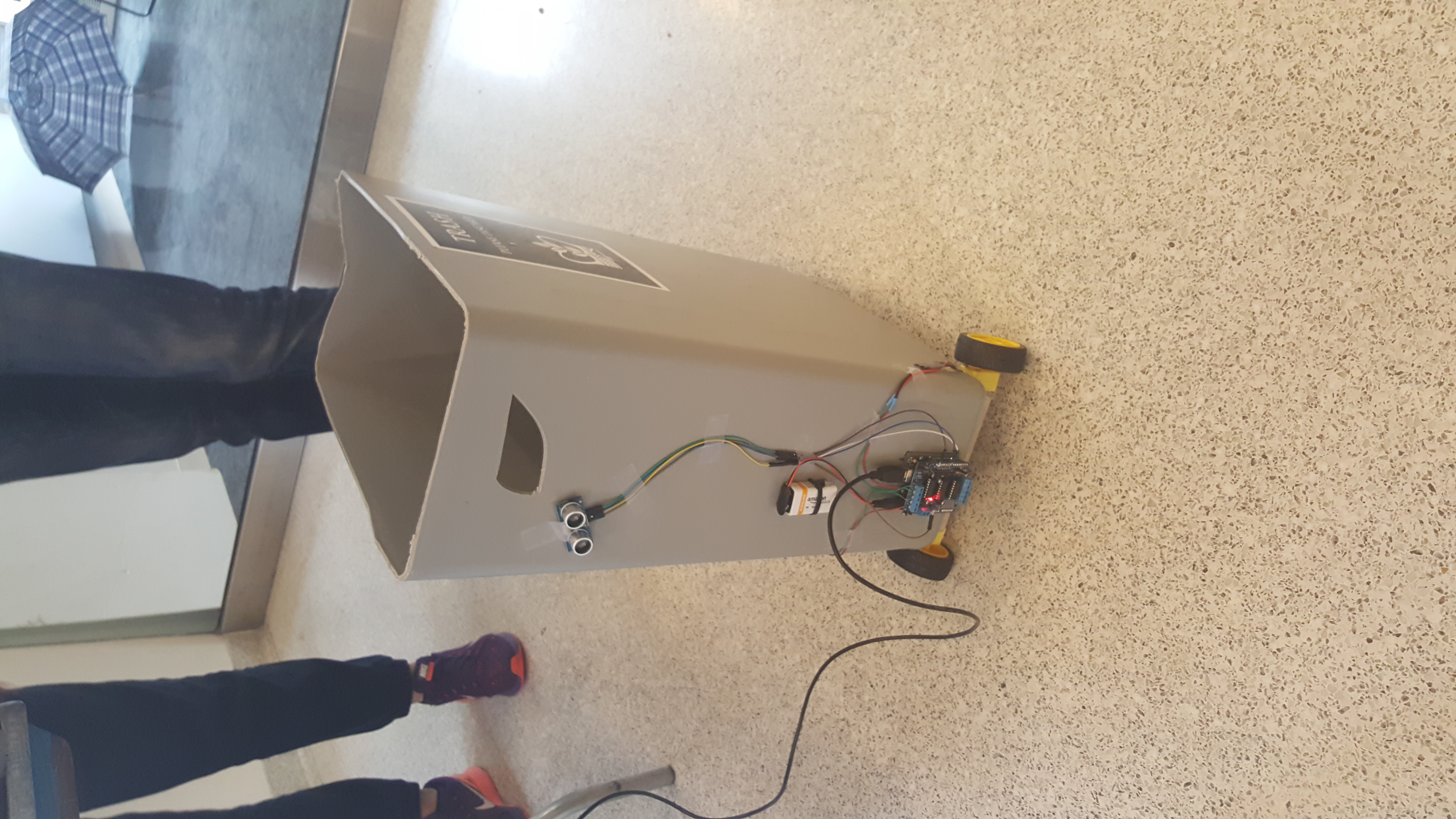
It moves via Myo band gesture control for now with forward/back/pan left/pan right. It has an audio system playing Mario song. It has an ultrasound sensor that could also drive this trash bin autonomously based on distance values(we haven't completed this step yet.)
How we built it
We used Myo band, Arduino Uno, wheels, DC motors, Trash bin, Motor shield.
Challenges we ran into
Trying to use various softwares and hardwares, and trying to make them work together took a long time for us. Our initial goal had to be changed in the middle of this Hack, but thankfully we were able to come up with a pretty good idea. Developing our hardware was quite tough too. It involved significant time in the Makerlab to modify parts, build connectors.
Also, the provided DC motors were very low powered ran motors. It would have been nice if we were provided with a bigger & stronger motor
Accomplishments that we're proud of
Design of our final product, and we were able to learn how to use Myo band to gesture control a quite a big-sized robot.
What we learned
How to use Myo band, Leap Motion, and how to combine several technologies together.
What's next for I opt trash(IOT)
Integrating temperature, humidity, computer vision algorithms, improve on the product's shape, use bigger motor, some machine learning algorithms to make this bin move alot more pet-like.

Log in or sign up for Devpost to join the conversation.