-
-
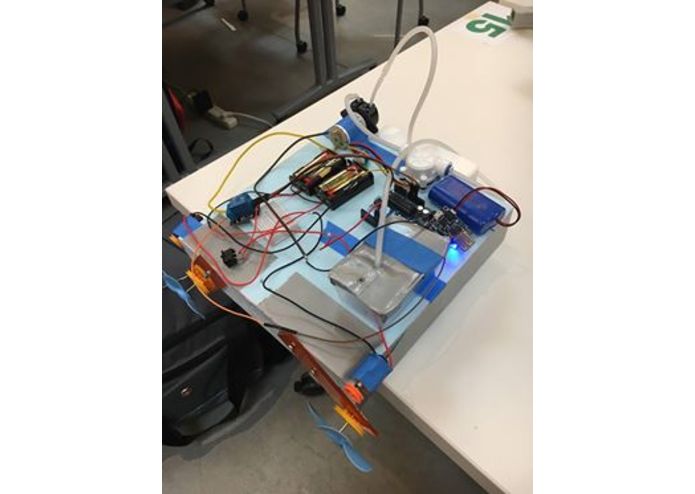
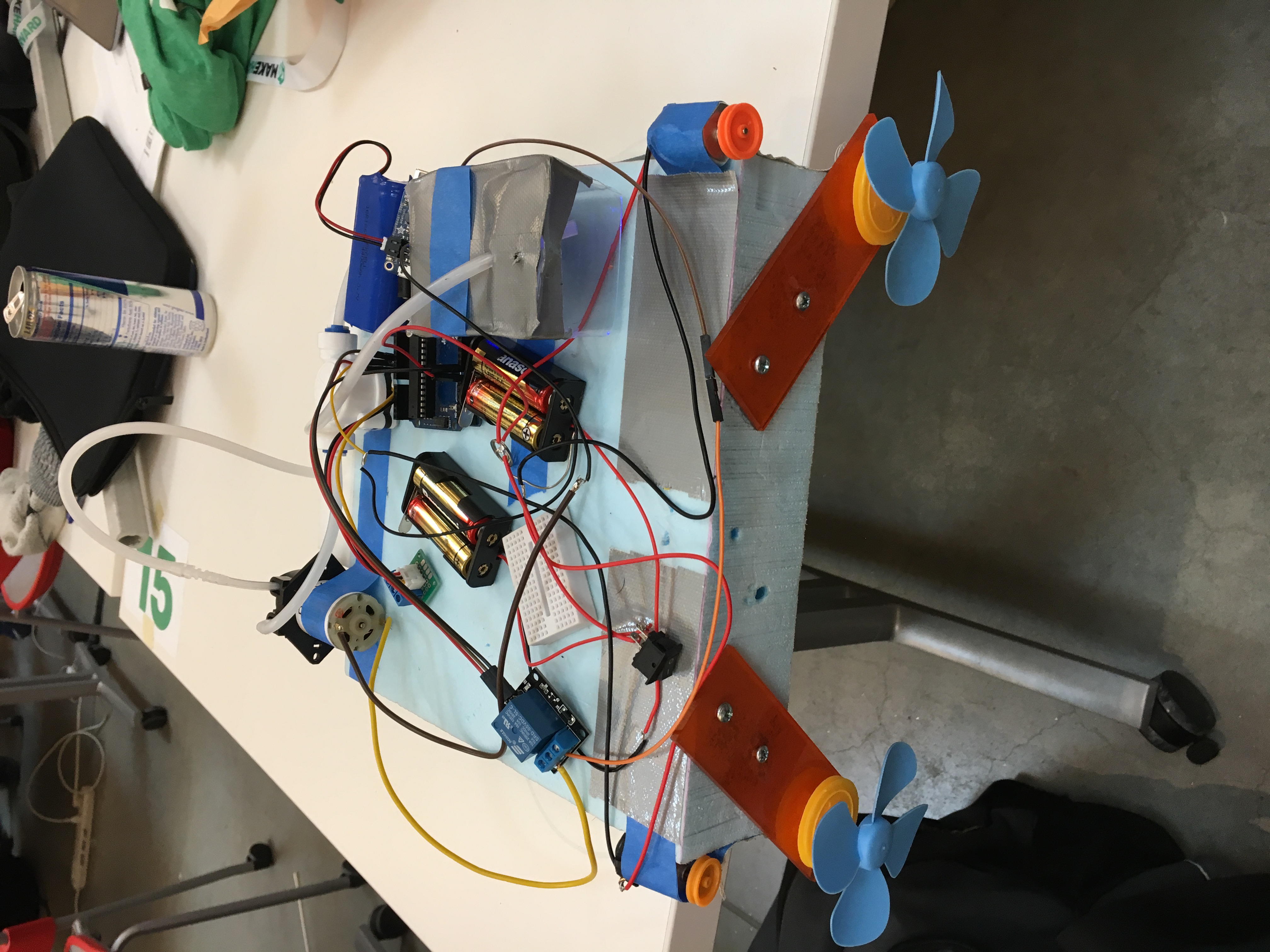
Final USV!
-

Team Hydrophobes!
-
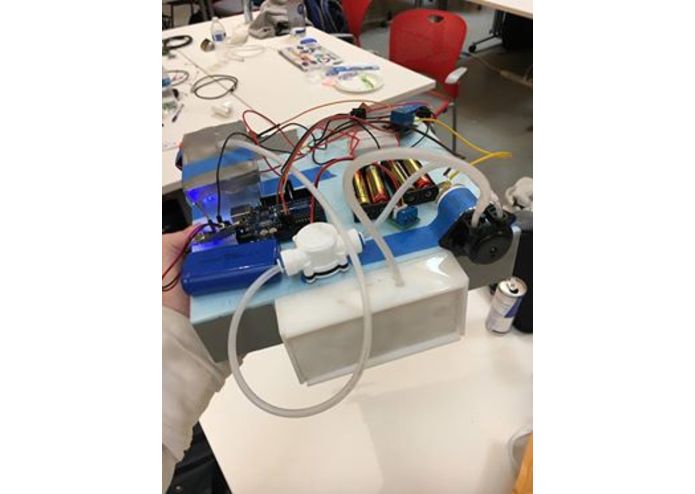
View of foam filter connected to a pump to remove oil, oil passed through our flow meter and collected in a pressure sensitive container
-
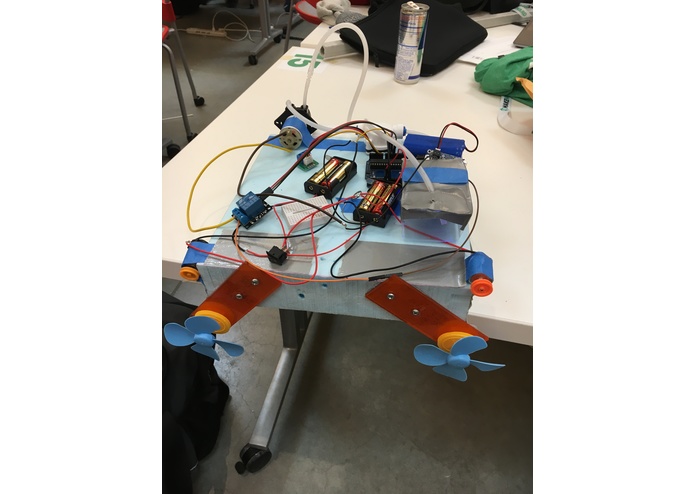
View of our propulsion system + circuitry in progress
-
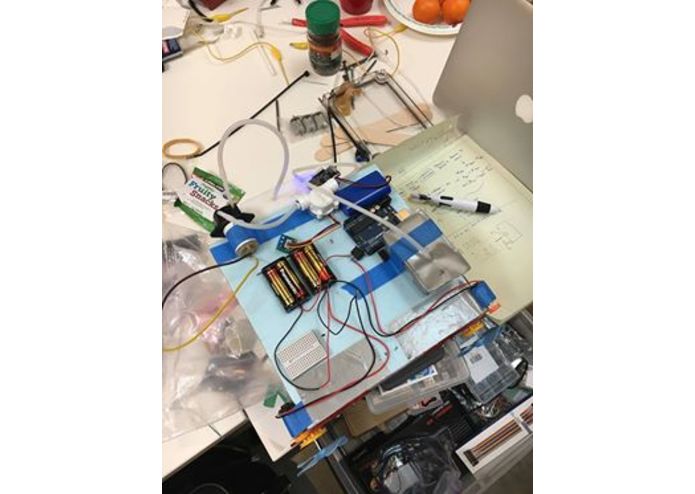
USV in progress
-

Melamine sponge pre-polymerization




Inspiration
Current methods of cleaning oil spills use large vacuum hoses or absorbent materials to collect oil from the surface of bodies of water. These methods are frequently inefficient and require off-site water purification of the mixture collected. We decided to combine the absorbent material and vacuum technology in one automated system using composite technology adapted from work done by Xuemei Chen, et. al. We wanted an innovative solution that would only collect oil, which we accomplished using an absorbent foam coated in a hydrophobic polymer as our main filtration system.
What it does
The main feature of our unmanned surface vehicle (USV) is to remove oil from water in a single step using our composite filter. Ideally, no water is absorbed by the sponge filter following polymerization. Just in case things went wrong (things always go wrong), we wanted to be able to measure efficiency. As such, we also included a flow meter to measure the rate of liquid collected along with other sensors which we utilized to monitor the volume percentage of water collected (ideally zero!).
How we built it
We originally planned on using an Arduino Uno to control the direction of the USV along with collect relevant data about the system's performance. However, we ran into numerous errors with our motor servers and had to modify our system. We ended up only using the Arduino to monitor volume percent of water and the total volume of liquid collected. We used a foam core base and mounted our pump, circuit, sensors, motors, and oil collection on top and our composite filter at the front of the vehicle. We spent many hours troubleshooting CAD, 3D printing, laser cutters, and Arduino to put it all together!
The main filter uses a pollutant melamine foam (aka mr clean magic erasers) which is highly porous and absorbs oil. We coated this in hydrophobic polydimethylsiloxane (PDMS) suspended in acetone to allow for a room temp cure. The composite only uses commercially available materials and absorbs oil without collecting water!
Challenges we ran into
Our team is comprised of mechanical, electrical, computer science, and materials engineering students, and there were challenges involved for each of us. First, we had to redesign our USV to be significantly lighter weight because our motors had little torque. We also reconfigured our drive system and worked around our failed motor servers. This was many of our first time using the Arduino language, soldering, and using rapid prototyping!
Accomplishments that we're proud of
Building an arduino app, troubleshooting as a team, adapting existing technologies for new applications when designing our filter, learning code!, earning out 3am MH stickers, and learning lots of new skills.
What we learned
Lots of code and circuits 101, rapid prototyping software, some materials synthesis
What's next for Hydrophobe's USV
First, we'd like to fix our motor drivers for better steering! In addition, we envision large scale applications - big oil spills but also industrial oil leakage management. Each of these applications would utilize larger filters, more powerful pumps, potentially off site oil collection. This would also allow more in depth data collection on system efficiency.
Built With
- arduino-uno
- liquid-flow-meter
- peristaltic-pump
- pressure-sensor



Log in or sign up for Devpost to join the conversation.