-
-
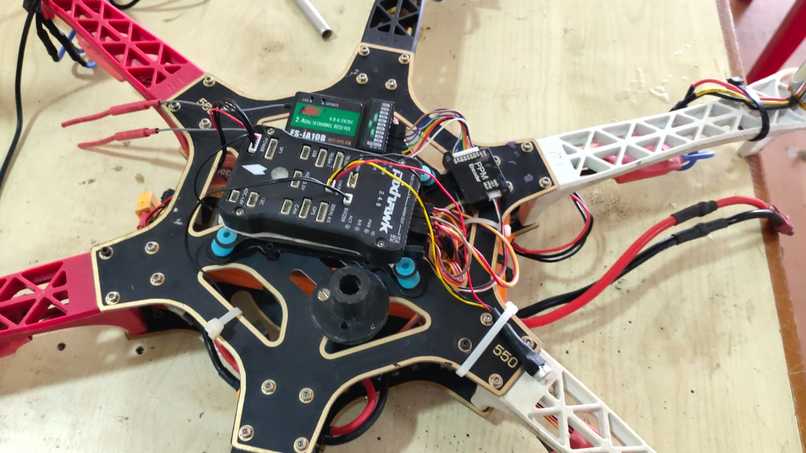
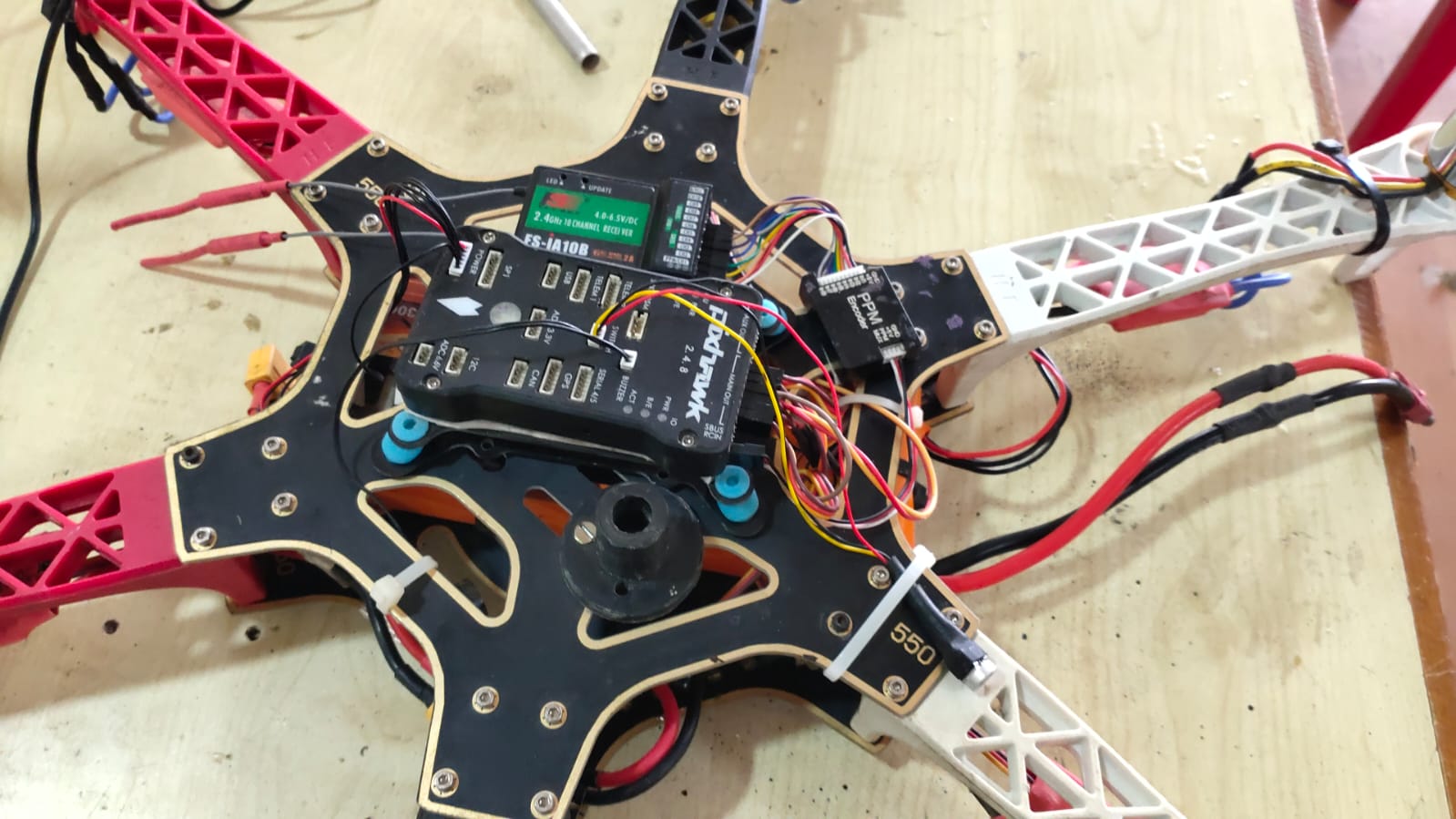
Hexacopter first build
-

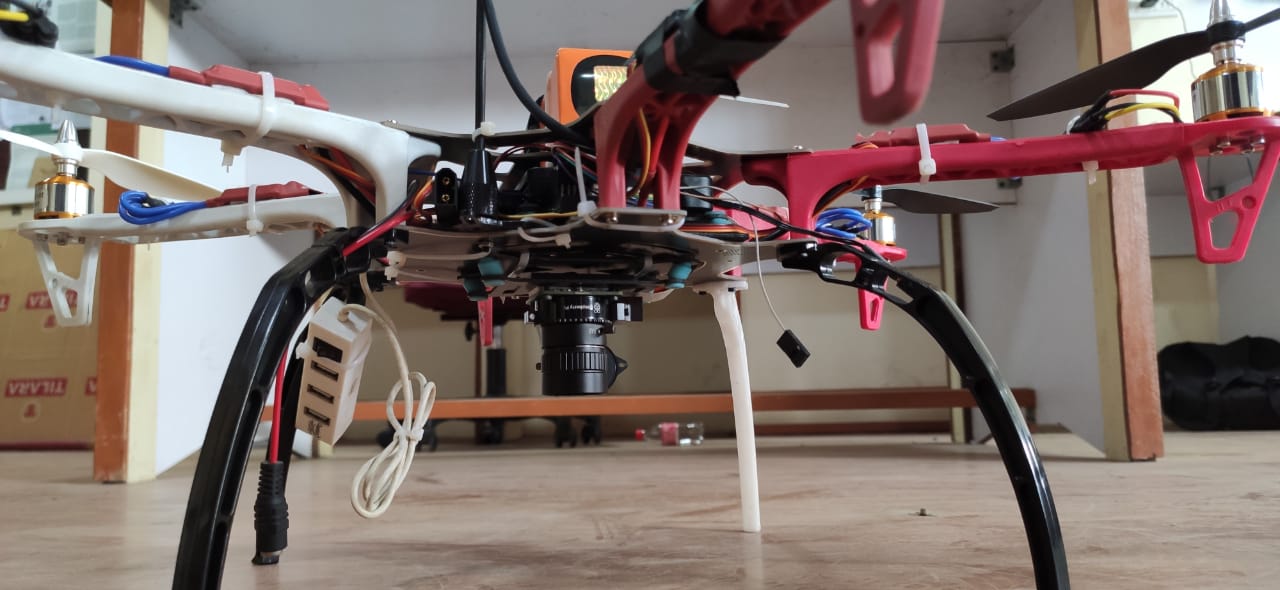
Final build
-
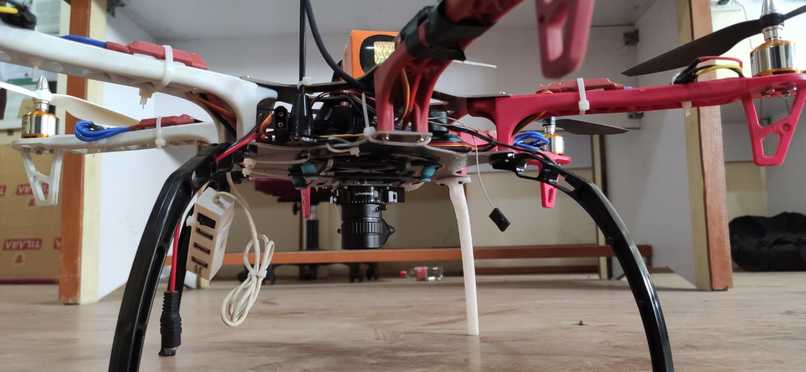
The raspberry pi camera is fixed and the arrangement of the electronics and battery are changed to increase stability.
-

GPS
-

Raspberry pi
-
Flight controller
-

Raspberry pi High Quality Camera
-

Lipo 4s battery
-
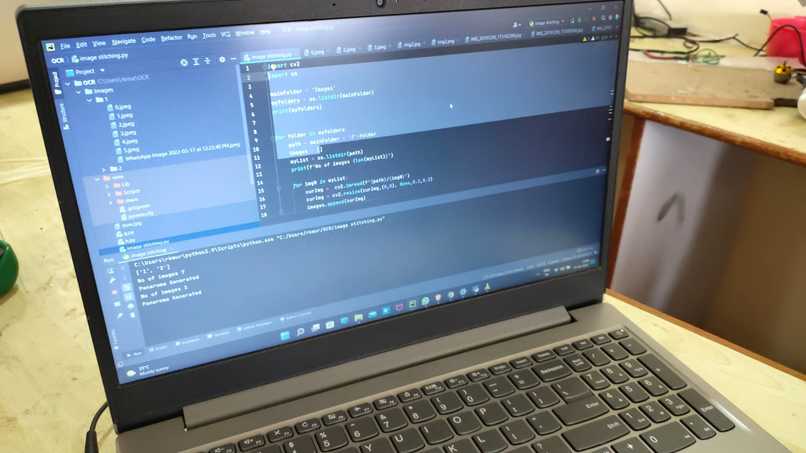
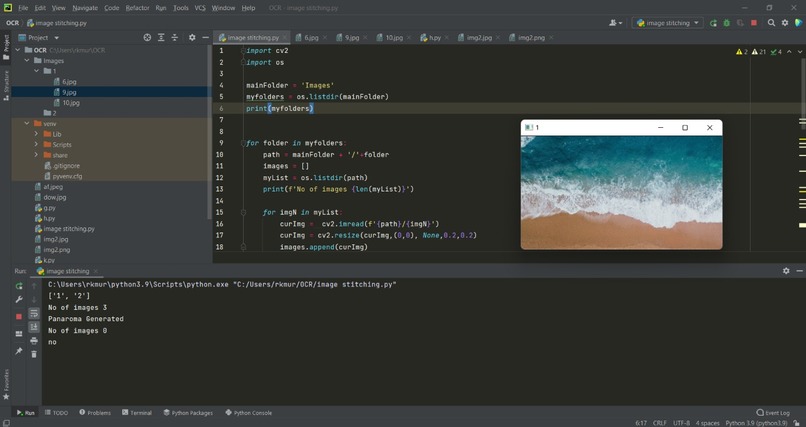
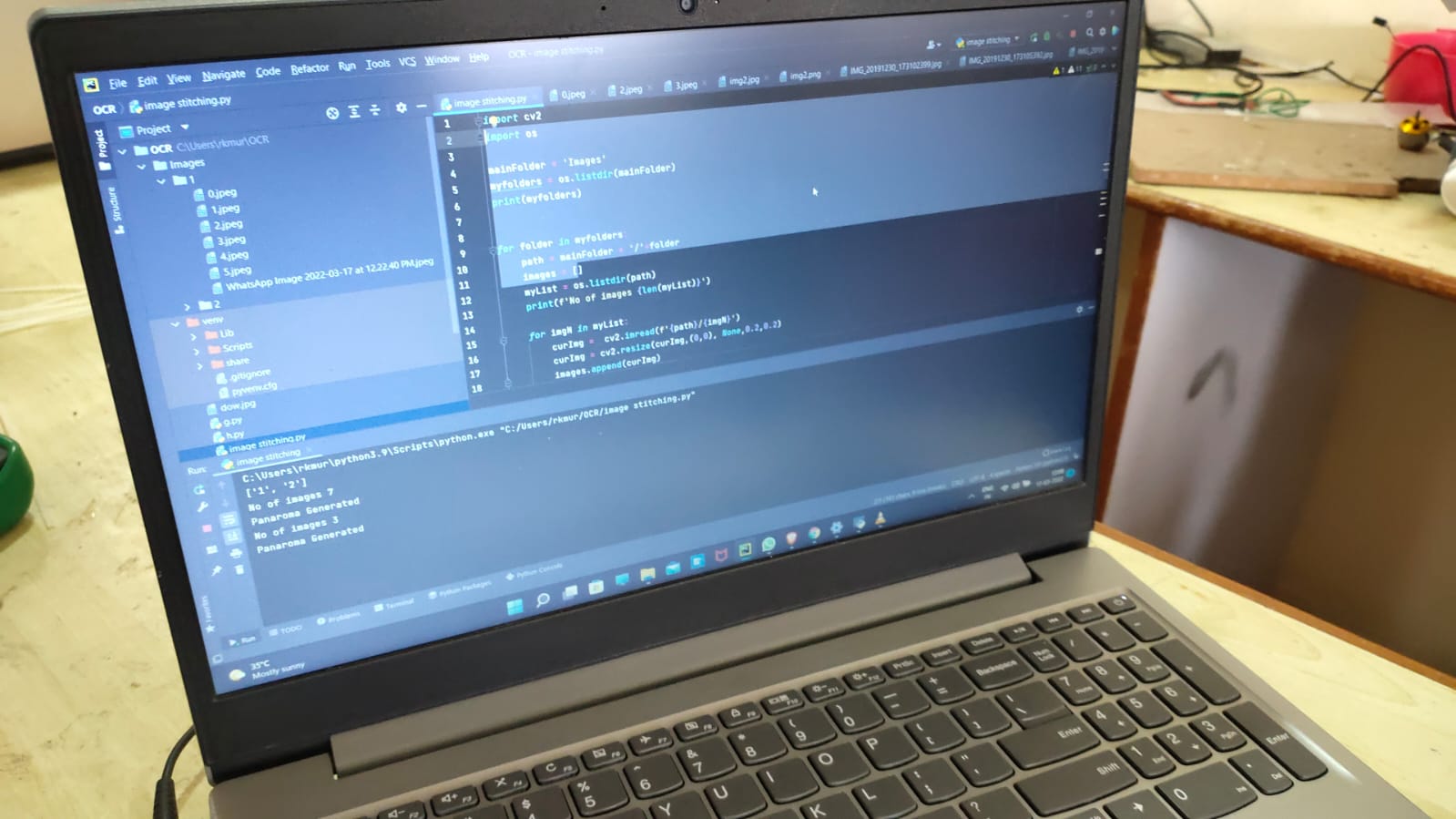
Image stitching (image processing)
-
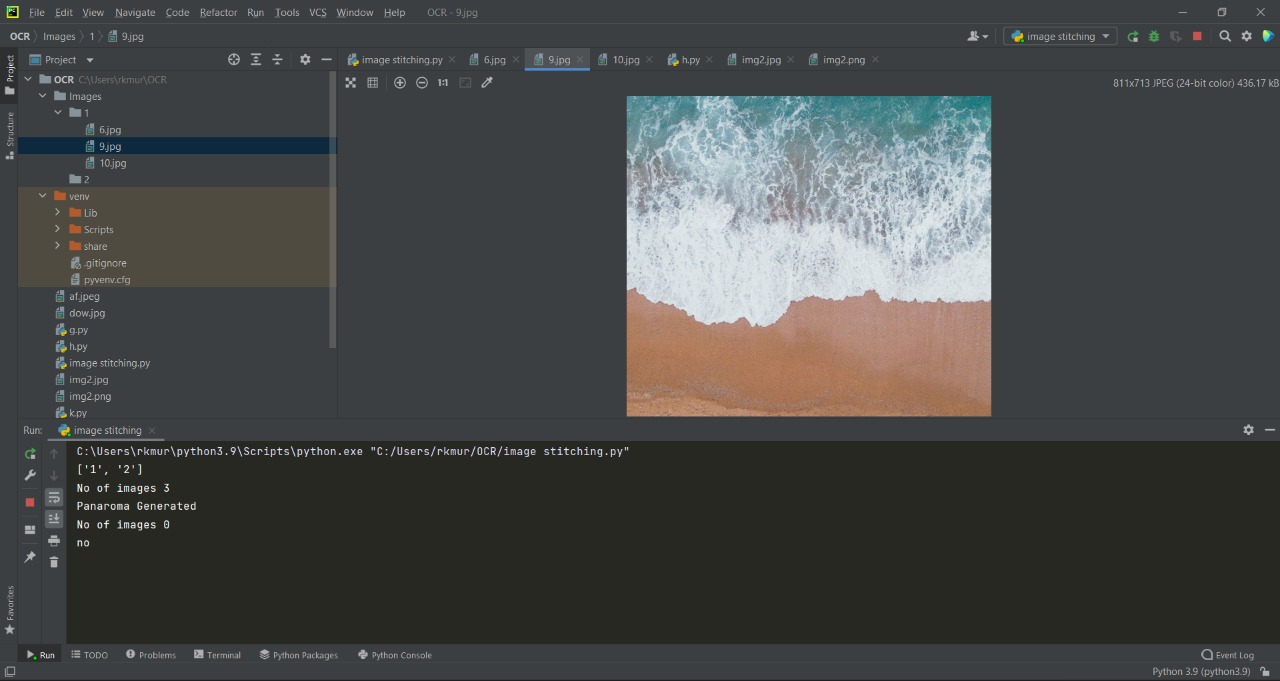
Data set taken from internet for image stitching
-
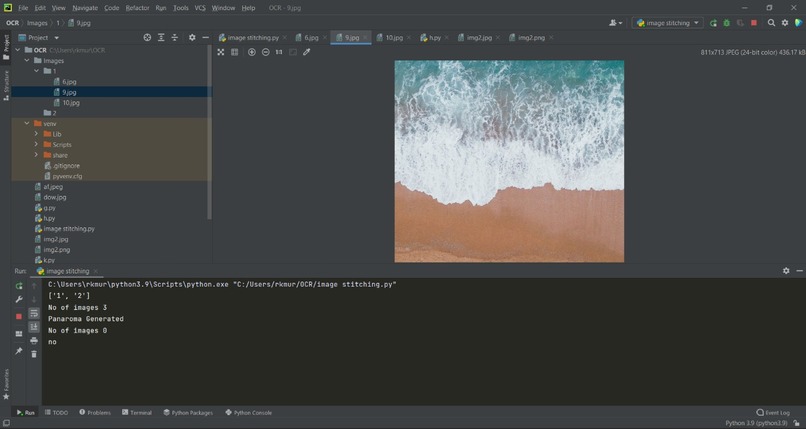
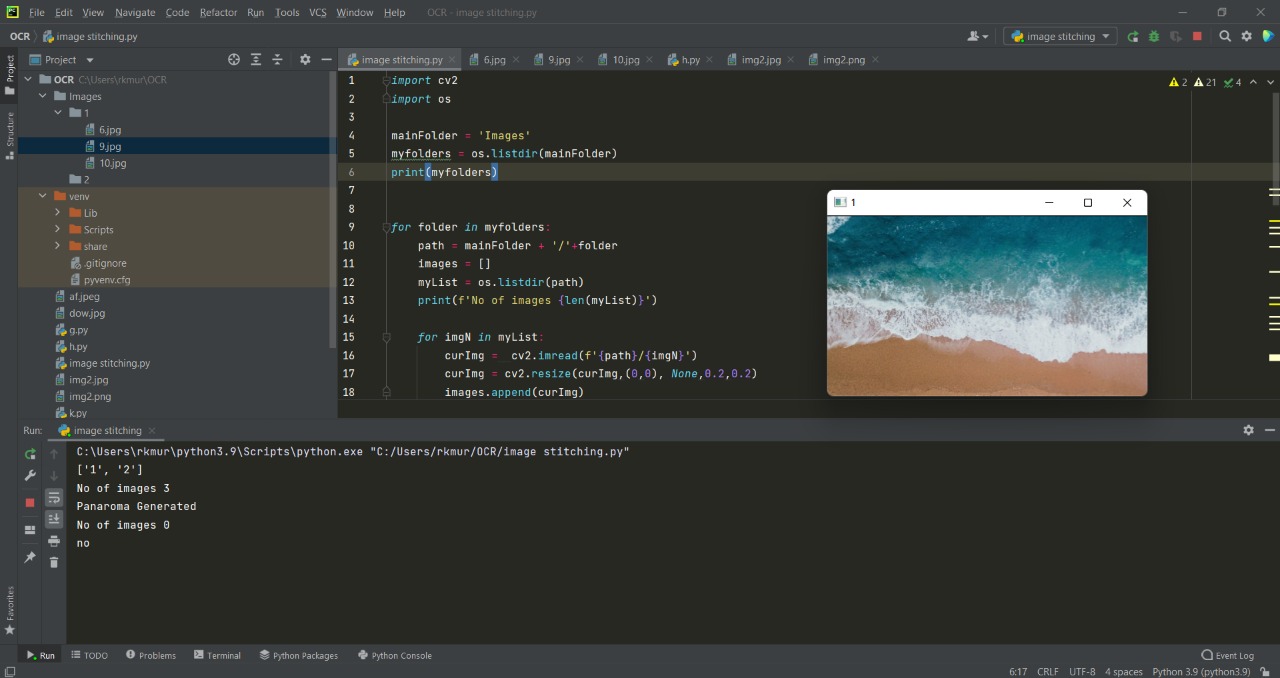
Result of Image Stitching (3 images are merged into a single image)
-

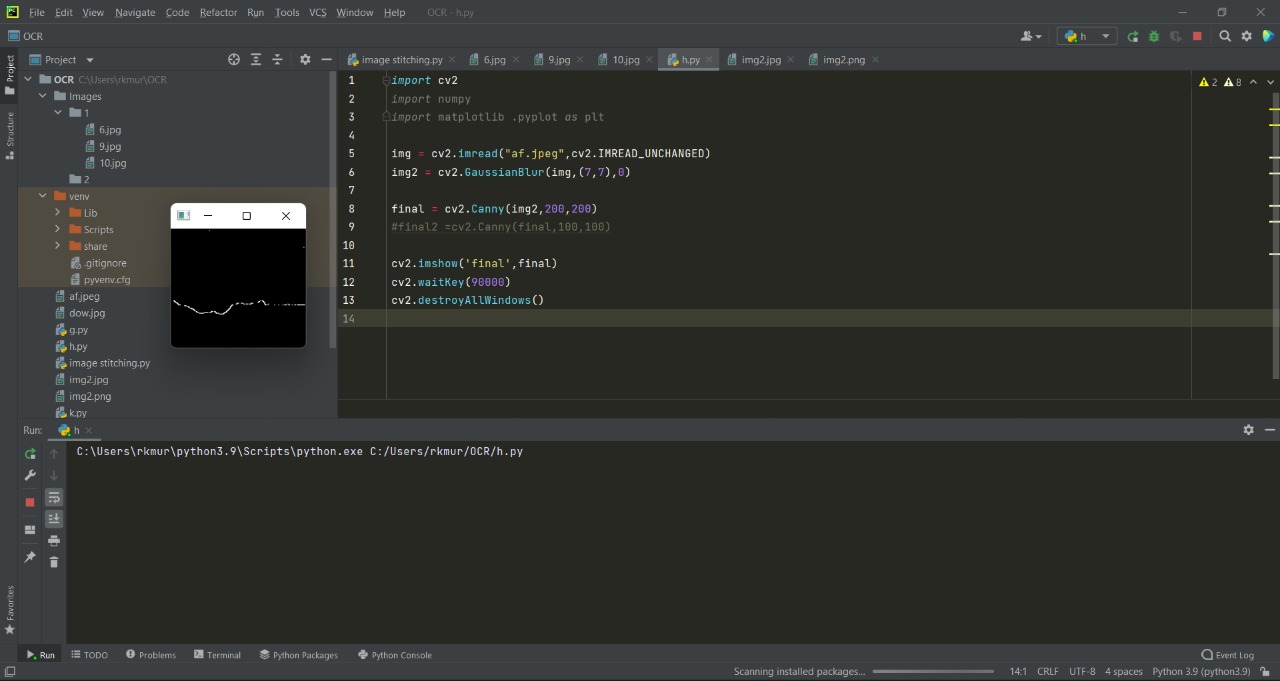
The merged image is processed and the tide line is marked.
-

Drone holds its position with the help of GPS
-
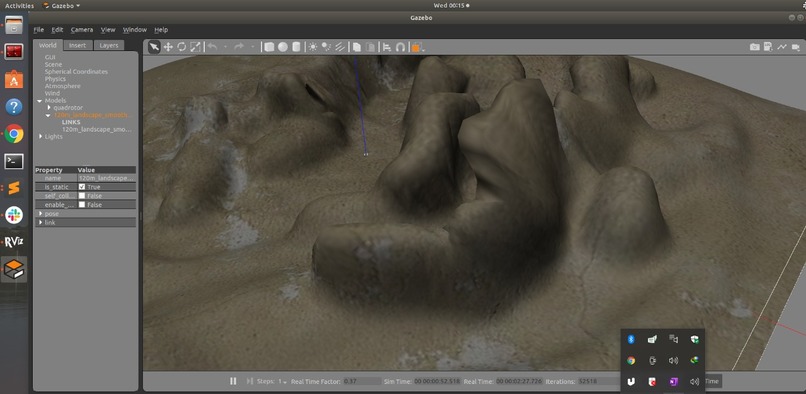
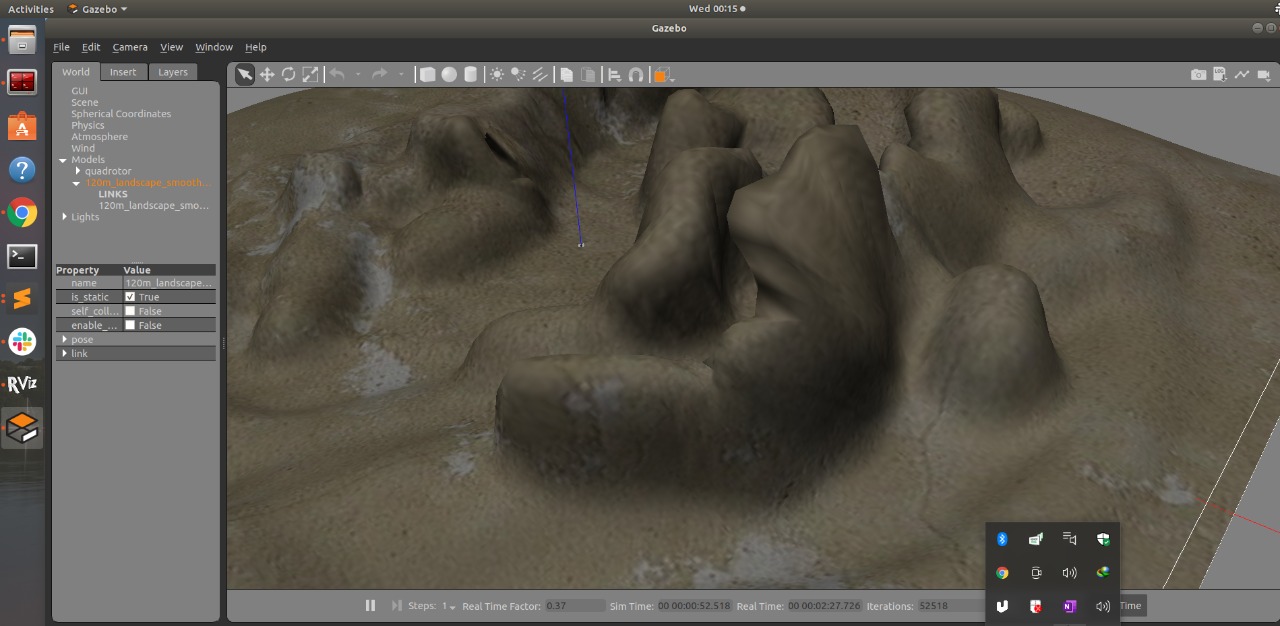
Mapping topography in ROS






Inspiration:
In a world of modern robotics, levels of tides are measured traditionally using tide gauges. Measuring the tidal waves at any beach from an aerial perspective would be helpful to predict the tide lines.
What does it do?
This drone is completely autonomous in a way that it can take off and land autonomously and executes the mission. This drone can be used for environmental assessment surveys, ship navigation, mapping coastal topography, marking tide lines, and can be used to find inflow and outflow of water to obtain tidal energy.
Marking Tide Lines and Mapping Coastal Topography
This drone is equipped with LIDAR, GPS, Thermal, and RGB cameras. This drone is capable of flying in low altitudes and is able to take aerial pictures of coasts. The images taken are merged using a process called Image Stitching. The merged image is then processed with Image Processing and the tide lines are marked using Edge Detection. The processed image is then overlapped with the topography obtained from the LIDAR using a process called Image Overlay.
Challenges faced!
We found it hard to separate the tide lines alone from the images during image processing. Therefore we had to use a combination of 2-3 filters to get the appropriate processed image and to separate the tide line. As we did not have live images, we had to take images from the internet. We could not afford a lidar. Therefore we are trying to get the point cloud data from the internet and process the cloud data to extract the 3D view of it.
Accomplishment
Successfully executed autonomous flight. Successfully landed on a landing pad. Merging multiple images into one to form a single image using image stitching. Successfully plotted the tide line using the merged image.
What we learned?
ROS
Autonomous flight
Image processing
Team Management
What's next??
Built With
- missionplanner
- ros
")
")
")

")
")
Log in or sign up for Devpost to join the conversation.