-

Myo Device
-
Spark Robot

Inspiration
Learning the ways of the force shouldn’t be only a skill that Jedi or Sith masters can acquire. Based on this idea, and the fact that the hackathon committee was borrowing some myo armband devices, we created a Java application utilizing some open source on GitHub to control a Spark fun robot.
Note: The open source utilized was from NicholasAsuart and it consisted on Java binding of the Myo Armband. https://github.com/NicholasAStuart/myo-java.git
How We built it
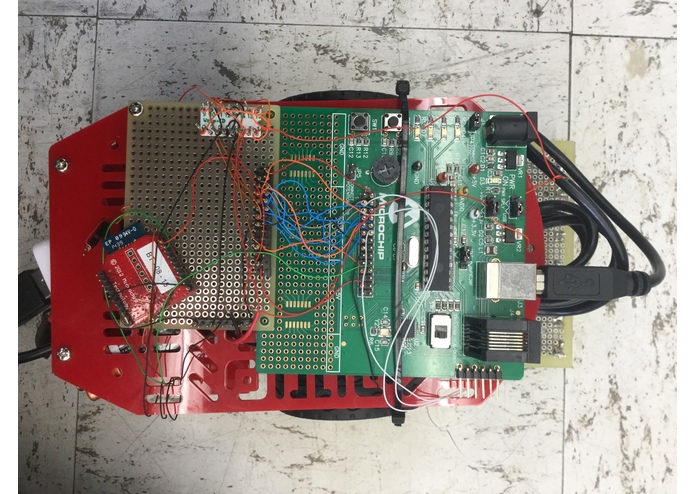
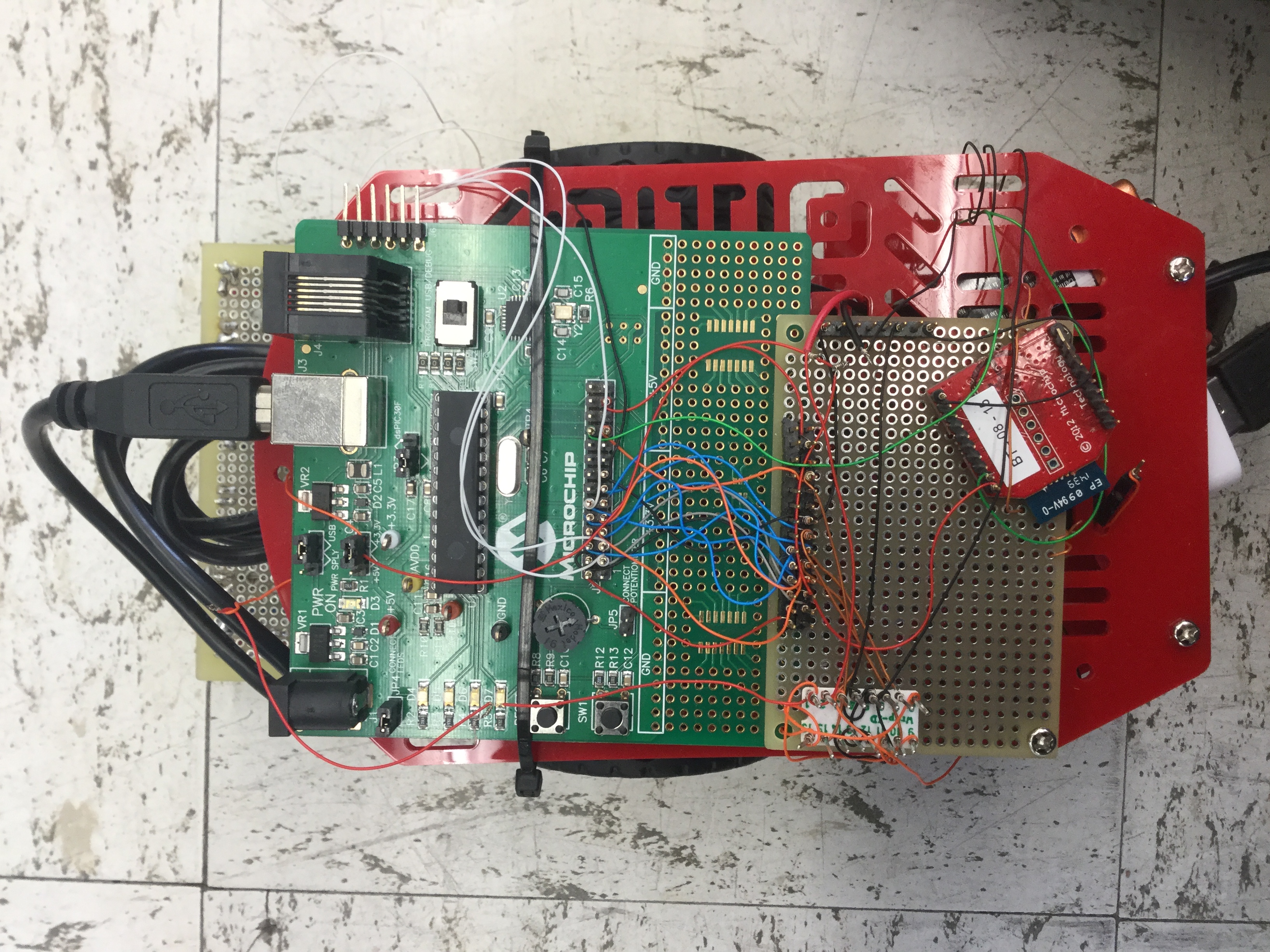
The robot was programmed using a PIC24F microcontroller. The microcontroller controlled the amount of voltage that went through the two little motors of the vehicle aided by an H-bridge. The microcontroller was also connected through a Bluetooth module to the computer. IT is important to emphasize the robot was build by us but prior the competition.
The main goal of the project was to send commands and/or instructions to a spark-fun robot without any joystick, or phone input. Instead, we design the application taking the advantage that Myo send data from muscle contractions to the computer easily. We then were able to analyze the data utilizing eclipse and Java and send the information bya serial communication to the Small robot.
Our learning
We discovered that being at a hackathon is nothing like being at a competition. It is the greatest place to learn, share, and build ideas with students around different campuses. We also learned that a team does not have to have all the resources to build something. In fact, what it really required is to have positive attitude and open mind, only then You can make stuff that you previously thought it was impossible to do.
What's next for HthonMPortControl
There is still much to do with HthonMPortControl. First, make it so you can control the speed of the spark fun robot. Secondly, create a GUI to display the gesture the user is doing utilizing the Myo device and action the vehicles takes after the gesture. Finally, we should add proximity sensors to the robot to prevent young padawans from crashing the vehicle robot.



Log in or sign up for Devpost to join the conversation.