-
-

3D printed parts
-
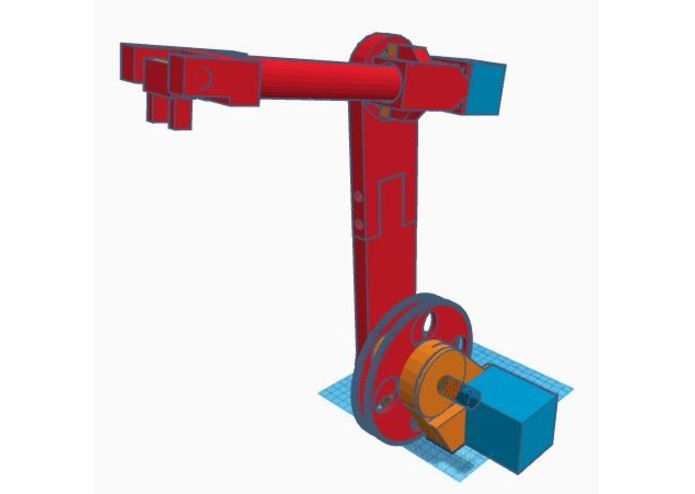
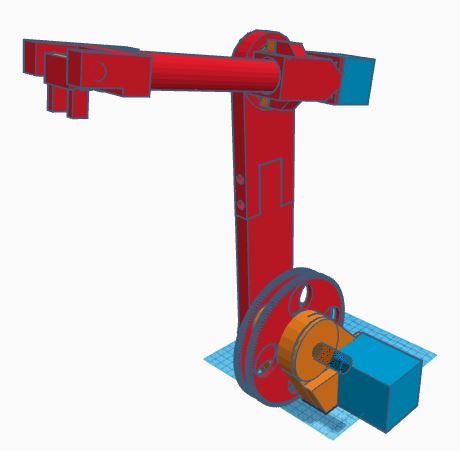
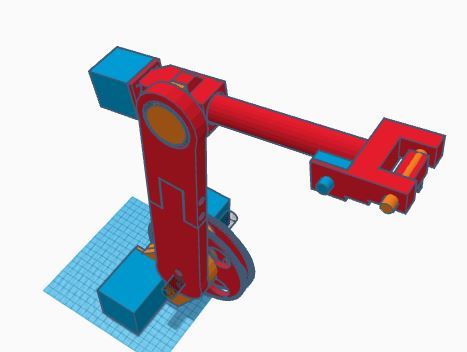
Robot in CAD
-

Nema Motors
-
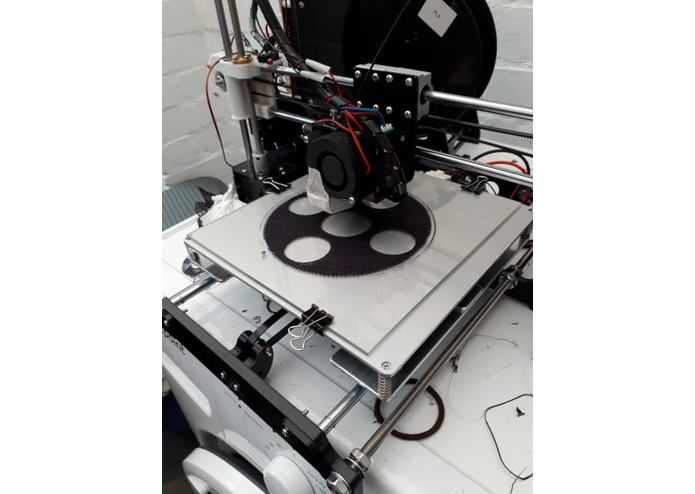
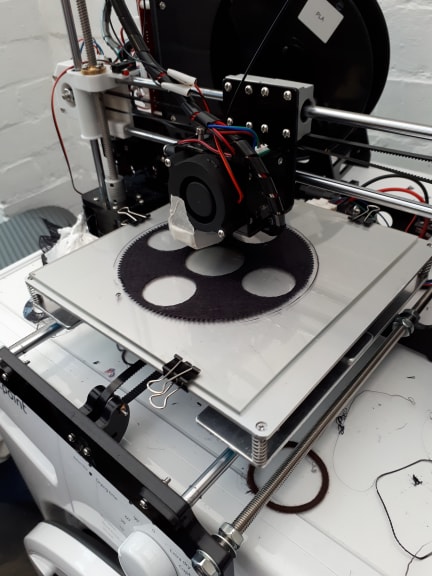
Gear being printed
-
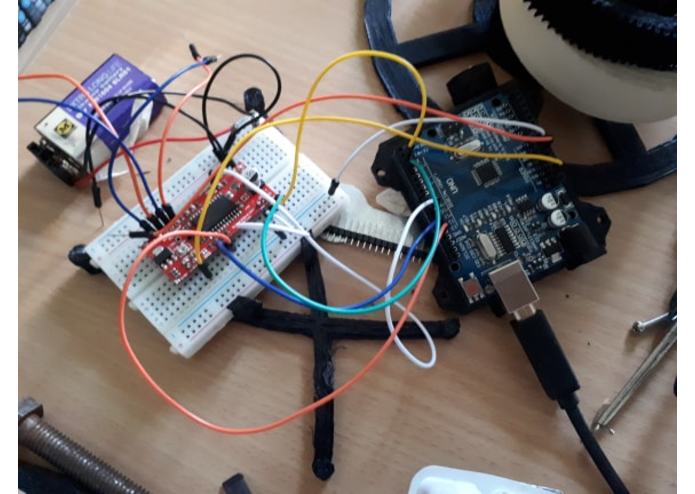
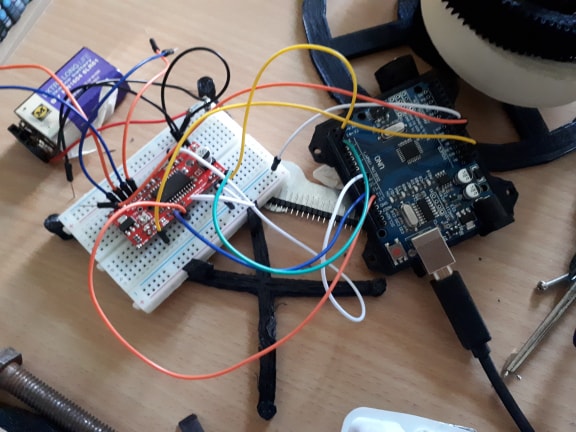
Arduino board and easydriver
-

Robot in CAD


Industrial robots - Expensive,Complicated,Limited function
Industrial robots improve every year. They become more powerful and more precise. However, their price is still very high and they are only available for big industrial factories. If you want to get a robotic arm for your home, your school, or your small company, you will have to spend between $20,000 and $200,000 and most companies will not even bother selling a robot to you.
Our goal is to make robotics accessible for everyone. For us, accessible means two things : low cost and user friendly. We have the dream that everyone can learn robotics and have a better life with a desktop robotic arm.
What it does
This robotic arm can be programmed to do just about any task or chore desired and the repeat them at the press of a button. HR2 will be an accessible 5 axis robotic arm, made for makers, education, and small companies.
The robot is 3D printed and powered by Arduino , being open source this means it can easily be shared with a community and makers can share code with each other , the opportunity for expansion is very large.
How I built it
The HR2 is inexpensive to build it uses an Arduino,Nema motors varying in power, Easydrivers for each motor and a small power-supply. Everything else is 3D printed and doesn't take long to put together ,Needle roller bearings slot into place and thrust bearings mean it can support heavier weights..It is designed using Tinker-cad - a 3D modelling software , this means parts can easily be edited and improved.
Challenges I ran into
The motors would be too expensive and large for practical lifting use ,therefore a gear up ratio of 9:144 about 1:16 is used to give the arm torque and still have enough speed to be efficient enough to perform tasks.
Accomplishments that I'm proud of
The calculated lifting weight is around 3.5KG on the base motor , meaning this should be able to out perform most desktop robots out there already.
What's next for HR2 - Robotic arm
The HR2 will now be improved further and possibly machined from metal. There will be improvements to the gear design and will use planetary gearboxes to give it more torque and a better design.
Built With
- arduino
- easydrivers
- nema-motors
- sparkfun


Log in or sign up for Devpost to join the conversation.