-
-
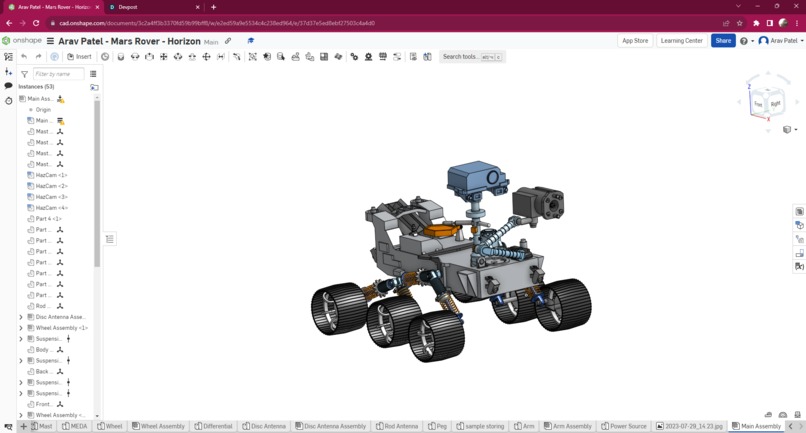
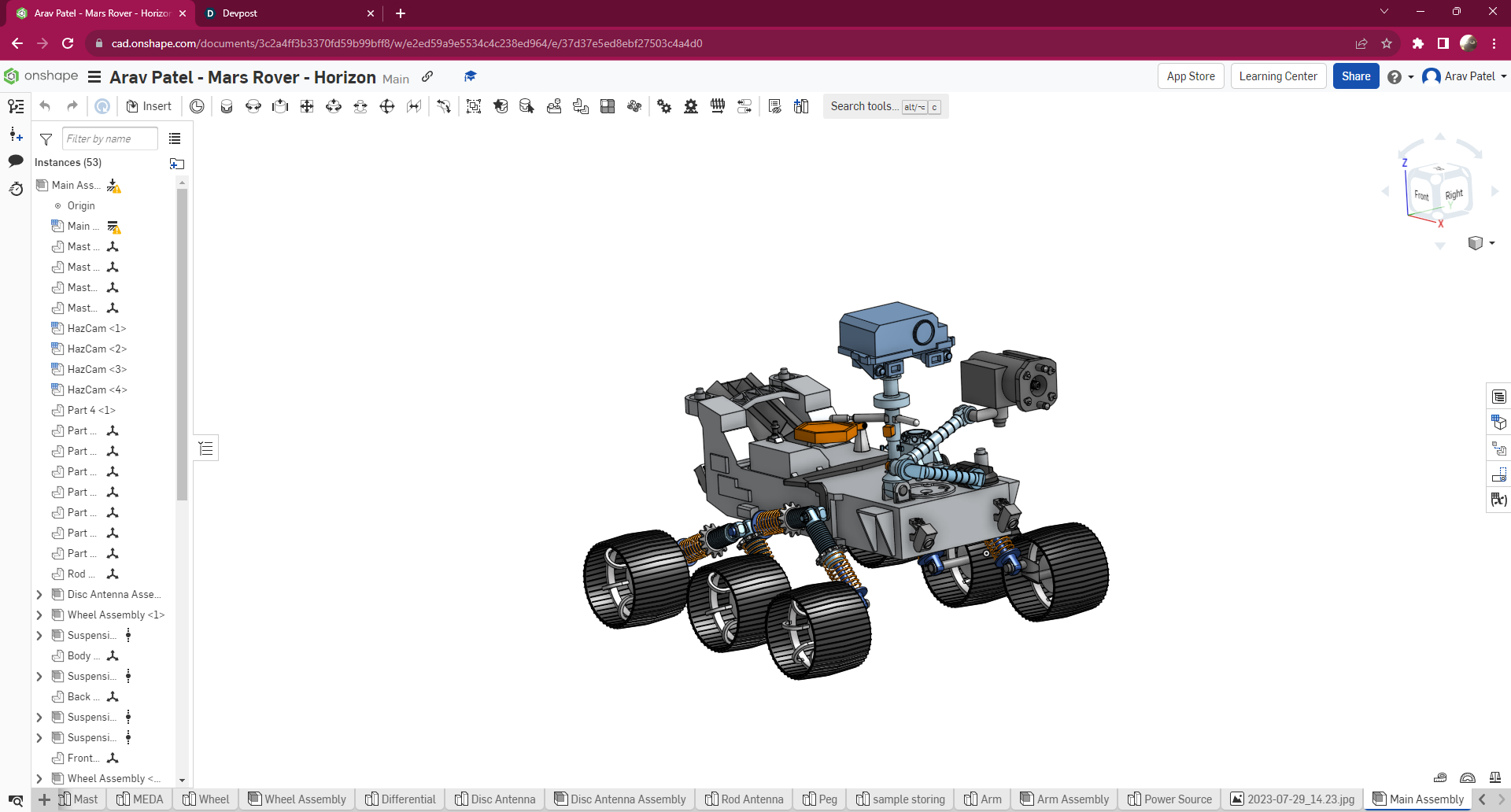
A 3D-Model of Horizon
-

Horizon's system Programming

Inspiration: When one of my friends told me about this Hackathon, my first thoughts were about coding a game, making a website, the common stuff. That is when I realized that I should do something more creative and stand out. I learned how to 3D-Model recently and I want to work for NASA in the future. I decided to relate my project to both and build a rover to explore Mars.
What it does: The rover I designed is capable of many things but most notably, it can take samples of Martian rock and soil (using its arm and drill), take photographs and videos of the landscape and sky (using its many cameras), gather data about the Martian atmosphere (using its MEDA systems), communicate with earth (using both of its antennas), and even more.
How we built it: The 3D-Model of Horizon was built using Onshape and not sleeping for the full 36-hour time allotment. The Video was made using Davinci Resolve and me still not getting a chance to sleep. The programming was done on Arduino IDE by Kartik who was somehow able to get a full 2 hours of sleep.
Challenges we ran into: From the programming perspective, figuring out the Ackermann steering geometry was hard since somehow it is not a well-explained topic on the internet. Nonetheless, after putting in 34 hours, I was able to figure it out. There were a lot of complex mate relations that took a lot of problem solving to figure out. I am not very familiar with video editing so it took a lot of learning and creativity to do effectively.
Accomplishments that we're proud of: The compilation of the program with no errors is an accomplishment that I am proud of. The program for the steering is complicated and requires calculations. Making a detailed and fully mated 3D model of a Perseverance style space rover. Also managed to edit together a video that I can be proud of with limited experience.
What we learned: I learned about new libraries: AccelStepper and ServoEasing. They work the same way a normal servo or stepper motor library works but it helps in creating smooth motion. I also learned about Ackermann steering geometry which is quite clever. It uses trigonometry to figure out the speed of each wheel on a turn so that the wheels do not slip. I learned about a lot of new mate relations and how to use them more effectively. I also learned a lot of new editing techniques that allow me to produce videos faster and at a higher quality.
What's next for Horizon: The way we have built the project allows us to add more features to it. The provision for GPS, weather detection, and receiving antenna signals are all there just have to be coded for. In the future, we could also use an experiment wheel design, currently, NASA is working on it, which uses a memory alloy. The wheel could take damage and come back to its original shape.
Built With
- arduino
- arduinoide
- onshape




Log in or sign up for Devpost to join the conversation.