-
-
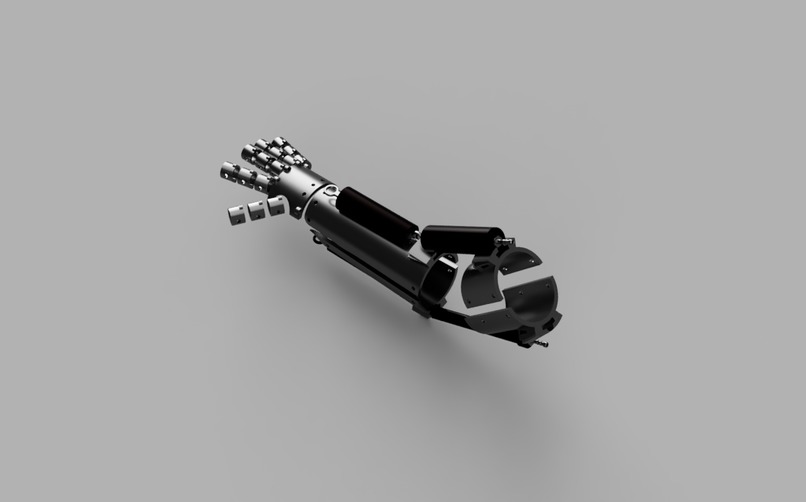
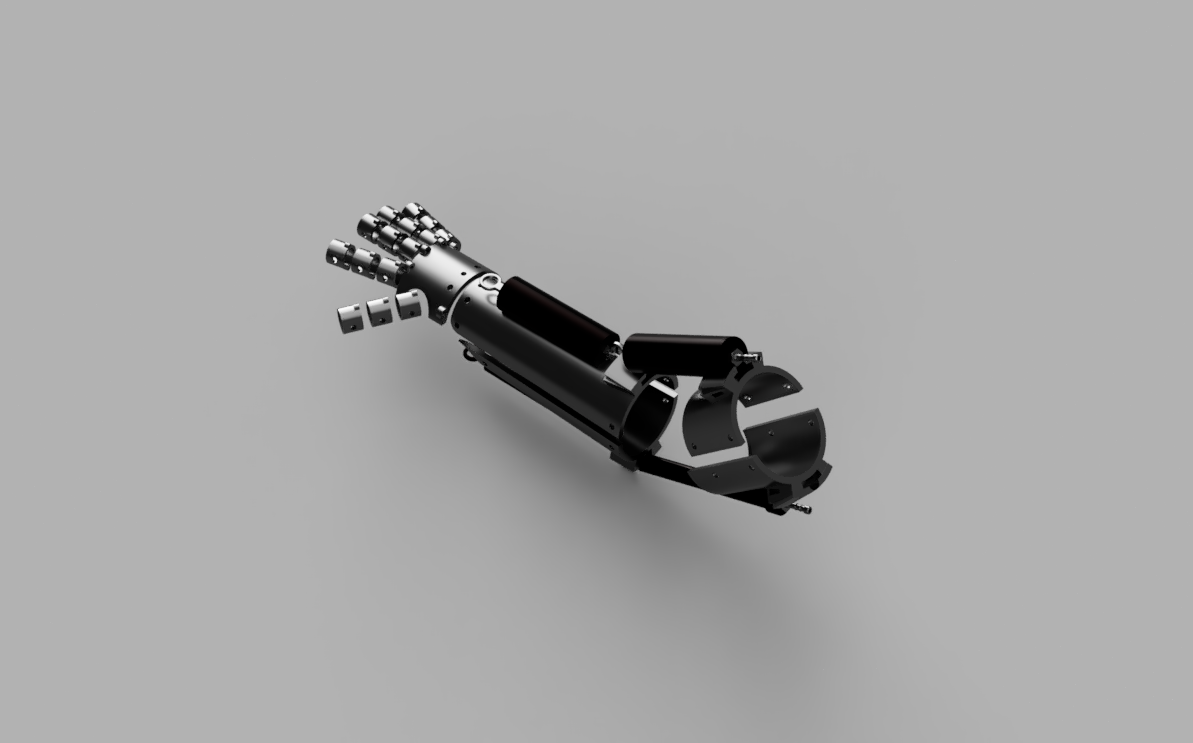
CAD Drawing
Inspiration
The inspirational behind this Project is Max, suffering with Muscular Dystrophy. Our intention was to make an economical product as an exoskeleton aid when compared to those available in the marketplace to make a complex product as this easily accessible and ultimately helping Max and people like himself with a small aid in their everyday lives.
What will it do
This is a wearable hand and arm robotic exoskeleton for assistive movements. Whenever the user tries to make a movement using their finger or arms, the tension in the string is amplified this assisting in common tasks life lifting, dropping,etc.
How will we build it
We built it using an EMG sensor which measures the electric signals generated by muscles. This is then received by a Raspberry api and it commands the Solenoid valve to let air into soft rubber muscles. These muscles contract and pull the string attached to it which in turn results in an amplified motion due the tension in the string. This is the hardware component. For the software component, we’ve planned to build an API to set up a flask app behind apache server and do route forwarding to make it accessible from anywhere.
What's next for Hope/22
The application for Hope/22 can be expanded to different body parts and to different economical areas to serve different purposes.


Log in or sign up for Devpost to join the conversation.