-
Uploading File Pt. 2
-
Home
-
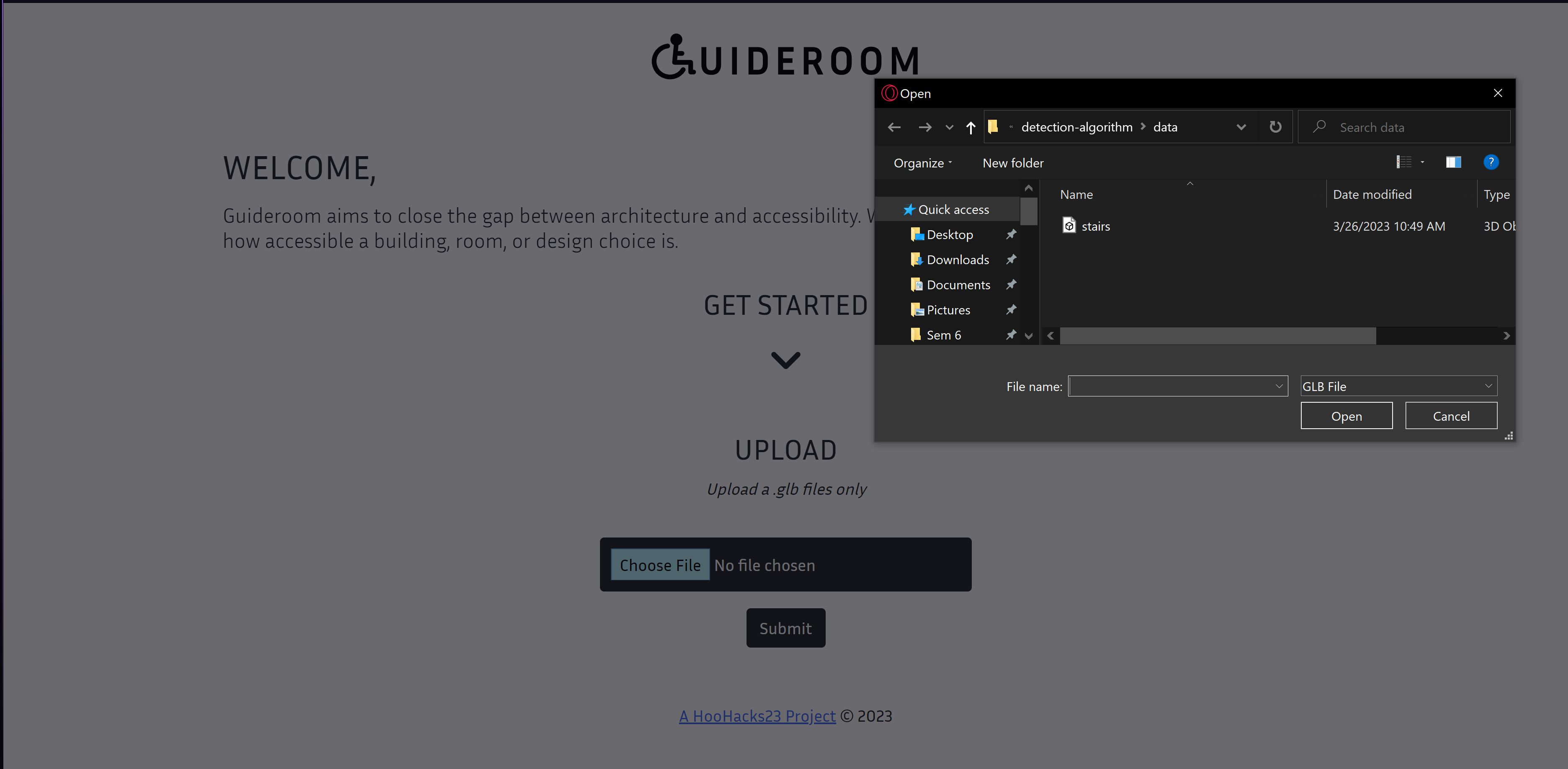
Uploading File
-
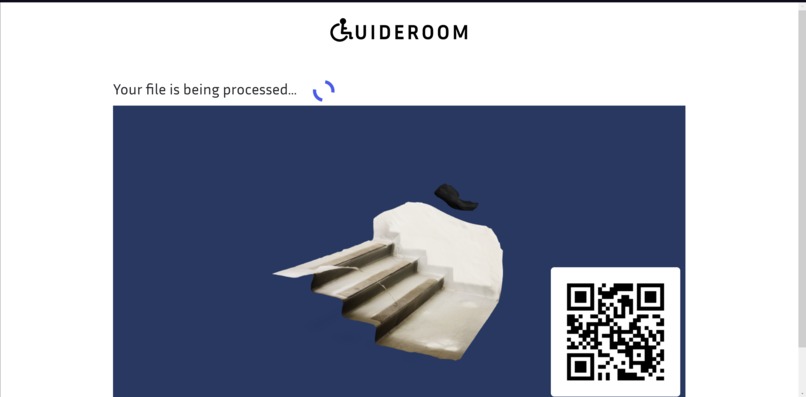
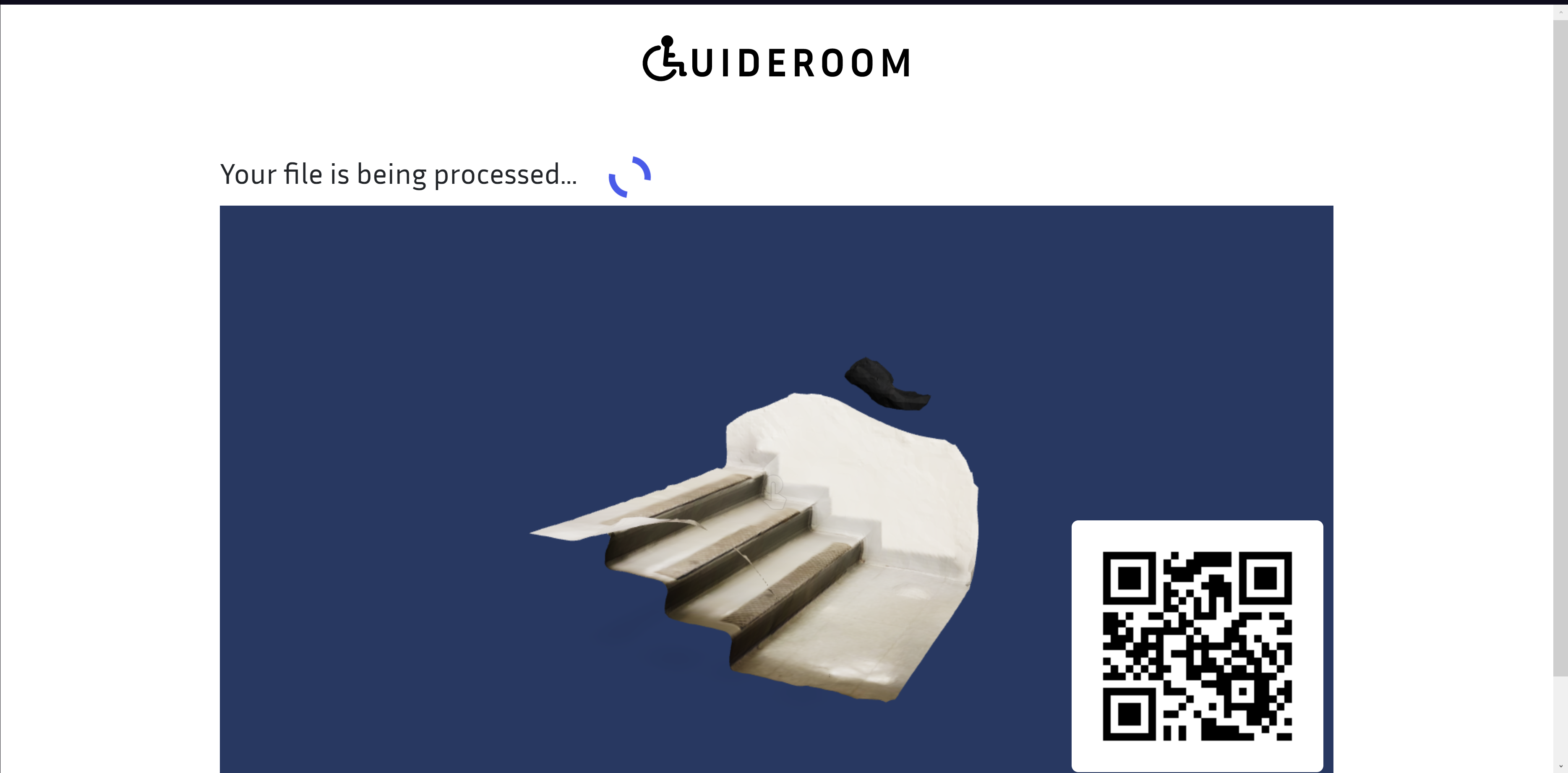
File Processing
-
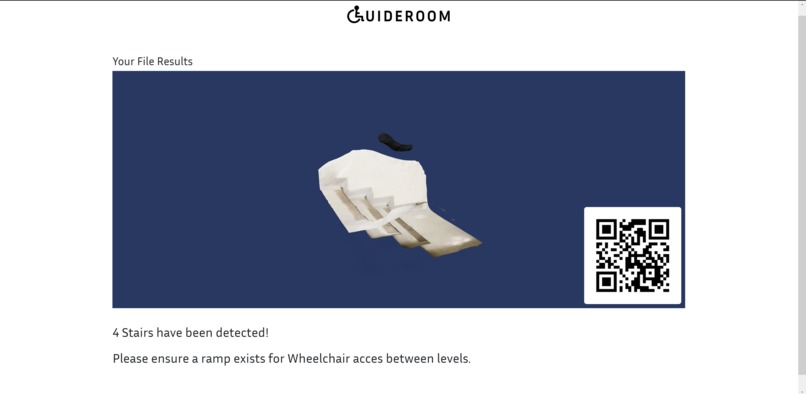
File Results


GUIDEROOM
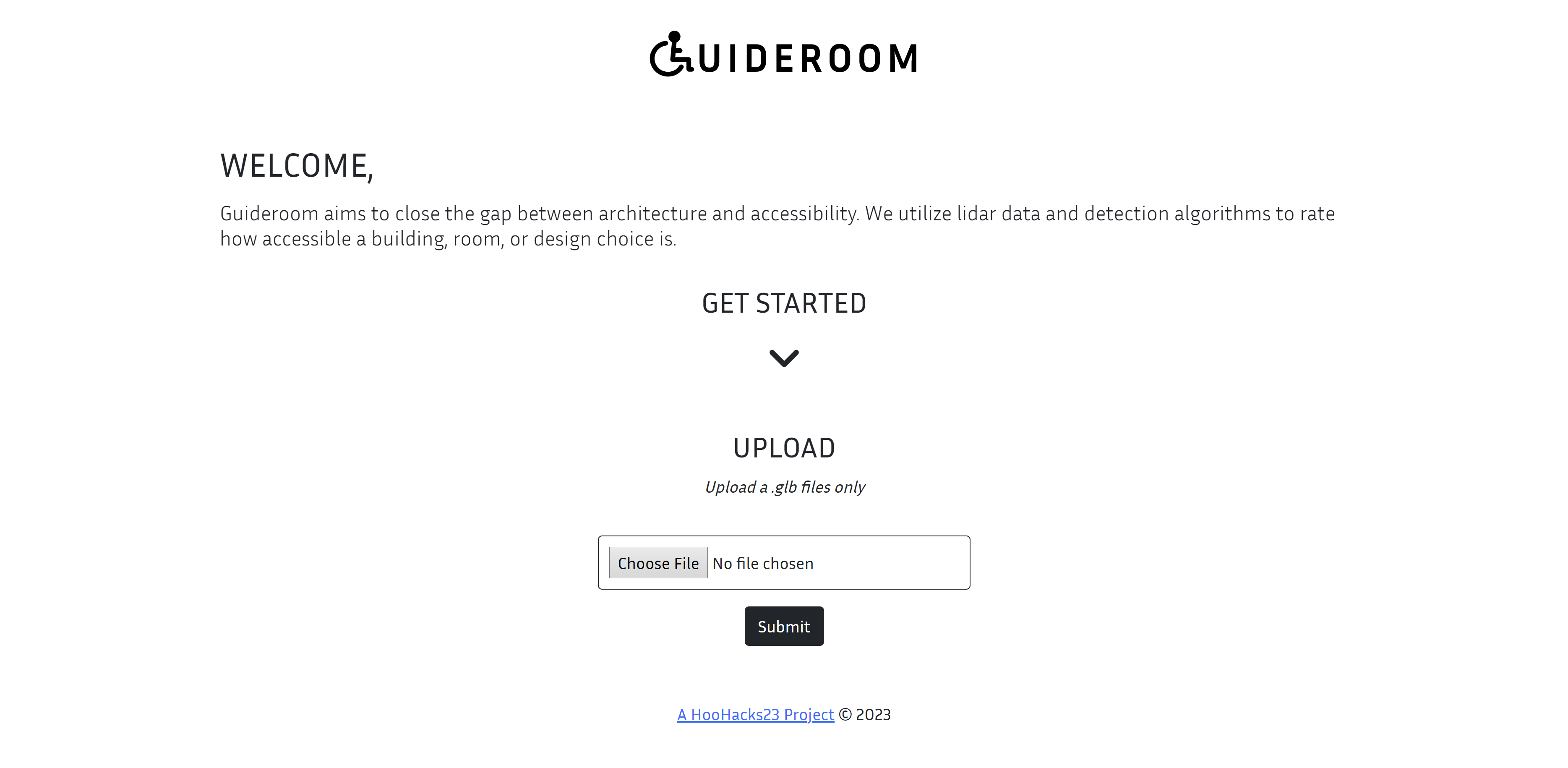
Guideroom aims to close the gap between architecture and accessibility. We utilize lidar data and detection algorithms to rate how accessible a building, room, or design choice is.
Why? As Accessibility becomes a more prominent focus in the design of everyday things, we wanted to take on the perspective of accessible architecture, as we notice that some the classrooms we frequent daily are not up to accessibility standards for our peers. 3D modeling sensors and equipment can be very expensive, so we decided to use a more widely available (in an education context) iPad, more specifically the iPad Pro which is equipped with a LiDAR sensor.
We used the LiDAR scanner on the iPad and compatible App, PolyCam, to take various scans of our surroundings. We then exported these scans as point clouds and used the Echo3D cloud service to host our scans for the web app. The Web App is built in the front-end using React while a Python backend server was built using Flask. The Web app is a simple and easy to follow user interface that allows a user to upload a .gbl file ( that can be exported from the previously mentioned iPad App) and it then uploads this file to the Echo3D cloud service and displays a scene viewer of said file. While the file is processing, the backend runs algorithms that run numerous calculations on the point clouds to detect floors, detect stairs, count stairs, and analyze plane surfaces. These results are then displayed on the same page once the processing is complete.
Our final product was a few goals short than our initial intentions. Properly learning the documentation to host our files, understanding the mathematics behind point cloud analysis, and trying to host our backend server all presented challenges towards our time and success. Despite this, we quickly determined what actions were not feasible and changed plans. We were unable to find an acceptable hosting service for our python backend, so we opted to have the local run the algorithms instead to focus on our algorithm improvements. Finding suitable architecture designs to scan and test on was a bit of a challenge as we would have wanted both inaccessible and accessible design, but gathering data and waiting for it to process took time, as well as scoping out locations for feasible scans.
In the future, we would like to further improve the algorithms to more accurately gather measurements and make proper inferences based on accessibility. We are proud with our achievements in properly detecting the most important features of a room that indicate accessibility and would like to add to this with Ramp detection, Desk Heights, detecting various furniture, etc.

Log in or sign up for Devpost to join the conversation.