-
-
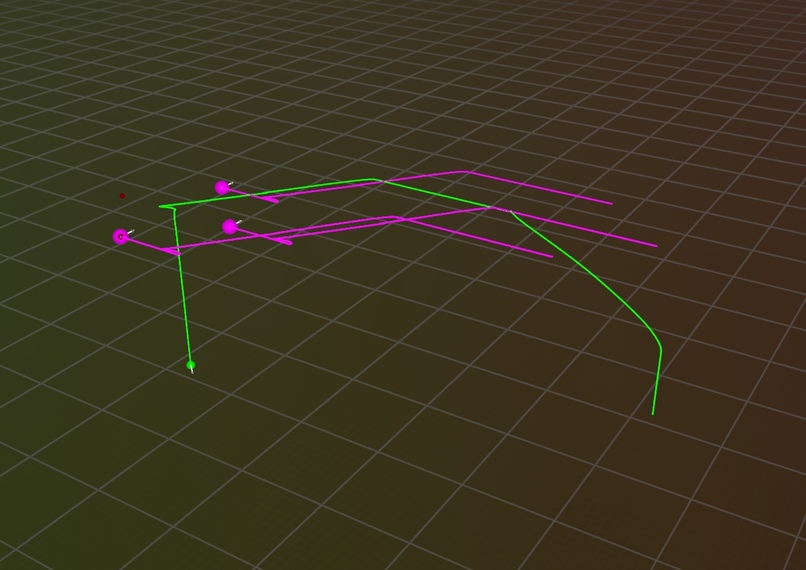
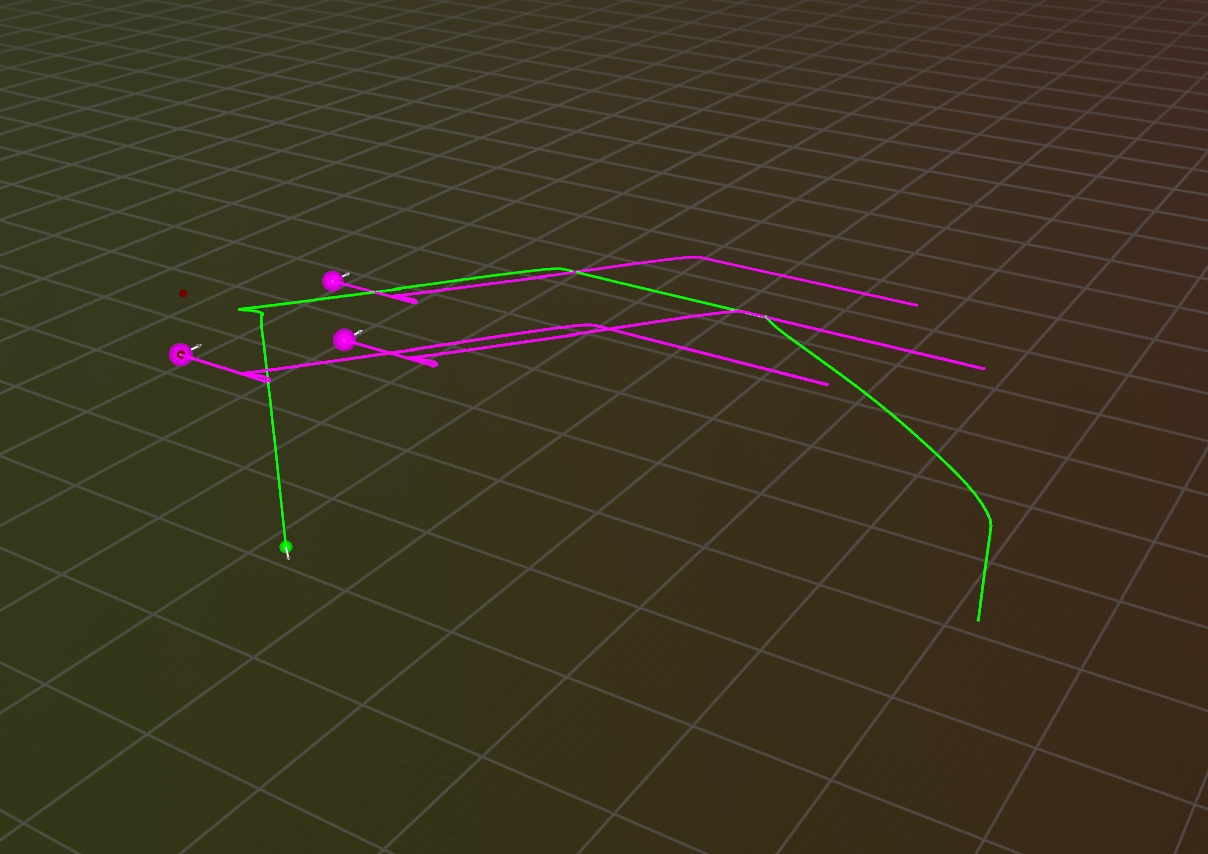
drone motion in 3d
-
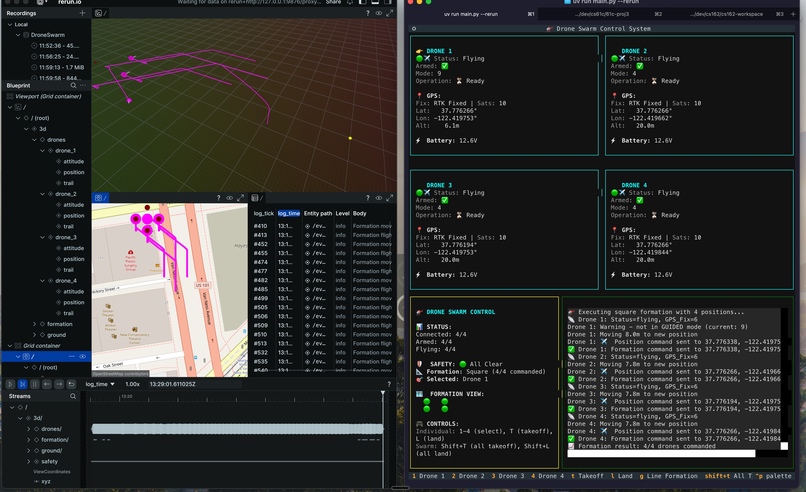
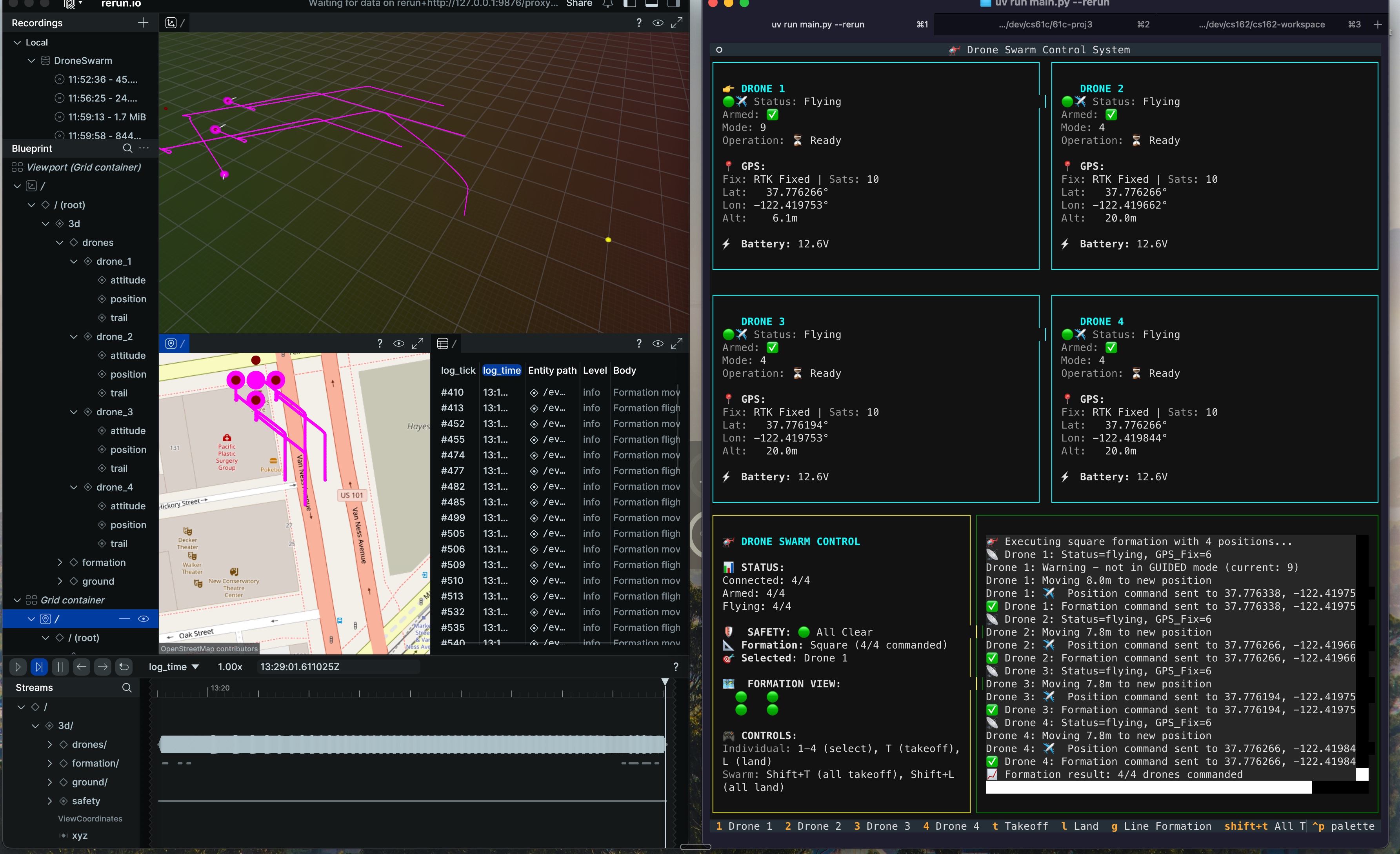
full dashboard
Inspiration
Watching drone light shows at events, we realized that coordinating multiple drones requires expensive, complex software that's inaccessible to researchers and hobbyists. We wanted to democratize drone swarm technology by creating an intuitive system that makes controlling multiple drones as simple as playing a video game.
What it does
HiveMind transforms drone swarm control from complex scripting into intuitive real-time interaction. Users command any number of drones simultaneously through WASD movement controls, execute dynamic formation patterns that automatically adapt to the swarm size, and monitor everything through dual interfaces: a live terminal dashboard and immersive 3D visualization with world map integration.
How we built it
- Python + Textual for the responsive terminal interface with live telemetry displays
- Rerun SDK for dual-pane 3D visualization (local coordinates + world map)
- MAVLink protocol for real drone communication and ArduPilot SITL simulation
- Scalable Docker deployment for any number of drone simulators
- Threading architecture for concurrent management of unlimited drones without blocking the UI
- Dynamic formation algorithms that calculate optimal geometry for any swarm size
Challenges we ran into
The biggest challenge was creating a system that scales seamlessly from 1 to 100+ drones while maintaining responsive UI controls. We also struggled with GPS coordinate transformations—ensuring all drones maintained accurate relative positions when moving formations across Earth's curved surface, regardless of swarm size.
Accomplishments that we're proud of
- Gaming-style controls for professional drone operations (WASD movement)
- Infinitely scalable formations that automatically optimize geometry (1 drone = point, 2 = line, 3 = triangle, 4+ = dynamic polygon)
- Dual visualization showing both 3D spatial relationships and real-world GPS positions
- Zero-lag emergency stop that can instantly land entire swarms of any size
- Professional safety systems with collision avoidance and separation monitoring across all drones
What we learned
Drone coordination is incredibly complex behind the scenes, but the user experience can be made beautifully simple. We discovered the importance of threading architecture for real-time systems and gained deep appreciation for GPS mathematics. Most importantly, we learned that good software can make advanced robotics accessible to everyone.
What's next for HiveMind
- Stress testing with 100+ drone swarms to validate scalability limits
- AI-powered formations that adapt to obstacles and wind conditions at any scale
- Mission planning with waypoint navigation for massive swarm deployments
- Real hardware integration with physical drone fleets
- Open-source community to democratize large-scale drone swarm technology
Built With
- ardupilot
- drones
- flyby
- python

Log in or sign up for Devpost to join the conversation.