-
-
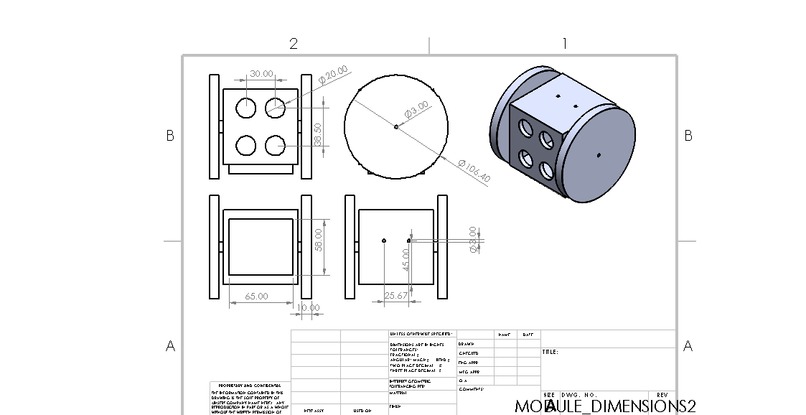
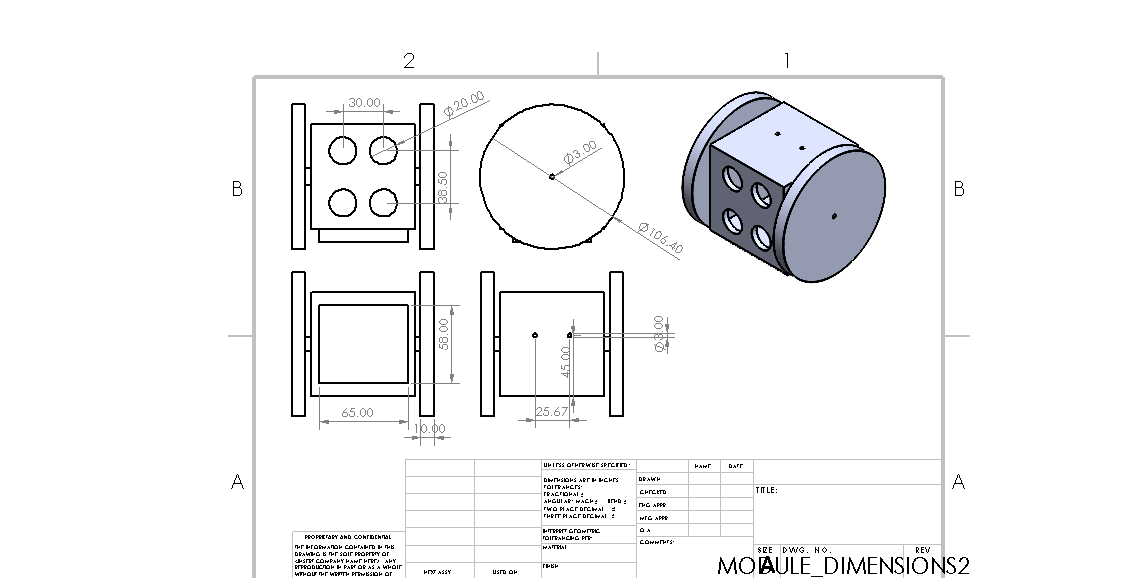
Module Blueprint (Spec Sheet)
-
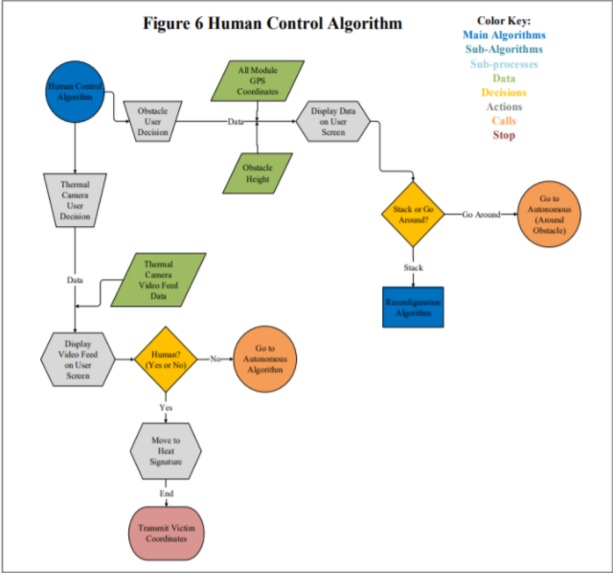
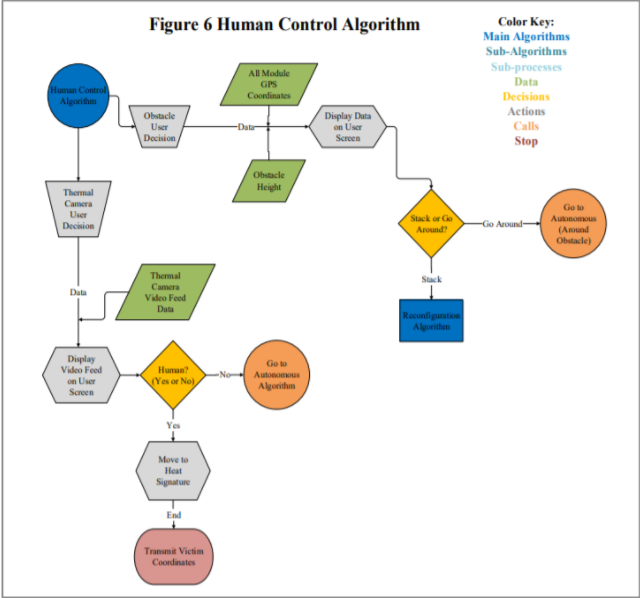
Human Control Algorithm Flow Chart
-
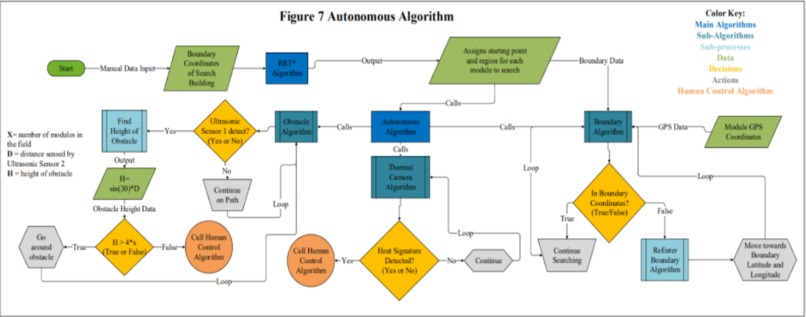
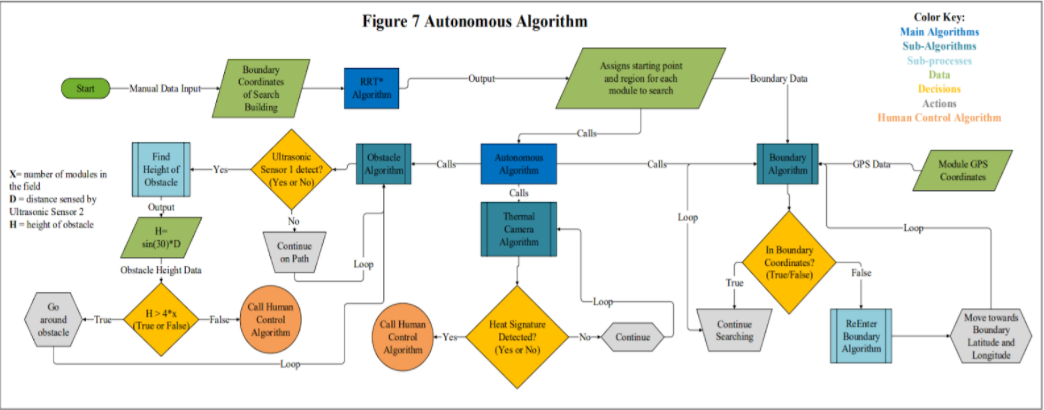
Autonomous Algorithm Flow Chart
-
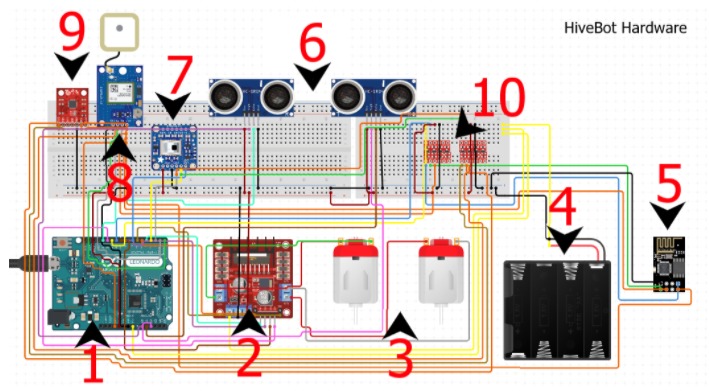
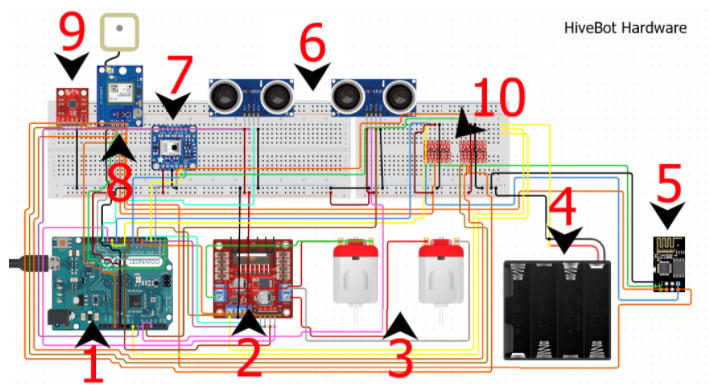
Hardware Schematic
Inspiration
Every individual bee in a honey bee colony has a simple task to perform, but together, they are able to accomplish complicated tasks such as building nests and collecting food. The dynamics of this hive inspired us to explore the concept of self-reconfigurable robots for the application of urban search and rescue.
What it does
Our robotic solution is a cross between swarm robots and self-reconfigurable robots, having the ability to move and accomplish tasks independently, as well as connect to each other to achieve complex movements. The system will use centralized communication to assign tasks and use decentralized communication to execute pre-programmed algorithms and make autonomous decisions. The modules will consist of wheels with electromagnets that allow for reconfiguration and specialized sensors to detect survivors in collapsed buildings.
How we designed it
We used Solidworks to create prototypes of our modules, created an Arduino hardware schematic using a circuit software that detailed how we integrated ultrasonic sensors, thermal cameras, GPS locators, and gyroscope sensors into each of our modules, and created architecture for our human control and autonomous algorithms.
Challenges we ran into
We struggled with creating a design for our reconfigurable mechanism and went through three different iterations before concluding that a combination of electromagnetic and magnetic rimmed wheels would be a plausible solution. It was also a challenge to make our modules adapt to an ever changing environment where obstacles are always present. To solve this, we created a compact module with numerous sensors for autonomous capabilities.
Accomplishments that we're proud of
We are proud of our design of the exterior shell of modules which allow for rotation of the wheels without moving inner hardware during reconfiguration.
What we learned
We learned about centralized and decentralized communication methods and how modules could make decisions autonomously. We also learned how to design compact robots that have the same complexity as a robot that is large and expensive.
What's next for Hive Bots: Reconfigurable Modules for Urban Search & Rescue
We plan to create this project using PCB boards to increase the compactness of the robot and experiment with different magnets to find the most efficient magnetic material. We hope to introduce this into the field and experiment with its capacity for adapting to different environmental obstacles.
Built With
- multisim
- python
- solidworks
- vizio


Log in or sign up for Devpost to join the conversation.