-
SLIDES: https://docs.google.com/presentation/d/1GTrO2qd3JkY_V_flaYqSfQX5de9NxZpVgjqbuZMYZnw/edit?usp=sharing
-
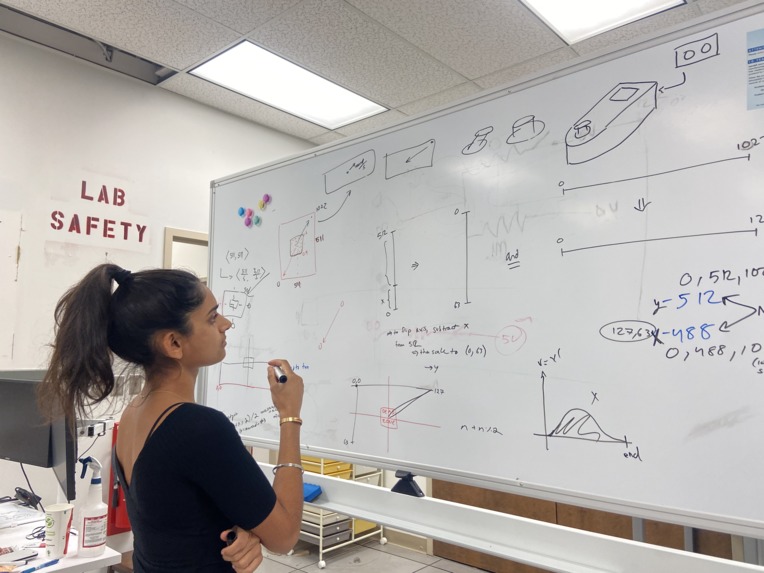
Shilpa mapping out the joystick to oled math
-

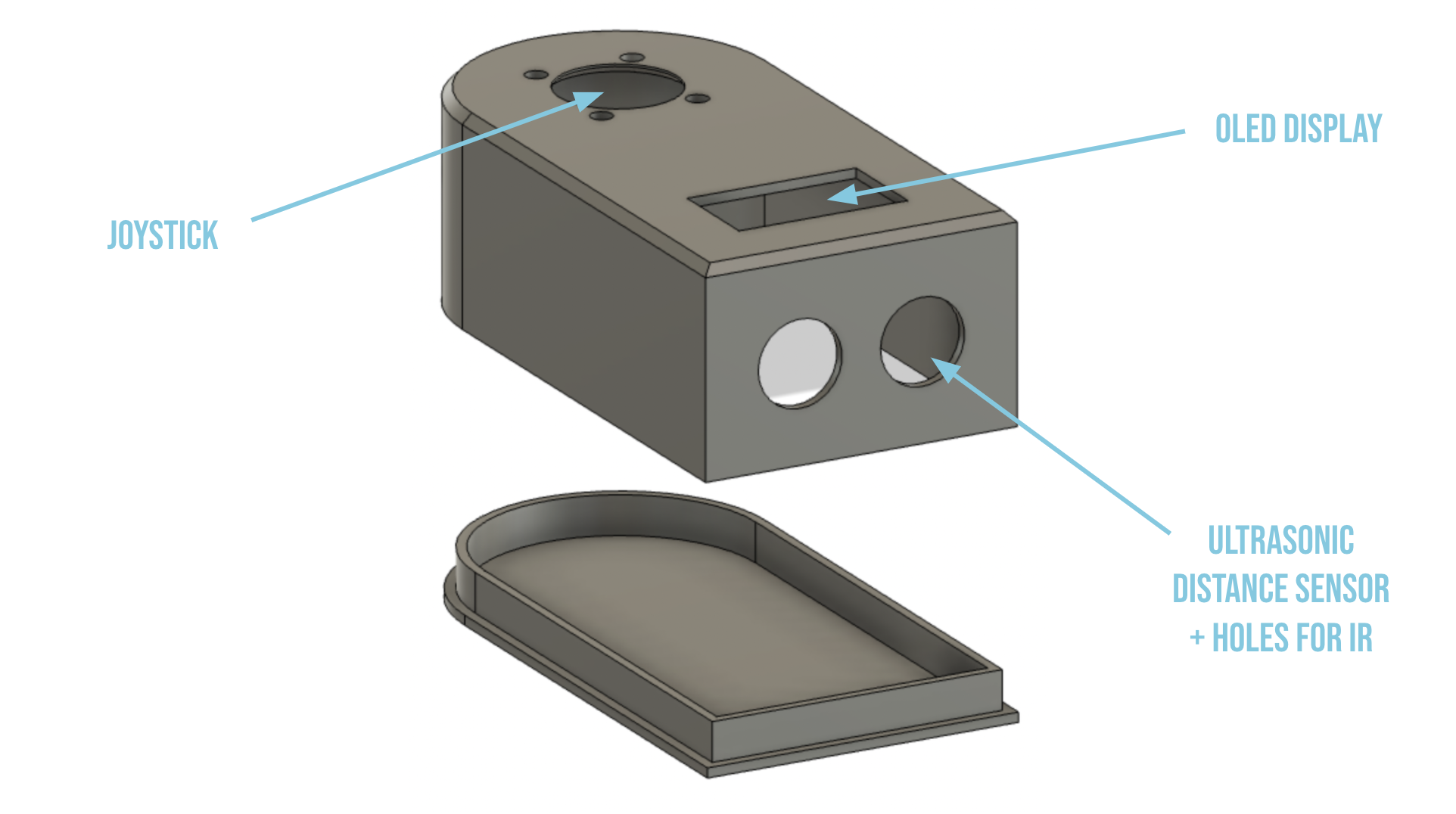
CAD for the housing of our device
-

Courtney hacking away at the CAD, and earlier, the oled display
-
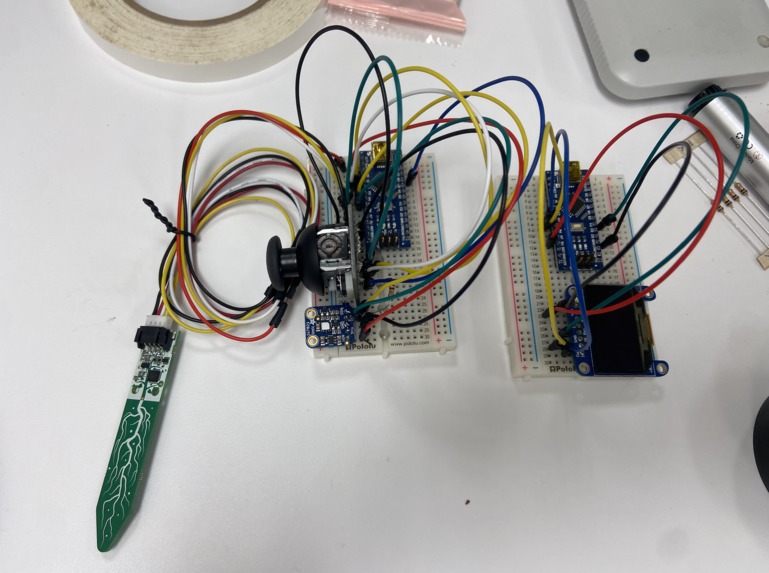
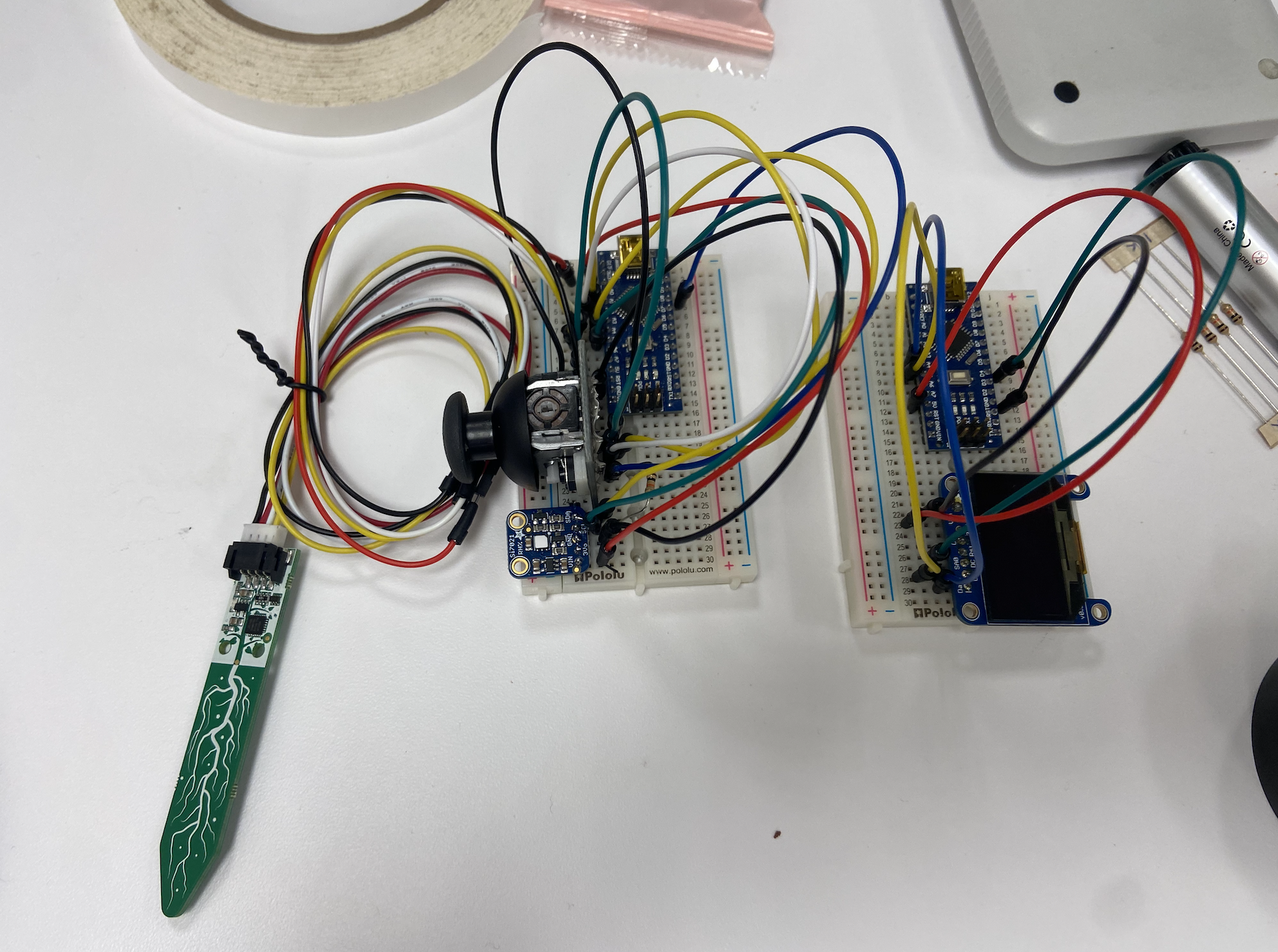
Testing our sensors
-
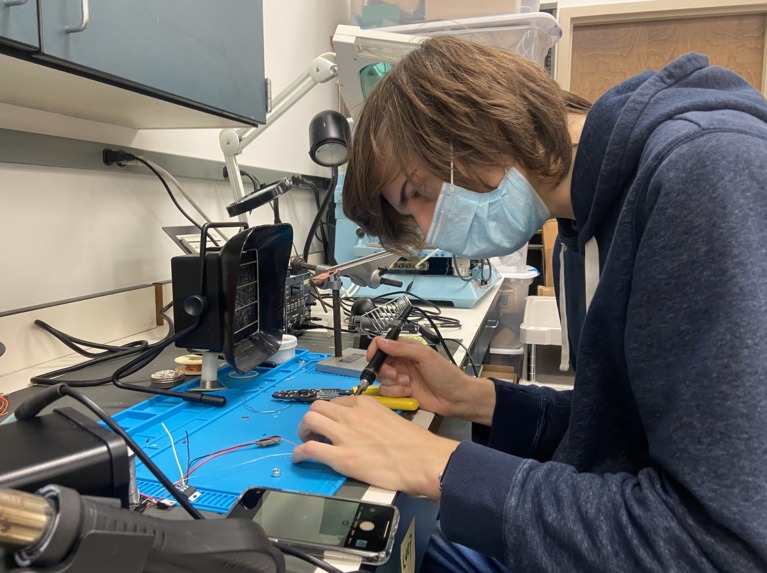
Brady working on our communications system


View Our Demo Slides
https://docs.google.com/presentation/d/1GTrO2qd3JkY_V_flaYqSfQX5de9NxZpVgjqbuZMYZnw/edit?usp=sharing
Inspiration
Growing up in California, we've lived through the adverse affects that out-of-control wildfires can have on our daily life. Governmental failures to prevent these natural disasters before they start, and a lack of funding for the preventative field, inspired us to approach the problem from a business standpoint. We asked ourselves - how can we inspire the industry to tackle this problem?
What it does
Our solution to this problem came in the form of a disruptive navigation technology. Hiker Helper is aimed to prioritize safety and robustness, but minimize cost. We utilize a mesh network of sensors placed throughout an outdoors area, communicating in tandem so that a lost hiker may navigate back using our handheld device. The selling point, and therefore incentive to distribute, our technology, is the wildfire prevention component of our project. We've effectively devised a much lower cost solution to stop wildfires before they begin by robustly monitoring an area with a variety of environmental sensors.
How we built it
We separated our system into two components: the Hiker Helper handheld device, and the Base Station ground sensing system. The Hiker Helper contains an Oled display and a joystick, which create a sleek UI that allows the user to send and receive full-sentence messages. The Hiker Helper also has a temperature and humidity sensor, which serves as an extra asset for our wildfire prevention data collection. The Base Station contains an ultrasonic distance sensor, which we use to detect brush height, interpreted as potential kindling for a wildfire to begin. It also contains a temperature and humidity sensor and a soil moisture sensor (measured in capacitance). The two communicate via bluetooth.
Challenges we ran into
The major challenge we ran into was that our original mesh networking plan, which used ultrasonic pings to transmit binary data, didn’t work out. There weren’t any standalone op-amps in the lab, so although we tried to desolder and repurpose the components we were given—salvaging op-amps here and there—we were unable to make any noise out of the ultrasonic transducers. However, this led us to our later success with bluetooth!
Accomplishments that we're proud of
We're very proud of the skills we gained; for instance, we designed an entire communications protocol for use with the ultrasound system, which only used 5 bits per character. This greatly increased the speed at which messages move through our network.
What we learned
We learned how to work with environmental sensors of various kinds and apply sensor fusion techniques to synthesize them. We also experimented a great amount with various communication protocols. We dealt with SPI and I2C protocols, devised a mathematical model so that our joystick could communicate with the oled screen, and we deeply researched and tested ultrasonic communication, IR communication, and bluetooth communication.
What's next for Hiker Helper
In the future, we hope to expand our network of sensors to include more ground cover. We think it'd be especially applicable in areas that have typically drier climates and poor reception; applying a local, distributed, and environmentally useful network could be the solution we need not only to extend the map of possible navigation outdoors, but also to monitor for wildfires. We'd also love to implement LoRa and ultrasonic as alternatives to bluetooth for mesh network communication.

Log in or sign up for Devpost to join the conversation.