-

Hi! I'm trash!
Inspiration
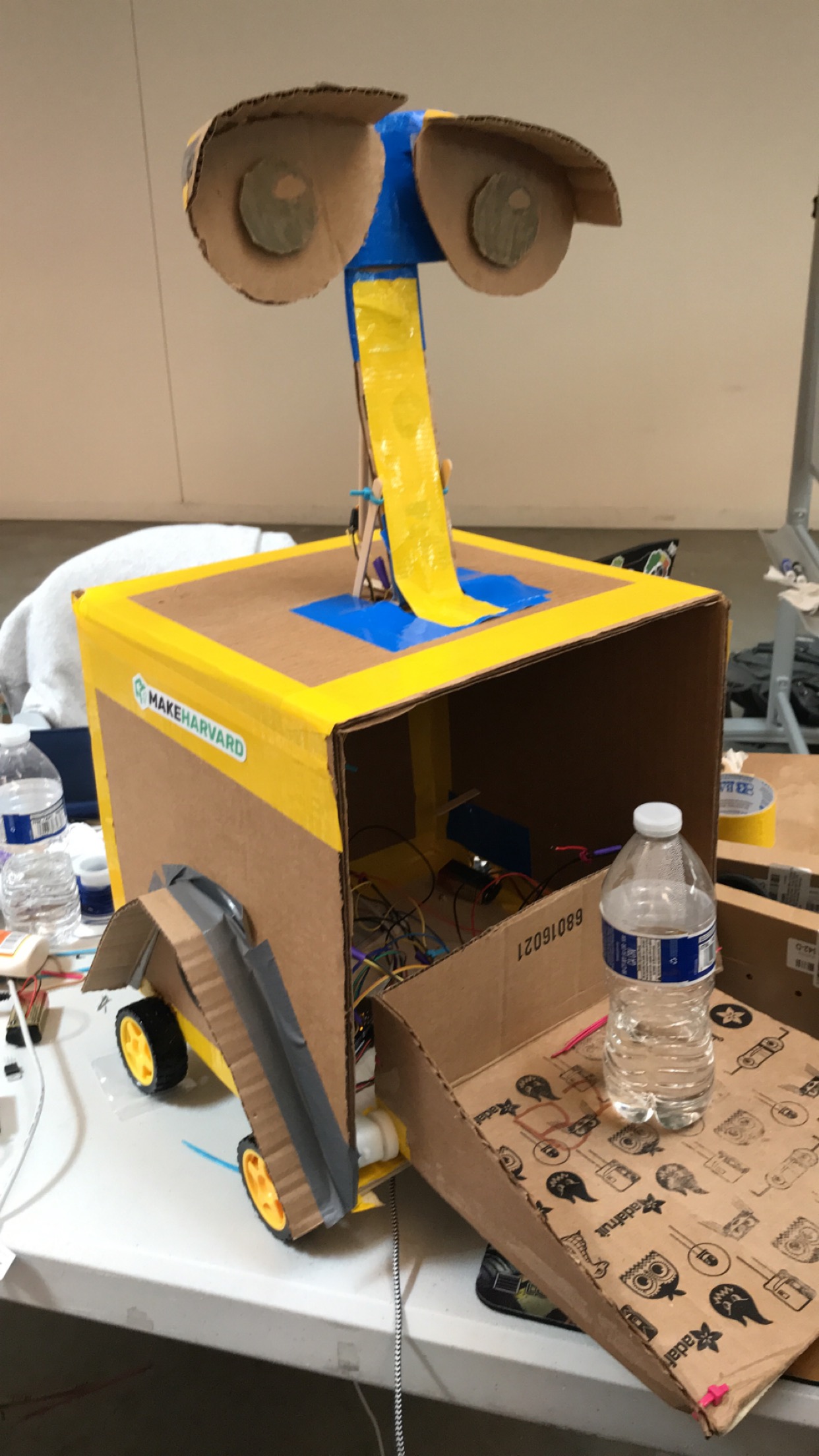
Our team was inspired by all of you! Taking a walk around the workroom we found countless plastic bottles laying around on the ground. This is a common problem at many large events like hackathons, street fairs or music festivals; with lots of leftover garbage on fields or the streets to be picked up. The ~aesthetic of our bot is inspired by Wall-E! In the movie Wall-E, he is left alone to clean up the mess humanity left behind before fleeing to space. We wanted this project to be something fun and useful while also addressing the issues of pollution and increasing amounts of garbage we produce.
What it does
"Wall-Z" or "Hi! I'm trash" has a mission to autonomously traverse the land to go around and pick up the trash/recyclables for disposal. The bot is able to drive around, open/close its belly flap, pick up trash and store it inside its 'belly', and he can do a little dance for added charm.
How I built it
We used Arduinos and servomotors for most of the mechanisms. We hooked it up to Matlab and made a GUI for the controls.
Challenges I ran into
MANY. None of us are electrical engineers so it was quite a steep learning curve! Powering all of the motors was quite tricky without voltage regulators and we simply ran out of time for programming a computer vision system to hook up to our camera to detect what type of trash it is we are collecting.
Accomplishments that I'm proud of
We learned A LOT! And we think our bot is adorable. We also became honourary electrical engineers, and most importantly we had fun!
What I learned
We learned to be creative with limited resources and did a crash course in power electronics at 3 AM. First time learn how to use Arduino to connect the controller and motors.
What's next for Hi! I'm trash
We hope to finish integrating all the systems for our bot and complete the autonomous program. With that done, it can be tested to clean up after the next hackathon.




Log in or sign up for Devpost to join the conversation.