Inspiration
I've always been interested in building walking robots. By building a Hexapedal, I hope that I've successfully turned my passion into a useful resource others can access.
What it does
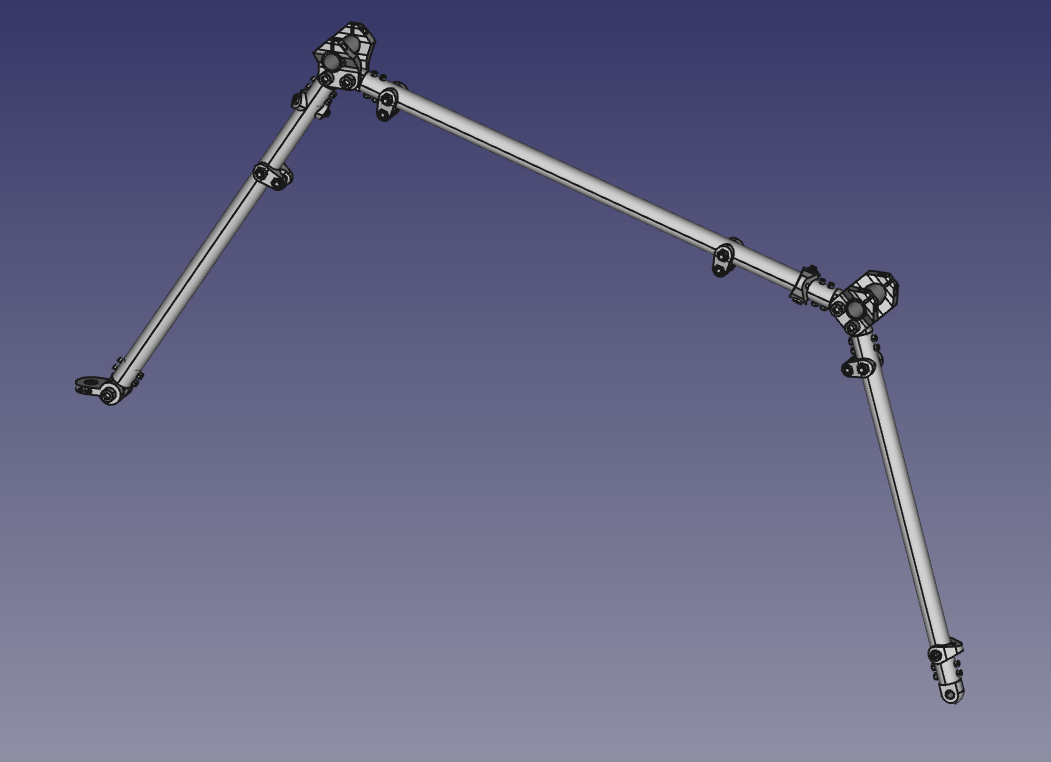
Hexapedal has six independent legs that each possess three degrees of freedom. Of the three joints on the leg, two are controlled using pulleys and springs to reduce actuation time and cost. The final joint is directly driven by the motor and controls the rotation of the entire leg.
How we built it
I designed the entire project in FreeCAD and am currently writing the control script in the Arduino IDE.
Challenges we ran into
Mounting the motors was significantly more complicated than I expected. Unfortunately, this means the pictured/uploaded CAD only contains the full leg assembly without the main body.
Accomplishments that we're proud of
I'm proud of the scalability of the design. Basing the legs off of electrical conduit means the height of each and every Hexapedal can be tailored to any specific user.
What we learned
I learned how to interpret each of the values on most motor data sheets and extrapolate the most relevant information.
What's next for Hexapedal
I plan on finishing the frame and pushing it to GrabCAD. As for the entire project, I hope to publish it as open-source to encourage modification and build a community around the idea.
Built With
- arduino
- freecad


Log in or sign up for Devpost to join the conversation.