

Inspiration
We are a team of multidisciplinary students from Imperial College Robotics Society. As robotics is often both a challenging and expensive field to explore, one of the fundamental goals of our society is to promote robotics education and make robots more accessible to students and the public. This project very much acompasses this idea, where we wanted to develop a high quality 6-legged robotic platform purely out of common DIY resources and lasercut/3D printed components. As such, we as a team aim to be a source of inspiration that anyone can get into robotics, showing how an entirely new robotic platform can be developed from scratch within 24 hours during a hackathon.
What it does
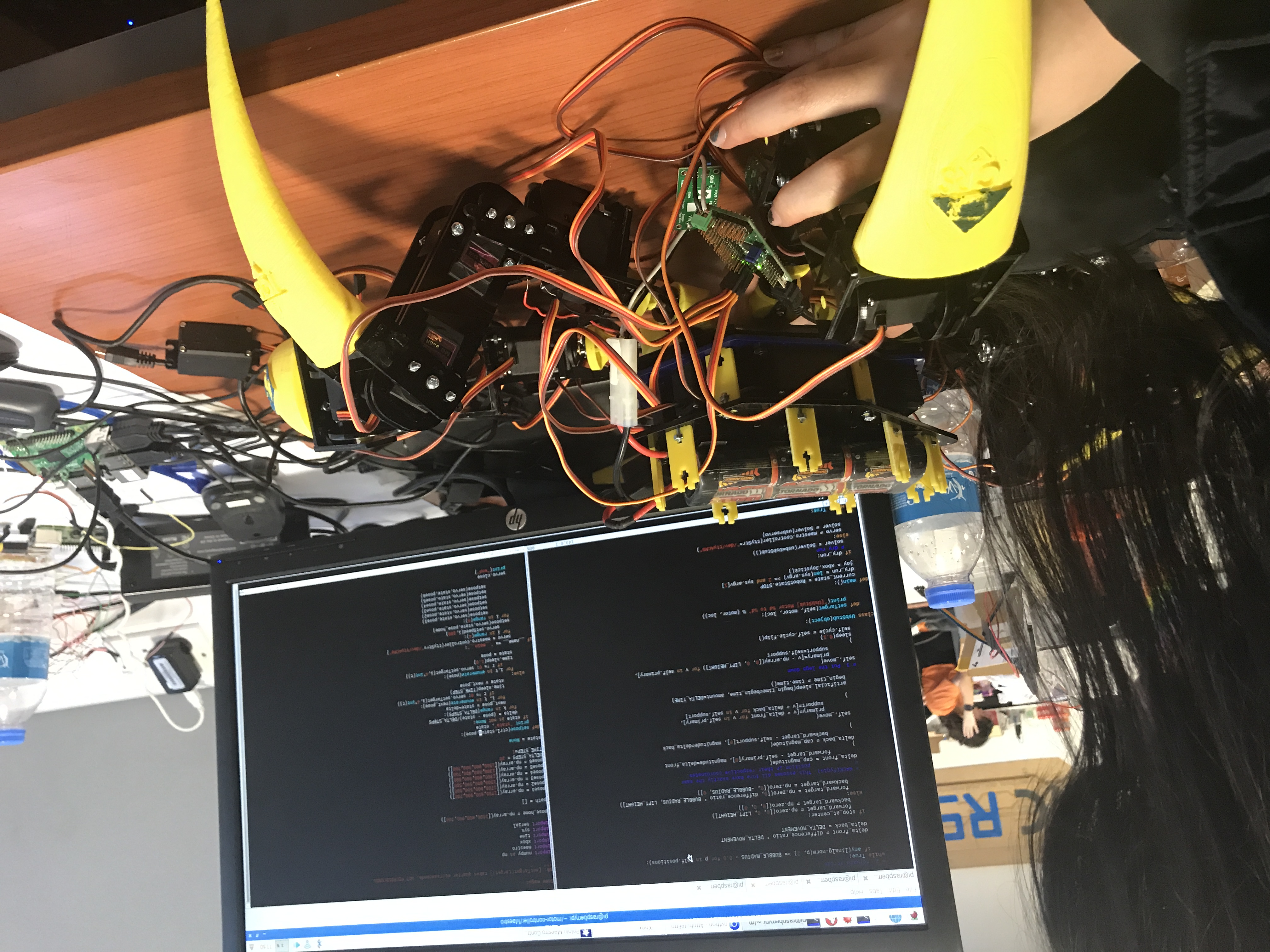
The current iteration of the robot performs is controllable through an xbox controller interfaced to a RaspberryPi. Built into the Pi is a custom developed software suit performing trajectory planning and inverse kinematics. However, there is only one functional limb due to constraints with power and hardware limitations. All six limbs should however theoretically be functional should the hardware requirement been met. Additionally, we have attached on an FPV wireless camera to enable the operator to view what the robot sees, which could be useful and applicable for example to use the robot in search and rescue contexts. We have also provided infrastructure to incorporate VR immersive control and LeapMotion gesture control, however, were unable to develop it into a presentable state within the time and resource constraints of the Hackathon.
How we built it
The robot has been designed by our team member and Mechanical Engineer, Nick Hafner, leading up to the hackathin. However, most of the custom components were made and the entire robot assembled during the Hackathon, with full systems development done throughout these past 24 hours as well.
Challenges we ran into
As with a hardware project, we has to preplan under time and budget constraints what hardware we needed to prepare to realise such a project. Unfortunate with any development, we were met with unforeseen problems (i.e. not enough hardware to provide the current required to regulate the power for all motors), and so had to constraint the project for demonstration purposes. As these problems were met, we also needed to balance iut our focus and efforts away from intended functionality (such as VR) as it would not have been demonstrated wothout an assembled robotic platform anyways. However, we believe we have developed a solid framework and were very close to developing a very high quality project especially given that it was hardware oriented and the time and resource constraints.
Accomplishments that we're proud of
As noted above, we are very proud that we were able to achieve as much as we have. We set out to be very ambitious, and this journey has laid out a solid framework where we shall durther develop the robot in contirbution to our aims of making robots more accessible to the general public. We also are very proud of being able to show what we have achieved under such time and budget limitations.
What we learned
We learned a lot about working together to achieve something awesome.
What's next for Hexapod
We’re hoping to complete our initial goals of a fully moving robot, implementing VR based immerison and gesture based operator control. We hope to open-source this project to the public, use it to raise publicity for the Imperial College Robotics Society, and use it as the basis for our planned Robotics 102 course. We just hope our efforts aim to improve robotic interest and education, whilst doing something awesome!
Built With
- c++
- leap-motion
- oculus
- python
- solidworks
- xbox
Log in or sign up for Devpost to join the conversation.