-
Robot
-

-
Design
-
-

-
-

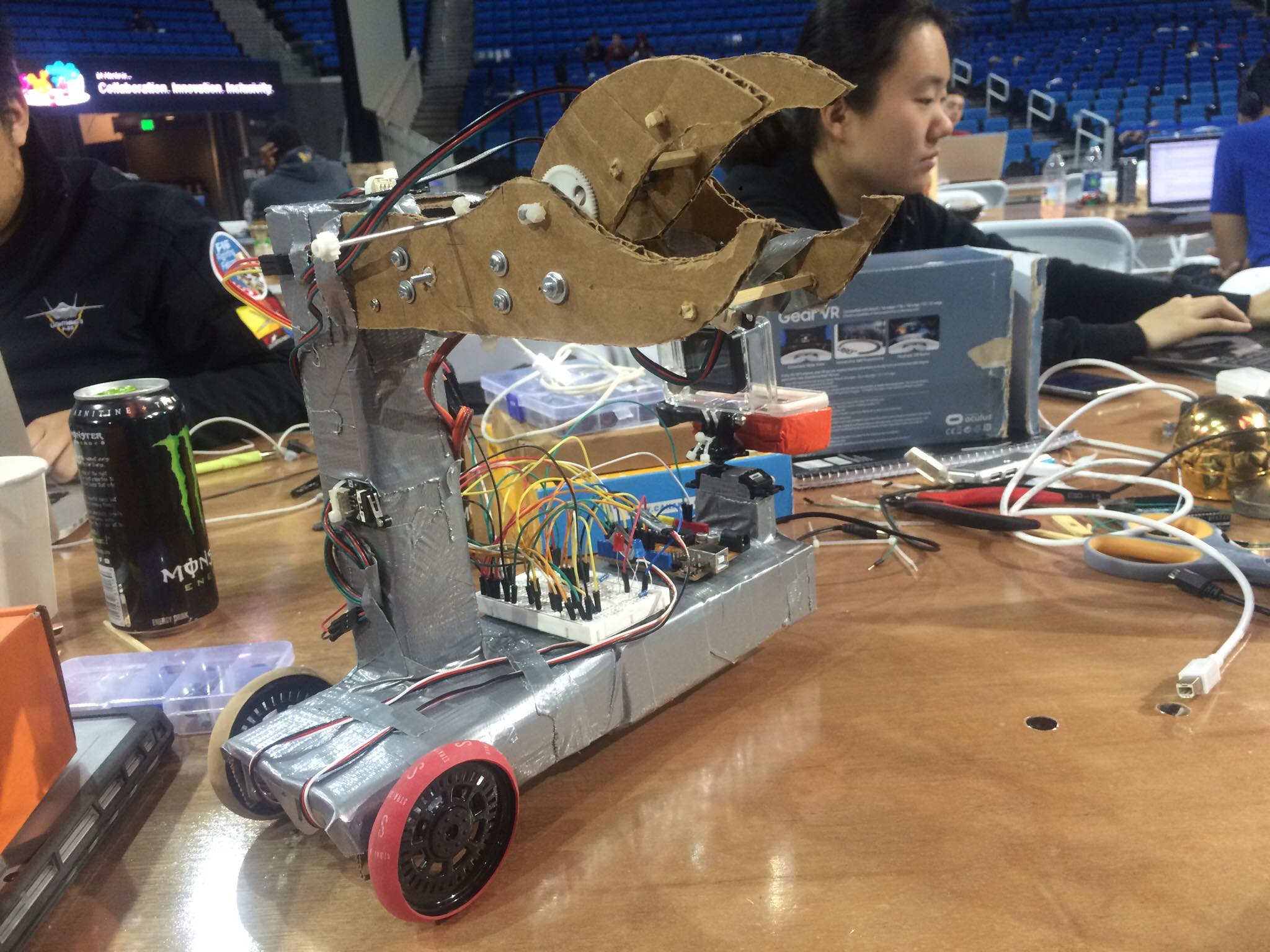



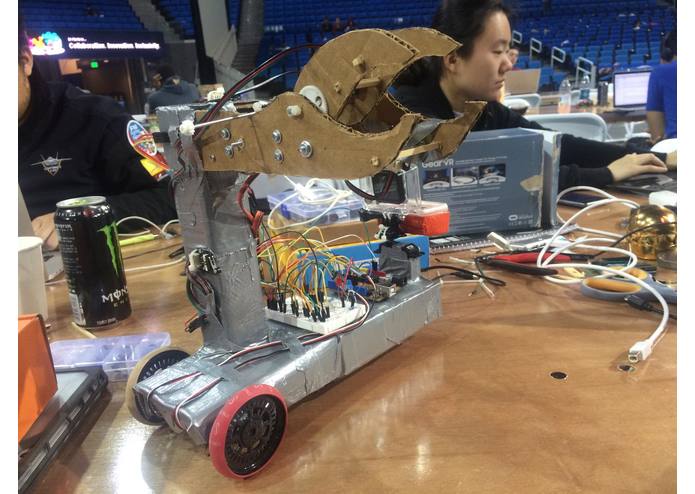
We made a robot that could go into hazardous situations, using joysticks and computer screens.
- The powertrain of the system utilizes a pair of continuous servos and a caster wheel to achieve a broad, stable, mobile foundation for the robotic arm and camera. The powertrain and robotic actuator can be fully interfaced using the Myo sensor suite.
- The GoPro on the robot can help people see the robot's arm and the environment it's in. It can be controlled using a phone via an app and a bluno bluetooth.
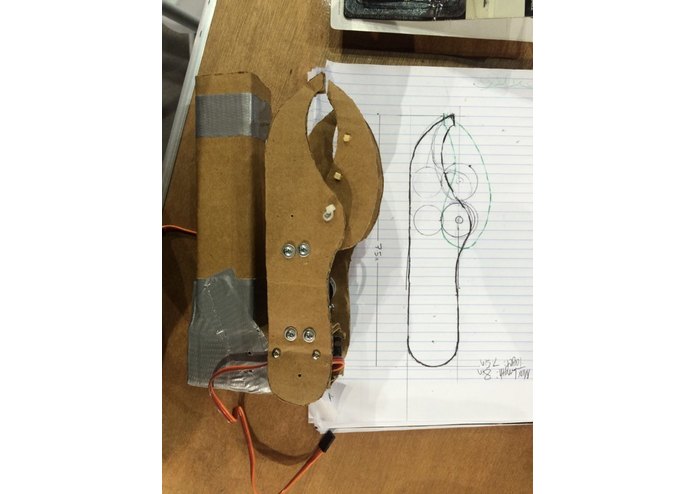
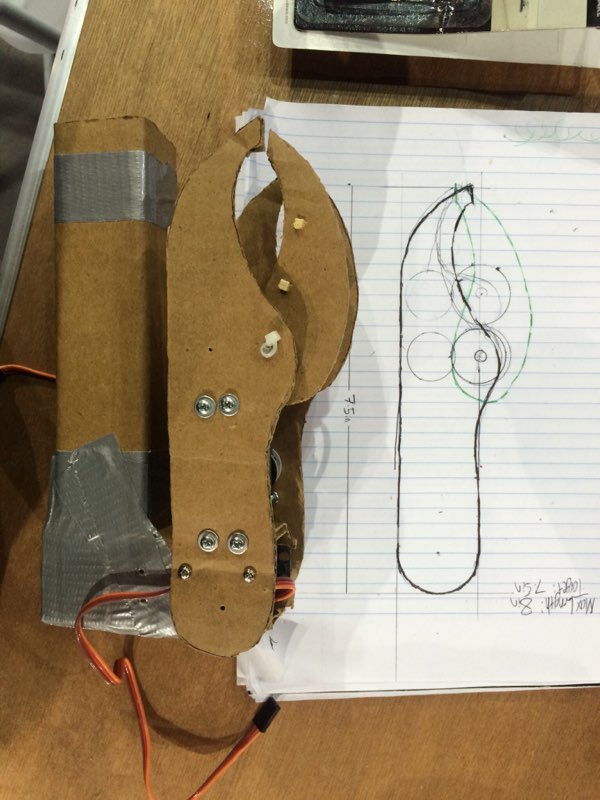
- The arm is real-time controllable actuator using a pair of servos. It has one degree of freedom with an adjustable end effector. The purpose of choosing 1 degree of freedom was to demonstrate the capability of the vehicle and control, while adhering to strict time deadlines.
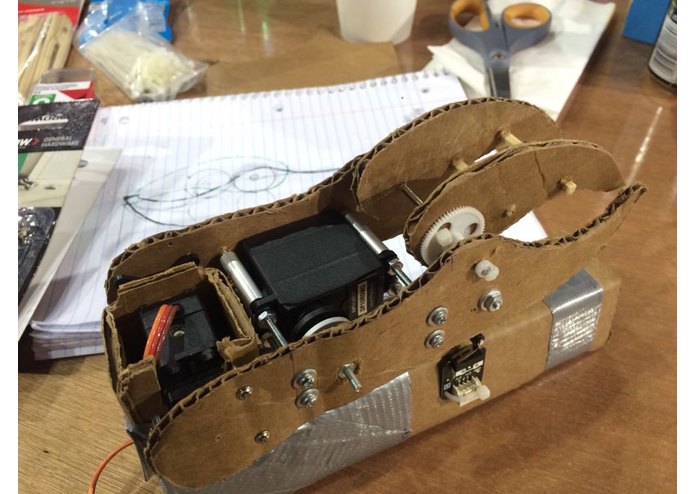
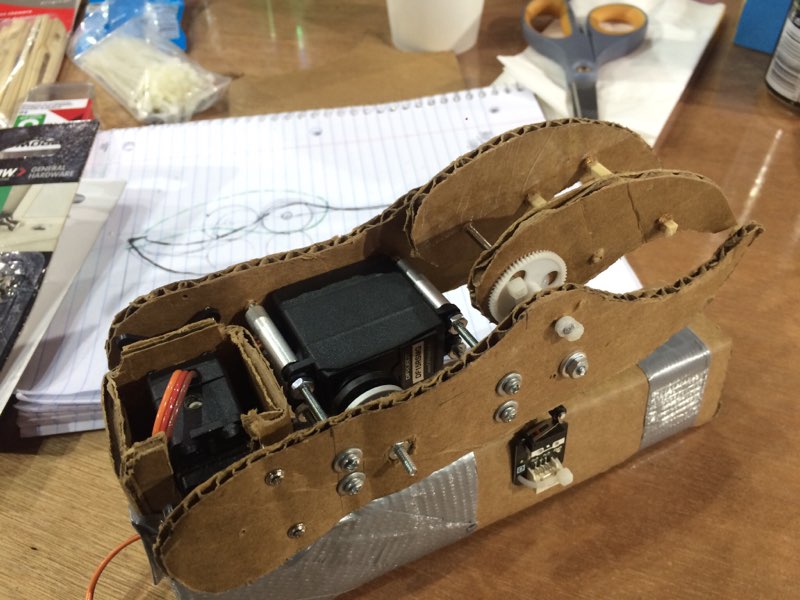
The end effector of the robot utilizes a rubber banded-geared differential from a high torque servo motor stationed close to the center of mass of the vehicle. By using the rubber band-geared differential, less power was lost to overcoming the gravity of the end-effector mounted servo motor.
The high torque sensor system is incredibly easy to use with the Myo system, as it has fully implemented crash sensors to correct the end effector from reaching too far. This helps operators focus more on the objective at hand, than worrying about not damaging the robot.
Due to surprising hardware limitations:
- The robot currently operates on a tether. We have been able to determine that the vehicle can become fully wireless with including an HM10 and HM11 bluetooth modules.
- The wifi module that hosts our live camera stream is weak in comparison to the results we desire.
- We were limited to cardboard and duct tape, ideally we would like to utilize more reliable materials for the real world application.
Built With
- arduino-uno
- dfrobot-bluno
- gopro
- motors
- myo

Log in or sign up for Devpost to join the conversation.