-
-
IT WORKS
My name is Henry Meier, I am majoring in Computer Science at San Francisco State University. This is my first time attending SFhacks and I have to say I am thoroughly impressed. It is a ton of fun working late into the night on a science project or hack and even better to do so with friends and colleagues.
My idea this year was simply to build something fun while learning something new. I purchased a GSM module for an arduino microcontroller and had just hoped to experiment with it late into the night, and perhaps build a small little project such as a text message controlled robot, or an IoT device that could turn LEDs on and off over a cellular connection.
Things didn't work out as planned. The SIM card I purchased did not seem to work with the GSM module. No matter what I tried I could not get the PIN code activated for the GSM module and for that reason could not create a cellular connection. Around 4AM I gave up on the GSM-based project and decided on building a robot with the arduino microcontroller instead.
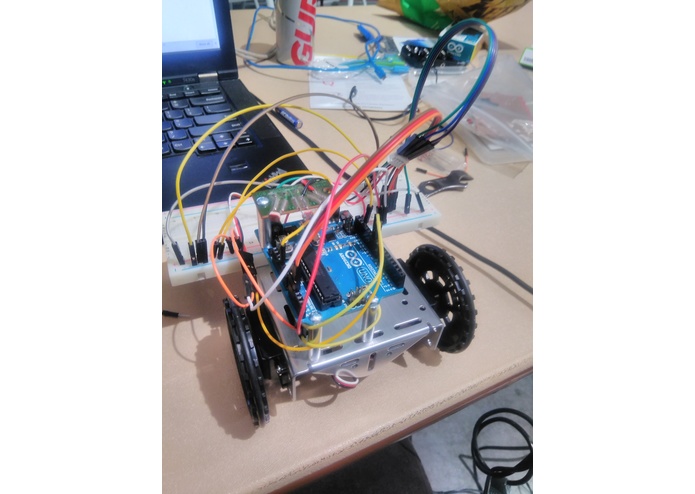
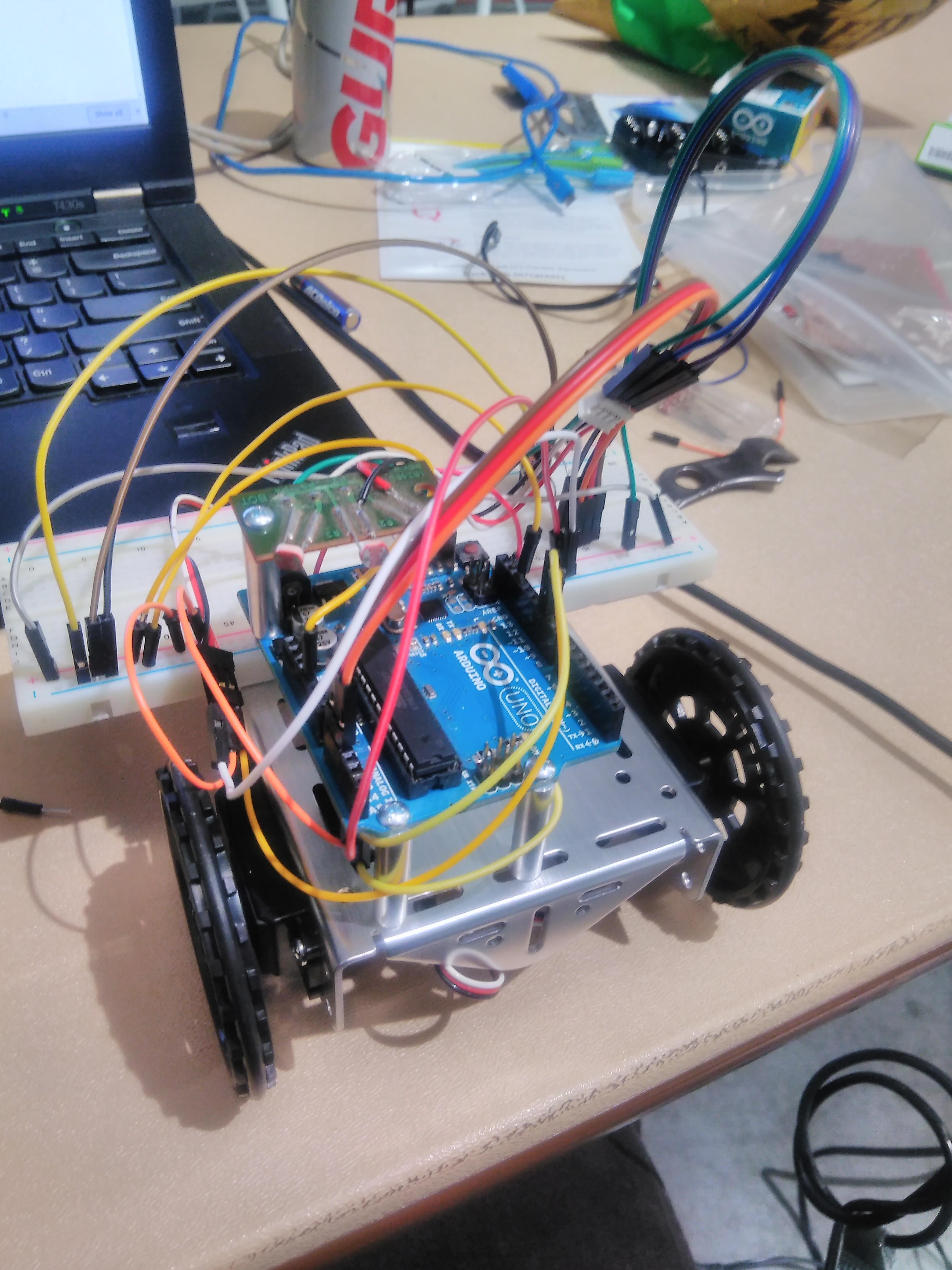
I was able to get the robot’s servo motors working with a little Internet research, however, I needed input for the robot otherwise it would remain a mindless automaton. Fortunately, I had a small board scavenged from a remote control, with three photoresistors embedded in it. When coupled with some 10K Ohm resistors, each photo resistor becomes a versatile sensor for the arduino microcontroller.
Every input is analysed with the arduino’s internal analog-to-digital converter, and the remaining information about light is captured as an integer. Three integers with rapidly fluctuating values are being analysed by the arduino, which in turn makes a judgement call using internal logic. With the three sensors active, the robot will try to turn either left or right towards the light source until the central value for the light sensors remains the most intense.
It is interesting to watch the robot move aimlessly about. To finish this project off, I will continue to improve the logic and sensor calibration for the robot so it can track light more accurately.
The hardware options I had for this project was very limited. I ended up loosely securing wires and my battery pack to the robot just due to time constraints. It is a sloppy job but the prototype holds together well. All in all, l I learned a lot over the course of the night, and socializing with many people during the hack event.

Log in or sign up for Devpost to join the conversation.