-
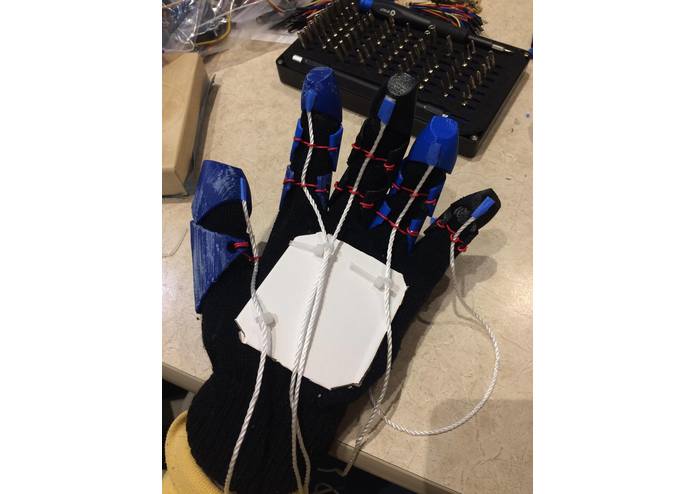
Picture before motors are attached
-

Testing the contraction for the first time
-
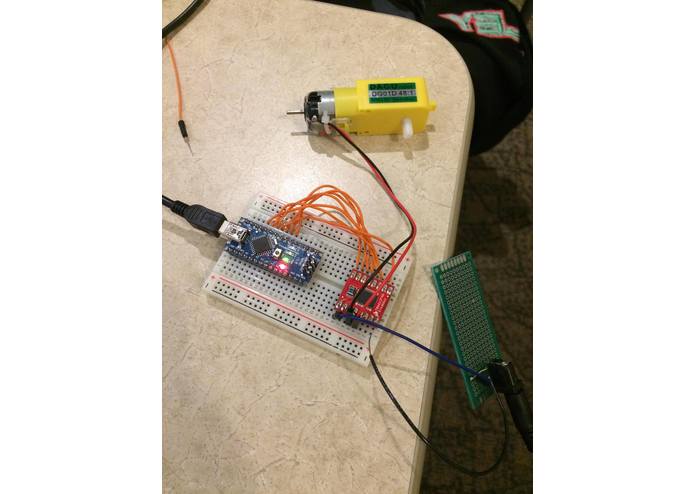
Getting the Code working
-

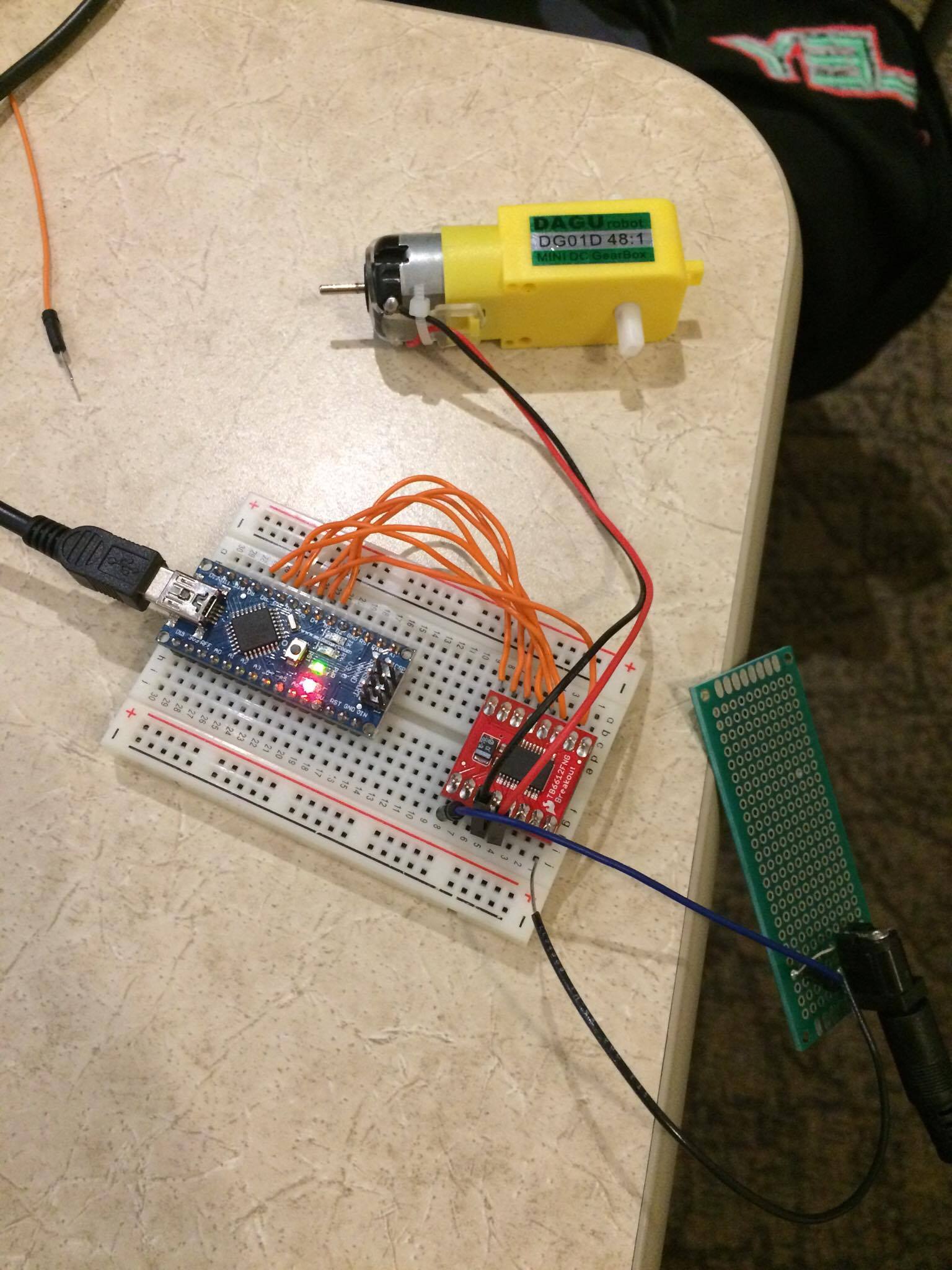
Another prototyping shot



Inspiration
One of our team members recently broke his hand and will soon have to go through physical therapy to start moving his fingers again. While he has the opportunity to see a physical therapist or afford products that can help in his rehabilitation, we started to think about those less fortunate. What about individuals that can't afford to see a physical therapist or get any sort of aid with their rehabilitation? There are millions of people that need this kind of help so we thought we might be able to lend a hand.
What it does
We've developed an extremely affordable device that can help people facing challenges with finger rehabilitation. When an individual is too weak to move their hand on their own in order to begin gaining more mobility in their fingers, our device steps in with a pair of simple motors that help the person to regain that motion. While one motor under the wrist helps with forming a fist, another motor on the top of the hand help to spread the fingers out again. These kinds of exercises can greatly help in regaining full control.
It isn't what our device does that makes it unique or sets it apart. It's how we made it that really shows the impact that it can have on those in need.
How we built it
The entire idea behind the project was about making someone that everyone could get access to or even make for themselves. Every step of the way we sought to use materials that are common or fairly easy to obtain. This resulted in the current model of our device that we have for show.
The device has a simple glove at its core with a number of customizable 3d printed joints that easily attach to the fingers of the glove with zip-ties. We then run a simple piece of string from the wrist under each zip-tie and then glue it to each fingertip. The other end of the strings are then attached to a dc motor that lies on a 3d printed guard along the wrist. A similar process is done on the top of the hand and both of these motors are then controlled by a small Arduino that resides on the top of person's wrist.
All of this results in an extremely affordable device that can be shipped all over the world in simple kits for those that need a little helping hand.
Challenges we ran into
The biggest challenge of this project was making sure we reduced cost as much as we could at every stage of the build. There are a number of similar devices on the market that use a number of expensive motors or rods of each individual fingers, but these devices can be extremely expensive, or too delicate to send to people in developing countries in any kind of large quantity.
By limiting the kinds of materials we could use, we were forced to come up with unique ways to use simple materials such as zip ties and string to replace what is normally nylon and elastic materials.
Accomplishments that we're proud of
We were able to 3d print the majority of components and keep the price down considerably while still maintaining the durability and functionality of the device.
What we learned
A number of people on our team were able to learn more of the advanced tricks in designing and printing 3d printed parts. We also had opportunities for members to learn new programming and prototyping skills in the process of wiring and programming the device.
What's next for Helping Hand
We are looking to continue to refine the project because we don't think it's perfect yet. We could still develop a design that utilizes a single motor instead of two. We also want to look to improve the designs safety and design better mounting points for the electronic components. We know it's not perfect, but we think we have made a huge leap in the right direction of helping those in need and look forward refining the device till we have something we can send to all those in need throughout the world.


Log in or sign up for Devpost to join the conversation.