-
-
Desktop view
-
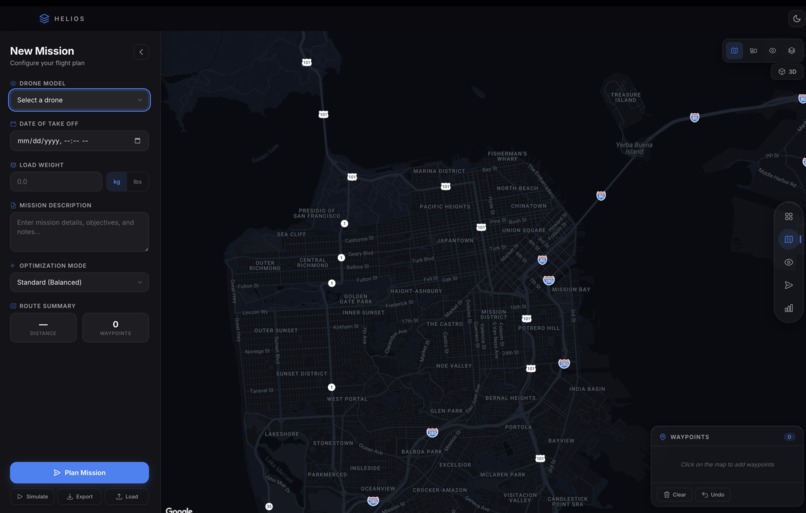
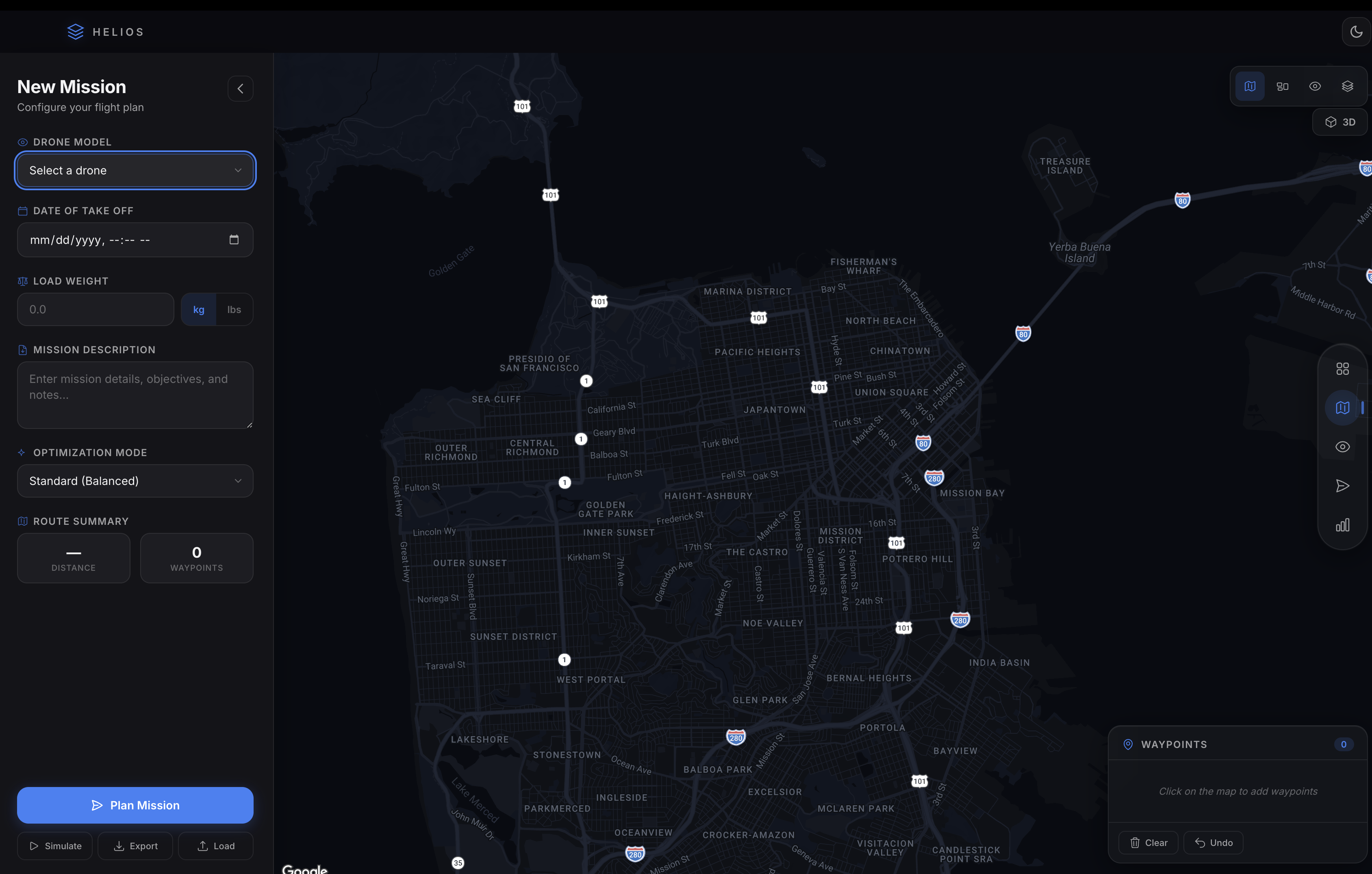
Mission planner
About the Project
Helios is an AI-powered desktop application for managing professional drone fleets across both real-world and simulated environments.
Modern drone operations rely on a fragmented collection of tools for mission planning, live telemetry, and post-flight analysis. These tools are often disconnected, which increases pilot workload, slows operational decision-making, and makes it difficult to extract meaningful insight from flight data. Helios was built to unify these workflows into a single system while introducing AI-driven intelligence at every stage of a mission.
At the core of Helios is a lightweight Single Board Computer (SBC) service that runs directly on onboard hardware such as a Jetson Orin Nano or Raspberry Pi. This service interfaces with the drone’s flight controller and exposes telemetry, mission state, and system data through HTTP APIs and WebSocket streams. From Helios’s perspective, every drone, whether real or simulated, behaves identically.
This abstraction allows Helios to manage heterogeneous fleets. In this project, the fleet includes a custom-built Tarot X-class octocopter using a DJI A3 flight controller and NVIDIA Jetson Orin Nano, alongside a Pixhawk-based hexacopter running Ardupilot on a Raspberry Pi. Helios also integrates directly with Ardupilot simulations, allowing users to interact with virtual drones exactly as they would with physical hardware.
Helios uses Gemini 3 models to provide intelligence throughout the operational lifecycle. During mission planning, Gemini 3 analyzes routes and generates optimized flight paths and pilot briefings. During live operations, the model can be queried for flight analysis or alternative routing based on real-time telemetry. After a mission completes, Gemini 3 performs automated analysis of flight logs, producing structured reports that highlight performance metrics, anomalies, and optimization opportunities.
By combining real-time telemetry, simulation support, and AI-driven analysis into a single application, Helios turns drone fleets into intelligent systems rather than isolated vehicles. The result is faster planning, safer execution, and continuous learning from every mission.
Inspiration
Professional drone operations are becoming more common in areas like disaster response, inspection, and public safety, but the software used to manage these operations has not kept pace. Planning missions, monitoring live flights, and analyzing results are often handled by separate tools, forcing pilots and operators to constantly switch context. The inspiration behind Helios was to treat drone fleets as intelligent systems rather than isolated vehicles, and to use AI to reduce manual effort while improving safety and decision-making.
What it does
Helios is a desktop application that unifies mission planning, live fleet monitoring, and post-flight analysis for both real and simulated drones. Operators can add drones to a fleet, plan missions using an interactive map or uploaded files, monitor telemetry in real time, and generate automated flight reports. Gemini 3 models power mission optimization, live flight analysis, and post-flight insights, allowing users to quickly understand what happened during a mission and how it can be improved.
How we built it
Helios is built as a cross-platform desktop application using Electron with vanilla JavaScript for the frontend. Backend services are written in Python and handle telemetry ingestion, AI orchestration, and data analysis. A lightweight C++ Single Board Computer service runs directly on onboard hardware such as Jetson Orin Nano or Raspberry Pi, interfacing with flight controllers and exposing data through HTTP APIs and WebSocket streams. This architecture allows Helios to treat real drones and Ardupilot simulations identically.
Challenges we ran into
One of the biggest challenges was designing a system that could support multiple flight controllers and both real and simulated drones through a single interface. Ensuring reliable real-time telemetry streaming while keeping latency low was also difficult, especially when integrating AI-driven analysis during live operations. Another challenge was balancing technical depth with usability so the application remained approachable for operators.
Accomplishments that we're proud of
We successfully built a unified platform that works seamlessly with real hardware and simulations using the same data pipeline. Helios can plan missions, monitor live flights, and generate AI-powered flight reports in a single application. We are especially proud of the SBC service abstraction, which allows Helios to scale across different drone platforms without changing the frontend.
What we learned
We learned that abstraction at the hardware boundary is critical for scalable drone software. Treating simulations as first-class citizens alongside real drones dramatically improved development speed and testing reliability. We also gained valuable experience integrating AI models into real-time systems where timing, reliability, and clarity of output matter.
What's next for Helios
Next, we plan to expand Helios with collaborative fleet operations, advanced risk detection during live flights, and deeper automation around mission approval and compliance. We also want to extend AI capabilities to include predictive maintenance and long-term fleet performance analysis.
Built With
- Python – backend services, telemetry processing, AI orchestration, and data analysis
- Electron – cross-platform desktop application framework
- Vanilla JavaScript – frontend logic and real-time UI updates
- C++ – low-level integration with flight controllers and SBC services
- Gemini 3 Models – mission optimization, live flight analysis, and post-flight reporting
- Ardupilot – open-source flight control and simulation
- WebSockets & HTTP APIs – real-time data streaming and system integration



Log in or sign up for Devpost to join the conversation.