-
-
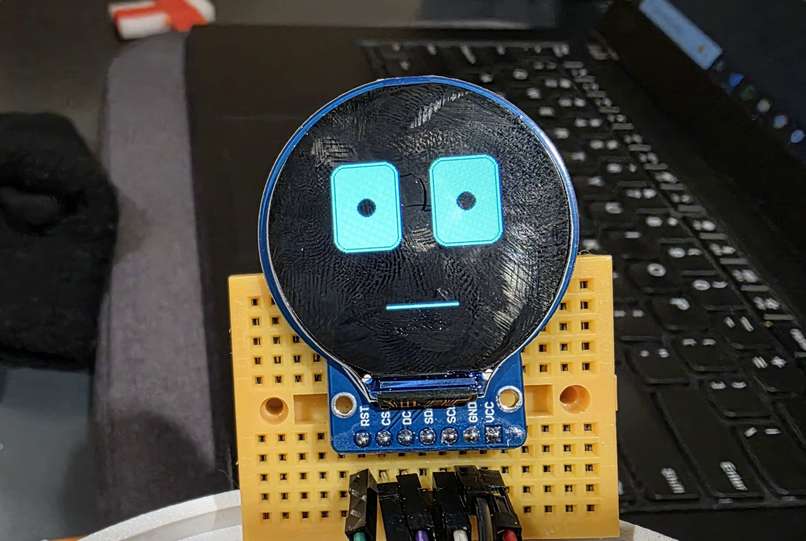
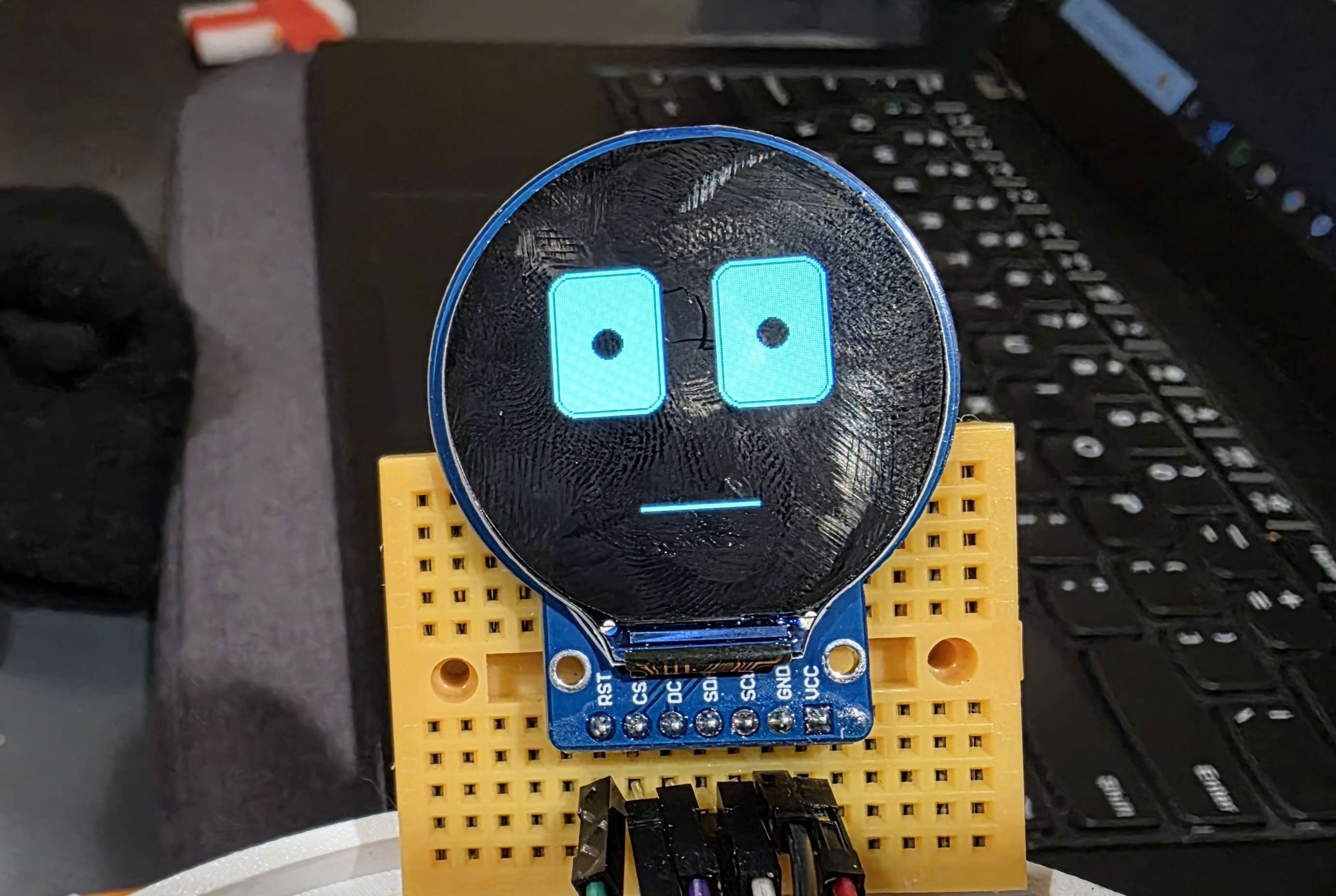
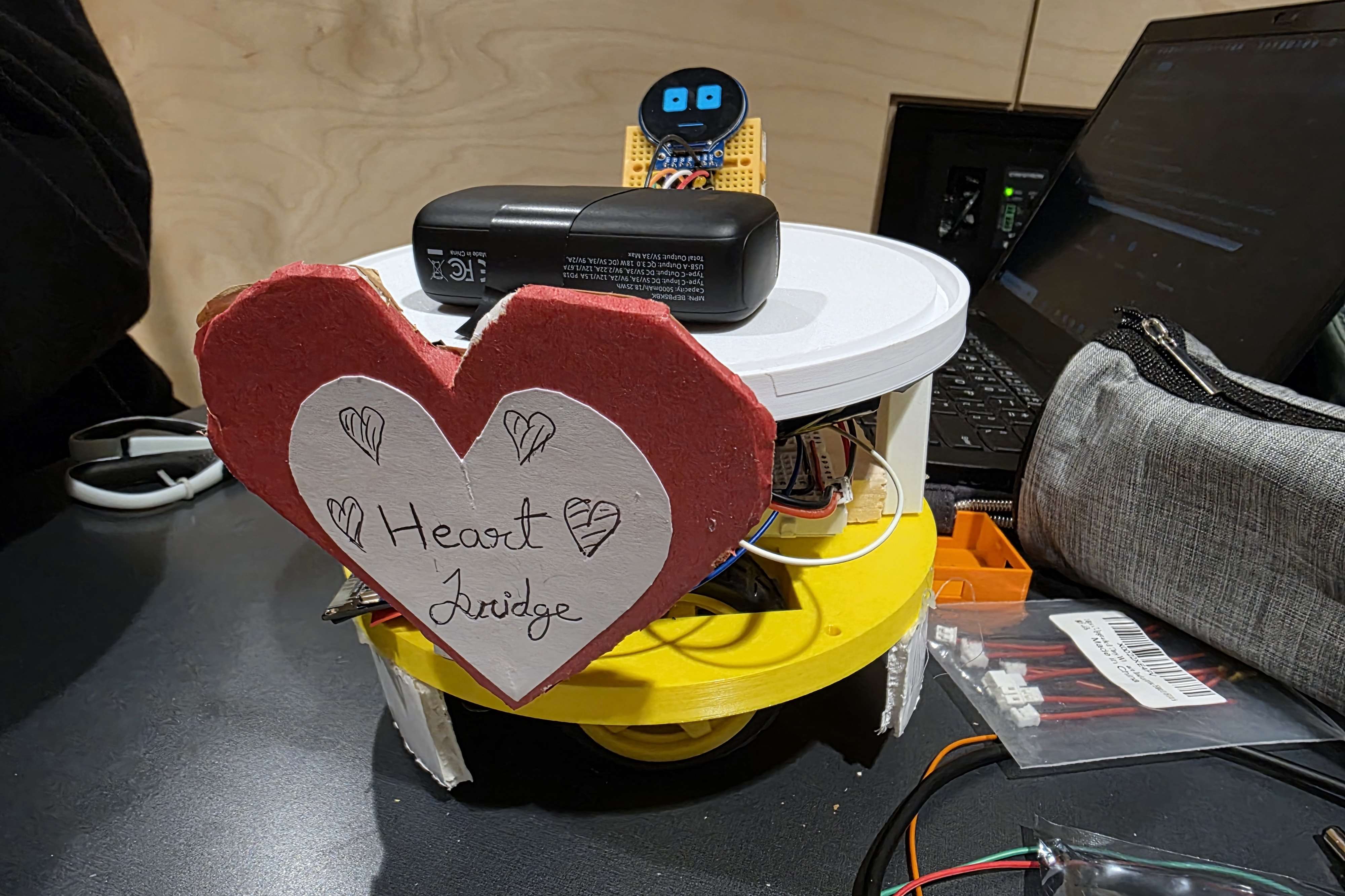
Emoji face
-
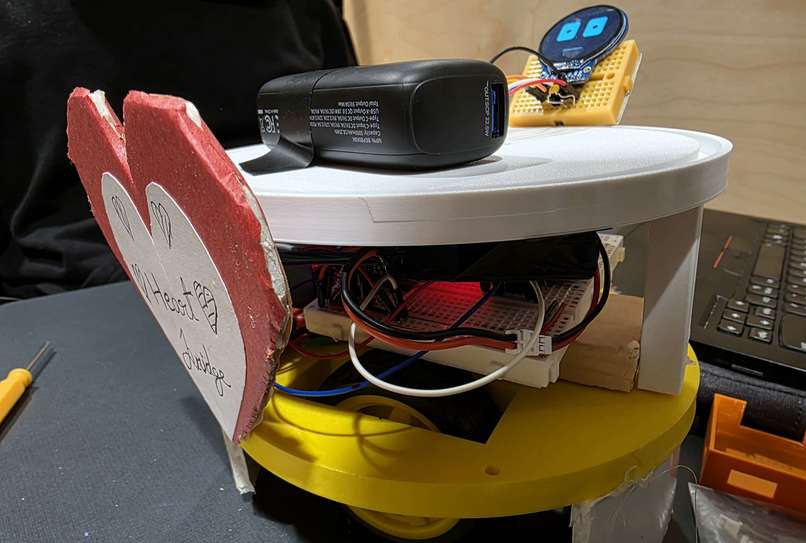
Peek into the internals
-

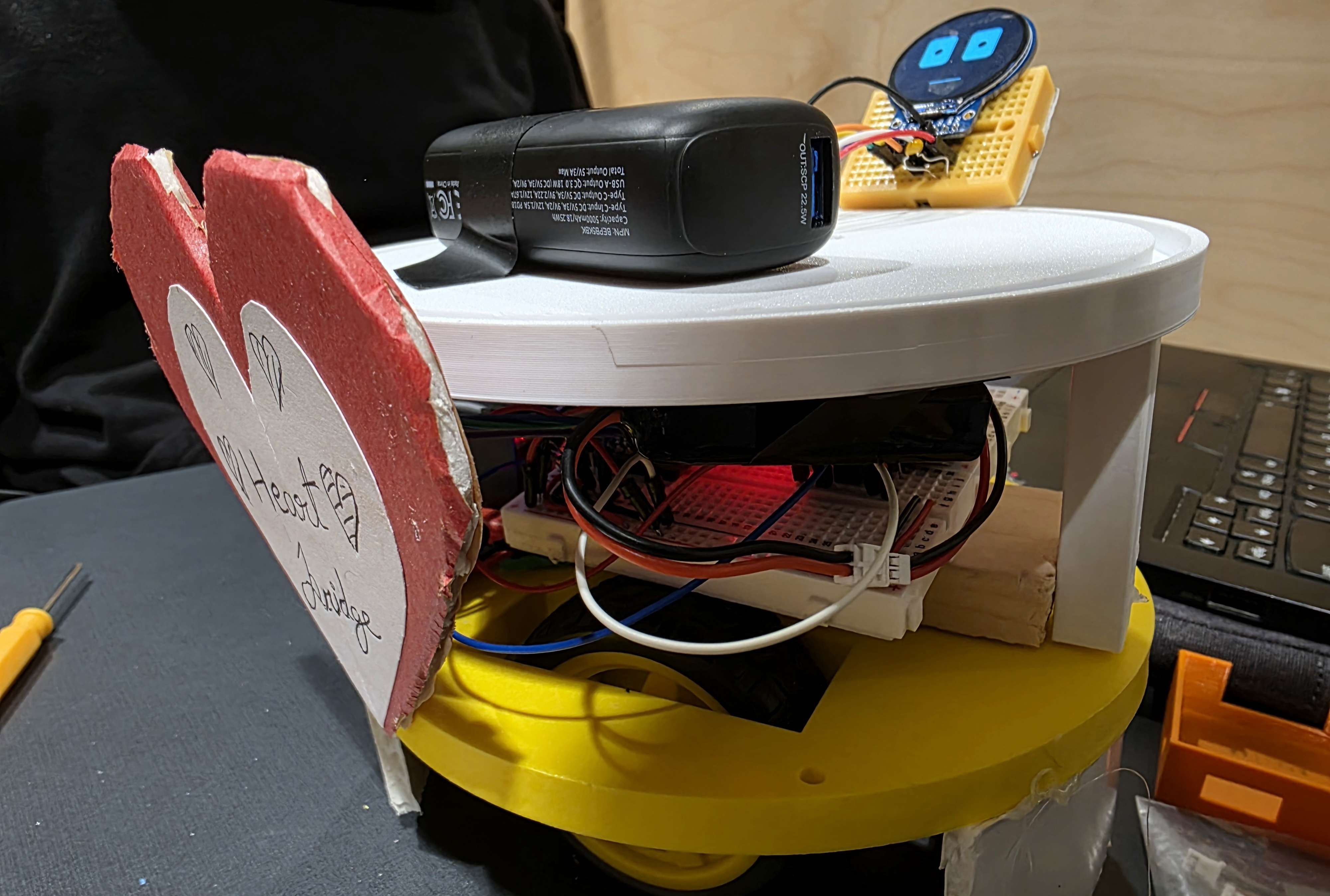
The badge
-

Full project
Inspiration
Distance should not have to weaken bonds. As people of non-Canadian ethnic backgrounds, we were inspired by the experience of our families separated by border - Our grandparents missing us, maintaining long distance relationships over impersonal video calls, and of course, families becoming lonely. So we asked: "what if remote communication becomes interactive, playful, and emotionally present?" - This led to the idea of HeartBridge.
What it does
HeartBridge is a remotely controlled social robot designed to foster emotional connection across distance. Using a phone, users can:
- Drive the robot in real time.
- Display emotions on a round LCD screen.
- View live video feed from the bot's camera.
- Communicate through the robot using voice.
- And ultimately make communication interactive and playful.
As a result, passive calls become physical presence.
How we built it
We integrated multiple embedded and networking systems into a single platform. On the hardware side:
- ESP32 Microcontroller
- Motor Driver + wheeled chassis.
- Round LCD for emotion display.
- Camera module for live video feed.
- Bluetooth audio module for voice transmission.
- Rechargeable battery for repeated use.
Software and Communication:
- Web-based control interface.
- WiFi hotspot control (Current interation)
- LCD animation pipeline for minimal stutter in display.
- Video streaming to the web interface.
- Bluetooth audio processing and relay.
Overall, it is a synchrony of motion, expression, video, and audio subsystems to emulate physical presence.
Challenges we ran into
Being an ambitious project, we ran into multiple challenges. This involved:
- Maintaining low-latency responsiveness over wireless control.
- Synchronizing motion, video, and emotional display in real time.
- Rendering smooth facial animations on limited embedded hardware.
- Managing power demands across motors, display, and camera.
- Integrating multiple communication channels into a cohesive system.
- Trying to host a public server on Linux with an Arduino Uno Q.
Due to time constraints, we made some strategic trade-offs:
- Drop the Arduino Uno Q for the ESP32 (Hotspot control).
- Bluetooth audio instead of internet-based streaming.
- Local hotspot control instead of cloud deployment.
- Simplified chassis for rapid prototyping.
These trade-offs let us build a reliable and functional prototype that can be later improved and made better.
Accomplishments that we're proud of
- Built a fully functional robot in a hackathon timeframe.
- Successfully integrated control, video, audio, and emotional display.
- Created expressive animated emotions on embedded hardware.
- Delivered a responsive and engaging user experience.
- Designed a solution with real social impact.
What we learned
- We learned how to integrate multiple embedded subsystems into a single system.
- The importance of low-latency communication.
- The importance of efficient code in embedded systems.
- Rapid prototyping and decision-making under time constraints
- The importance of prioritizing core user experience over fancy add-ons.
- The importance of planning ahead of time.
What's next for HeartBridge
Next steps include:
- A cloud based relay server for global connectivity.
- Enabling internet-based audio streaming including two way voice relay.
- Adding security and encryption.
- Adding an AI based emotion detection depending on voice tone.
- Including Computer Vision based autopilot tracking to have the bot follow a person/pet.
- Ensuring a smaller, safer, cuter, and more durable design.
- Adding water and dust resistance.
Built With
- 3d-printing
- c++
- cad
- esp32
- l298n-driver-board
- raspberyy-pi-cam
- tt-gear-motors

Log in or sign up for Devpost to join the conversation.