Most of the vehicle crashes are attributed by human-related causes, such as driving aggression, distractions and impaired driving. To truly eliminate vehicular crashes, we will probably need to wait for the era of reliable autonomous vehicles and infrastructures. Therefore, in the next couple decades, the focus will still be how to address and correct human-related driving errors for safety purposes. By virtue of the fast-developing wireless communication technologies, researchers and engineers are now striving to devise all sorts of warnings mechanisms for various dangerous conditions. One of the common characteristics of these warning systems is the prediction of collision potentials. However, basing the prediction only on real-time vehicular running statuses (such as speeds, locations and headings) is far from enough to making the predictions accurate. A logical yet simple explanation of this problem is that many drivers may not drive the way the system designers are assuming. Such gap cannot be bridged unless we know better what individual driver’s driving behaviors are. For example, whether a driver tends to overtake another slow moving vehicle when the space headway is very small; whether a driver tends to run a red-light at the first few seconds of the indication. That is, a warning system can make much better predictions if the system knows what the driver’s typical reaction is for certain driving conditions. The GPS locations and the DSRC communications as well as the ubiquitous computing technologies have paved the way for developing a system that is able to collect important pieces of information useful for establishing an in-vehicle database characterizing individual driver’s driving behaviors. We envision that this database can serve as the foundation for many of the future connected vehicle applications. The first application we propose, based on such an in-vehicle driver behavior database, is the predictions of risky driving maneuvers.
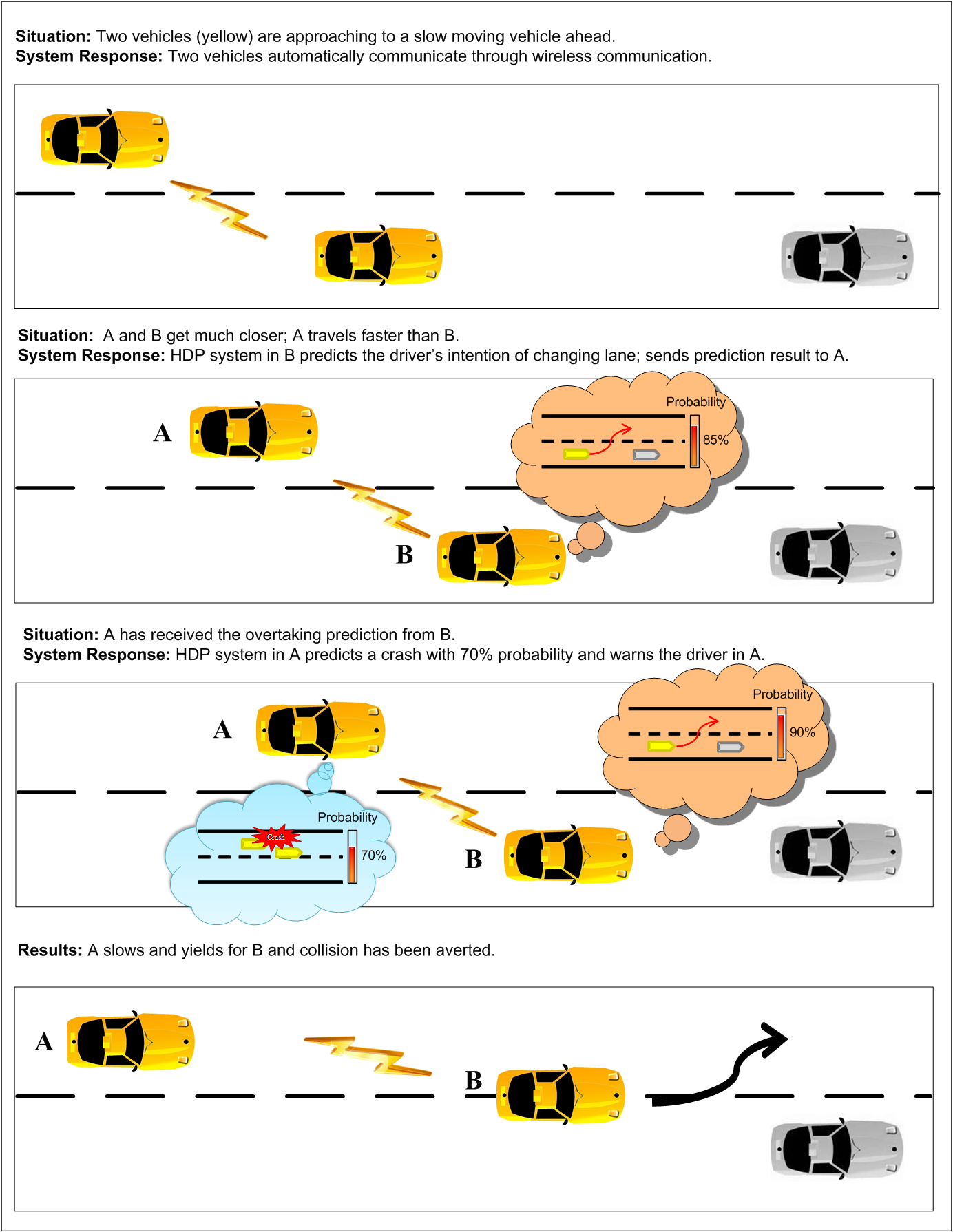
Hazardous Driving Prediction System
Updates

Leave feedback in the comments!
Log in or sign up for Devpost to join the conversation.