-
-

-

Driver View
-
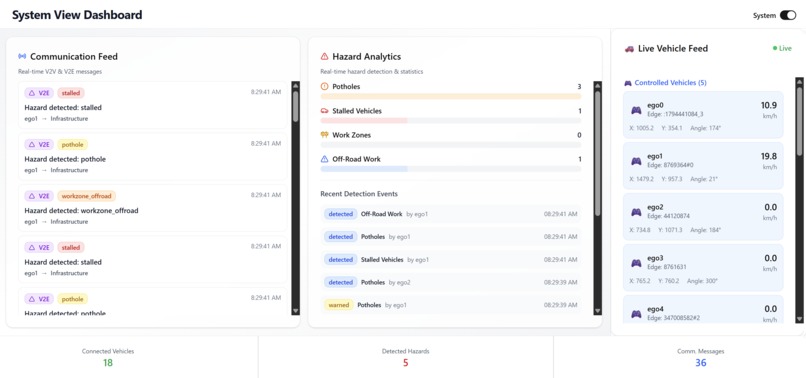
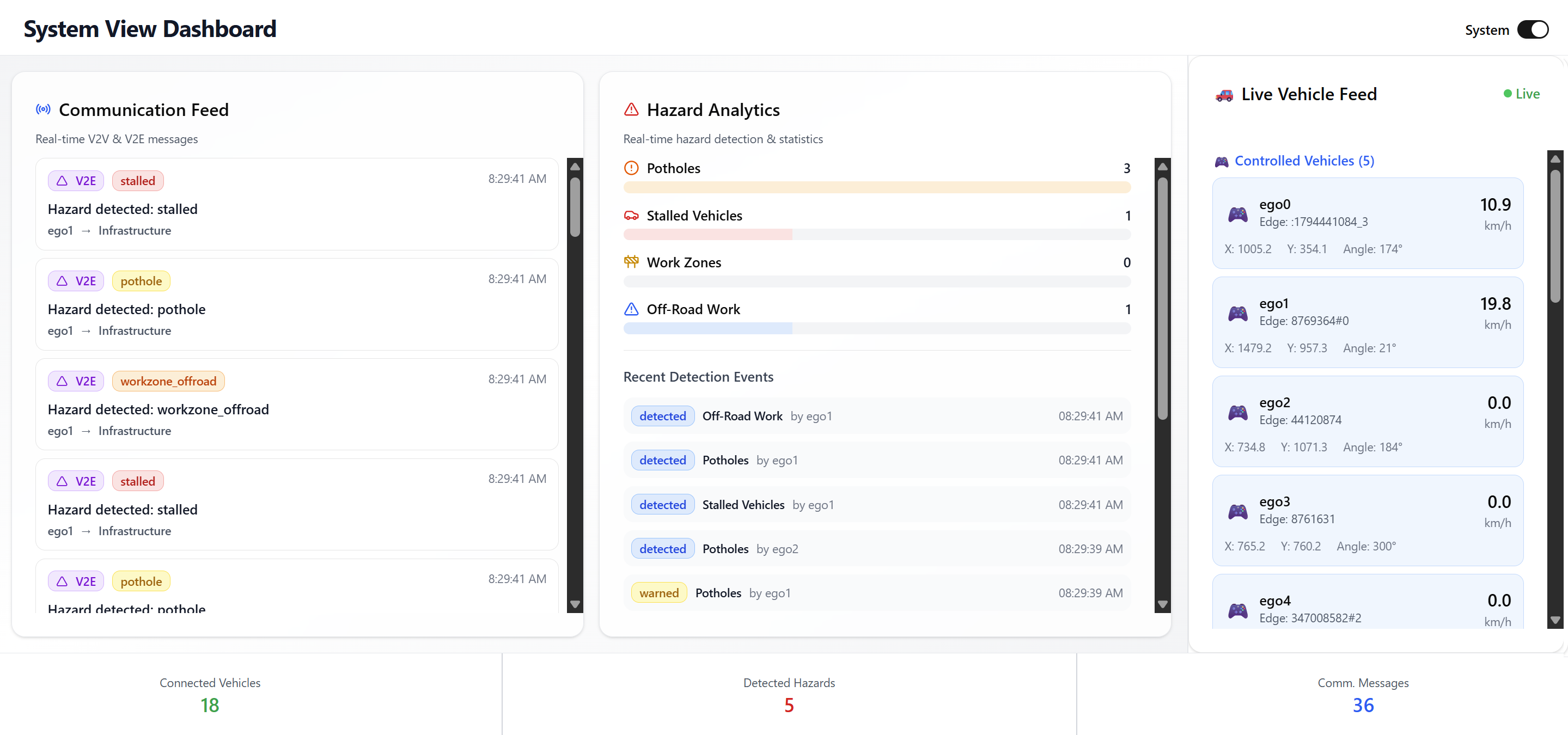
System View


Inspiration
Driving into Dearborn for the hackathon, we saw exactly what makes city roads hard for autonomy: sudden potholes, active construction, stalled vehicles, and random road hazards. We're passionate about autonomous and connected vehicles so we asked a simple question: how can self-driving cars warn each other about these hazards in real time using V2X/V2V? That is how HazardNet started: a lightweight service that lets vehicles sense, share, and act on hazard information so everyone gets safer, smoother trips.
What it does
HazardNet is a lightweight, multi-tool service that:
- Turns hazard sightings into live V2X/V2V alerts other cars can use right away.
- Detects potholes, work zones, and stalled vehicles, tagging each with type, time, and GPS. In our demo, we use an RL policy and a SUMO map of the University of Michigan-Dearborn area to train self-driving behaviour and stress-test the V2X flow.
- Provides a two-part dashboard: Driver View: a clean, Tesla-FSD-inspired view with lane/vehicle overlays and an AI voice assistant (ElevenLabs voice + Gemini for Q&A and commands). System View: a fleet/operator page showing live hazard logs, “who saw what / who forwarded what." Includes data capture for analytics.
How we built it
Simulation and RL Python with SUMO on the Dearborn map using traci. A simple PPO style policy plus rules. It outputs small JSON hazard events with type GPS time and confidence.
Backend Flask in Python. Publishes alerts over WebSockets. Keeps a short lived cache to remove duplicates and expire old alerts.
Driver view React with Vite and TypeScript and Three js. Shows lanes vehicles and hazards in real time.
System view React dashboard with a live hazard feed who saw and who forwarded basic latency stats filters.
Voice loop AssemblyAI for speech to text then Gemini for intent and answers then ElevenLabs for text to speech.
Repo and workflow GitHub monorepo. Env based configs and simple scripts make run backend and npm run dev. Runs locally on a laptop.
Challenges we ran into
Challenges we ran into include:
Training RL Fast: Short hackathon window. Tuning rewards and hyperparameters took time. Models were unstable at first and compute was limited.
SUMO setup and performance: Building the Dearborn map, spawn logic, and hazard placement was tricky. The sim was somewhat jittery until we tuned step length and rates. Traci crashes and path issues slowed us down, but we pulled through in the end.
Accomplishments that we're proud of
We worked as one team with clear roles and fast handoffs, and shipped an end to end demo in under 24 hours - simulation, backend, two UIs, and voice control on one laptop. We built real time v2x hazard sharing between autonomous vehicles and trained reinforcement learning drivers with six agents on a custom sumo Dearborn map of the hackathon area. The demo included a 3d driver view and made use of the sponsor tools to keep everything lightweight and practical. We also added data analytics like hazard hotspots and trends so automakers and cities can act, while drivers get a better in car experience. The result is a connected and intelligent vehicle experience that feels useful beyond the demo.
What we learned
We came in with different skill sets and roles, and learned how to stitch everything together into one working system. We closed gaps between simulation, RL, backend, and UI, and got better at clean handoffs, version control, and testing. We learned how to keep latency low, make small messages that still carry the right info, and design simple dashboards that are useful. We also learned how to scope fast, cut nice to have features, and focus on the parts that make the demo reliable. Most of all, we learned how much faster and better we are when we build side by side.
What's next for HazardNet
We are committed to pushing HazardNet forward. Our next steps include:
- Expand hazard types and add weather conditions like ran, snow, ice, and low visibility.
- Run more reliable training with larger maps.
- Add full autonomous driving scenarios and better safety gates with TTC and comfort rules.
- Add vehicle health sharing, if a self driving car detects a fault like brakes or sensors, it can broadcast a simple alert so nearby autonomous cars increase gap or take over.
- Improve the car experience with voice shortcuts, alerts you can trust, and simple controls.
- Grow analytics utilizing heatmaps, trends, and road segment scores to guide maintenance.
Built With
- assemblyai
- elevenlabs
- flask
- gemini
- javascript
- python
- react
- sumo
- typescript
- vite


Log in or sign up for Devpost to join the conversation.