Inspiration
Our teammate Shaurya's close friend Francis, has a grandmother who is blind, and her experience navigating the world inspired us to build something to support people like her. When we learned that this year’s Hack the Ridge theme was accessibility, we were excited to channel our skills into a project that could genuinely improve everyday mobility for visually impaired individuals. That is how HAPTICK was born: a way to apply our technical knowledge to a real, human-centered problem.
What it does
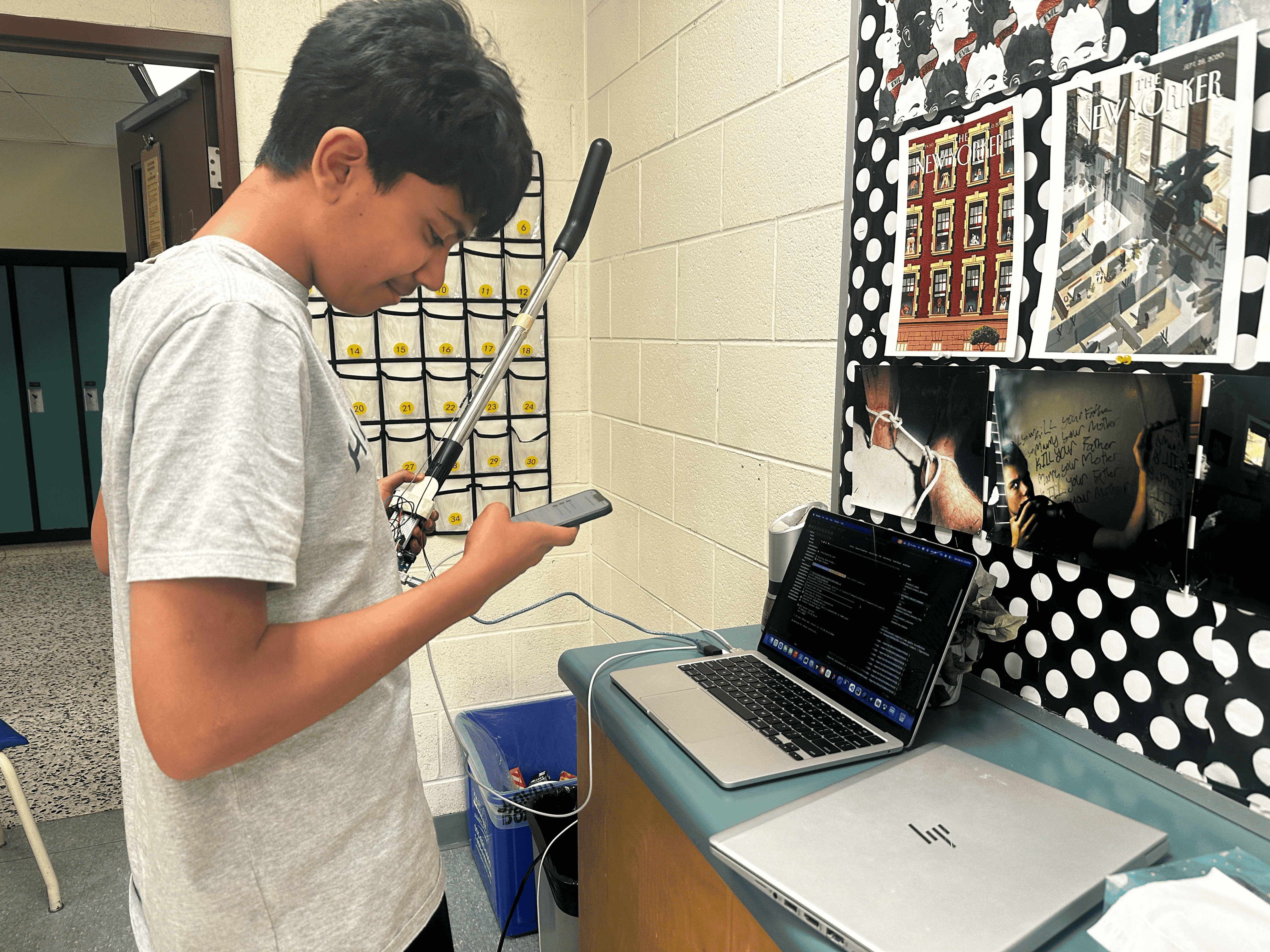
HAPTICK is a smart walking stick that assists blind and visually impaired users with obstacle and range detection. A rotating ultrasonic distance sensor, mounted on a servo motor, continuously scans the forward and peripheral environment to give the user an extended “field of view” compared to a traditional white cane. When an obstacle is detected, HAPTICK provides directional audio feedback: a higher-pitched tone indicates an obstacle on the right, while a lower-pitched tone indicates an obstacle on the left, allowing the user to quickly distinguish where the hazard is.
To improve reliability, HAPTICK uses a built-in debounce system that filters out noisy or inconsistent distance readings from the ultrasonic sensor. This greatly reduces false alarms and prevents rapidly changing or incorrect directional alerts. When an object is confidently detected, the servo motor stops and locks onto the obstacle’s direction so that the audio signal clearly indicates where the user should focus their attention.
How we built it
At the core of HAPTICK is an Arduino microcontroller, which handles reading from the ultrasonic sensor, controlling the servo, and generating audio feedback through a buzzer. Although the Arduino is not the most powerful microcontroller available, it allowed us to quickly prototype and implement the main features within the hackathon’s time constraints. The sensing system is mounted on a sturdy stick or pipe, which serves as the physical base of the device and provides both stability and a familiar cane-like form factor for the user.
We configured the ultrasonic sensor on a servo to sweep across roughly 120 degrees in front of the user, capturing distance data across the frontal and peripheral regions. Custom Arduino code then processes these readings, applies debounce logic over time, and maps validated obstacle positions to different audio frequencies depending on direction. This combination of mechanical scanning and software filtering makes the stick more informative and less noisy in real-world conditions.
Challenges we ran into
Our initial design included a microSD card reader and DFPlayer module to play AI-generated voice prompts that would verbally describe the environment to the user. In practice, however, integrating the microSD system with the Arduino proved unstable: each attempt to wire and use the module caused crashes that disrupted the main detection loop. Given the limited time, we decided to simplify the design and focus on a reliable tone-based feedback system instead of full voice narration.
We also experimented with an iOS companion application to extend HAPTICK’s capabilities. The current implementation, however, depends on using a carry-on power source to keep the system running, which limits portability and makes the setup less practical for everyday use. Balancing power consumption, hardware reliability, and user experience under tight hackathon deadlines was one of the most difficult aspects of this project.
Accomplishments that we’re proud of
Even within a short timeframe, we achieved several important technical and design goals for HAPTICK. We successfully implemented approximately 120 degrees of frontal coverage, significantly widening the effective detection area compared to a static forward-facing sensor. We also designed a directional audio system where the buzzer’s frequency changes depending on where the ultrasonic sensor is pointing, enabling users to distinguish left versus right obstacles using only sound.
Our debounce system dramatically improved detection accuracy by smoothing out spurious or rapidly fluctuating sensor data before triggering alerts. Additionally, the servo motor’s ability to stop and lock onto a detected object helps the user understand exactly where the obstacle is located. Bringing together all of this functionality into a lightweight, portable walking stick form factor is something we are especially proud of, as it demonstrates both technical depth and real-world usability.
What we learned
Throughout this project, we learned how crucial teamwork and communication are when working under pressure. There were several moments when we hit creative blocks or ran into unexpected hardware issues, but coordinating tasks, discussing ideas openly, and dividing work more effectively helped us push through. We also gained valuable experience in rapid prototyping: going from concept to a functional physical device and companion app in a short period of time.
We learned first-hand the importance of time management, especially when integrating multiple hardware and software components. In future projects, we plan to scope complex features more carefully, prioritize core functionality earlier, and create clearer milestones so that we can iterate more confidently. Most importantly, we deepened our understanding of accessibility needs and how thoughtful design choices can make assistive technology more intuitive and empowering.
What’s next for HAPTICK – The Walking Stick for Tomorrow
Looking ahead, we want to revisit our original vision of providing rich, spoken feedback using an AI-powered voice system that can describe obstacles and surroundings more naturally. This will involve choosing a more capable microcontroller or offloading audio processing to a dedicated module to avoid the crashes we experienced. We also plan to improve the power architecture so that the device and its companion app can operate without relying on a carry-on power source, making HAPTICK more practical for daily, independent use.
Beyond hardware upgrades, we hope to collaborate with blind and visually impaired users, as well as accessibility experts, to refine HAPTICK’s ergonomics, audio cues, and overall user experience. In the long term, we envision integrating additional sensors, such as GPS or camera-based systems, and possibly connecting to smartphone apps for navigation assistance. HAPTICK is currently a prototype, but it lays the foundation for a future where smart walking aids are more affordable, intuitive, and widely accessible.


Log in or sign up for Devpost to join the conversation.