-
The HandsFree Horseman
Inspiration
The team wanted to create a project that required everyone on the team to learn something new. We also wanted to be able to demonstrate a concept that will be important in the fields of robotics, virtual reality, and augmented reality.
What it does
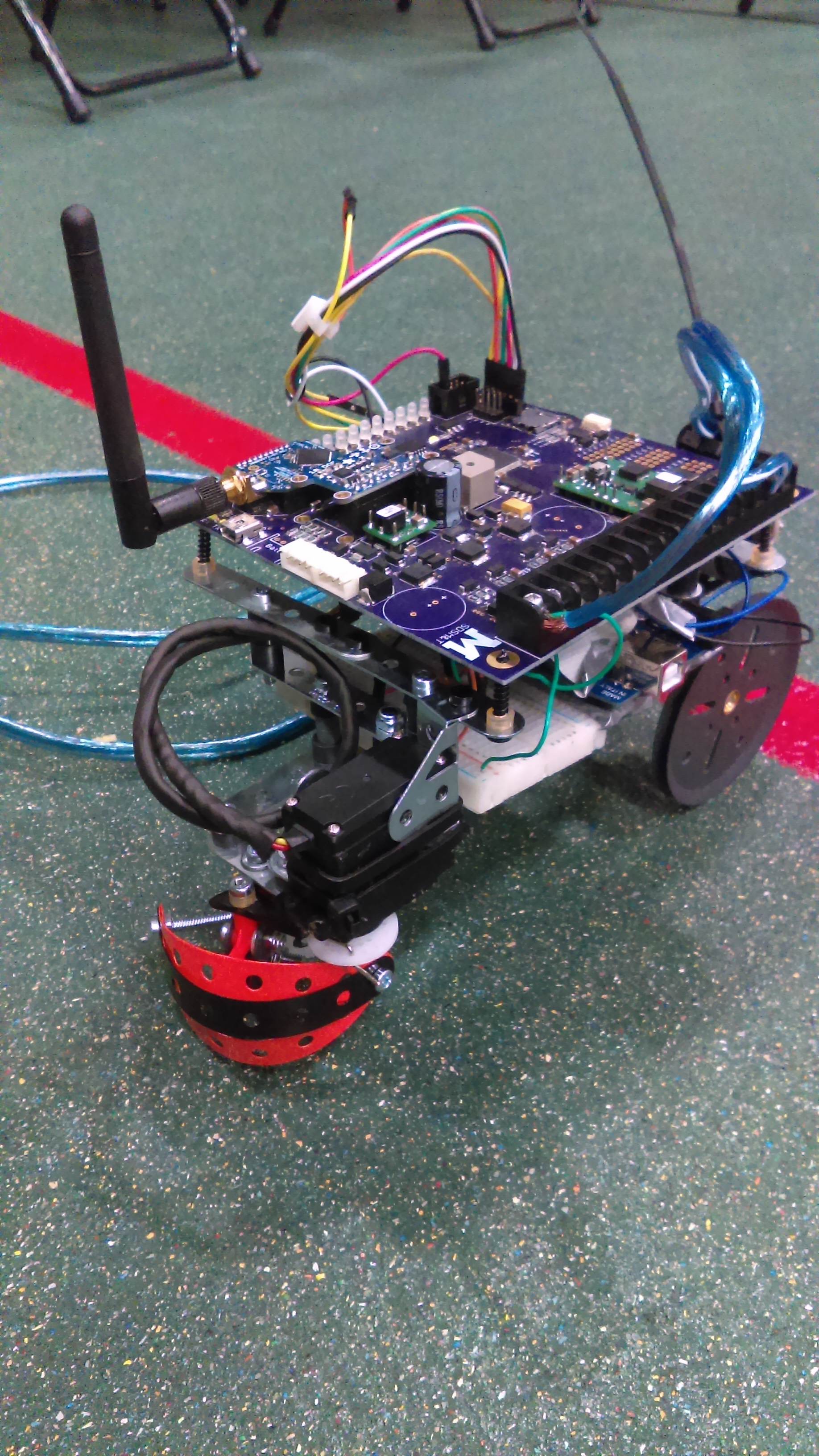
Our project is a car/vehicle that is remote controlled by a Leap Motion sensor. Our control code allows the user to push and pull the vehicle forward and back, left and right.
How we built it
We separated the team into divisions of what each team member wanted to learn. Martin was interested in constructing the car and assembling the control circuitry. Eunice was interested in writing the Arduino component control software. Courtney wanted to write the wireless data transmission code. Michael wanted to write the Lap Motion API. Using C code for the Arduino controller and Python for the Leap Motion input, each member of the team built there respective portion of the project and came together in the end to assemble and debug the final system.
Challenges we ran into
Hardware hacks have a peculiar challenge that software hacks do not: bugs manifest in the software and hardware. We ran into challenges getting our wireless modules to properly communicate and getting the Arduino to properly receive the serial data. We also had issues getting our power supply to the correct voltage to drive the DC motor. The biggest hurdle the team overcame was every member having to entirely learn the part of the project he/she worked on. Having mentors available was a significant help: providing knowledge, troubleshooting, and, in one case, providing extra hardware. The team overcame these hurdles with flying colors and hands in the air.
Accomplishments that we're proud of
Our team performed in wonderful conjuction for the whole of Carlhacks. This was the biggest accomplishment for us. Aside from that, the final product exceeded the team's expectations and performs to its design expectations and proves a concept that, when properly translated to other systems (quadcopters, robotic hands, etc.), will provide a powerful, intuitive system for mechatronic and robotic control of the physical world.
What we learned
Every team member learned a new skill at this hackathon. Software people got hardware experience and vice versa. The team also learned that, when there is a weekend devoting to expanding its members' skill sets, each person can grow significantly and accomplish amazing things with systems he/she has no experience in.
What's next for Hands-Free Horseman
The team intends to continue developing this product, increasing its robustness, improving the user interface, and expanding the platforms that can implement this control system.



Log in or sign up for Devpost to join the conversation.