-
-
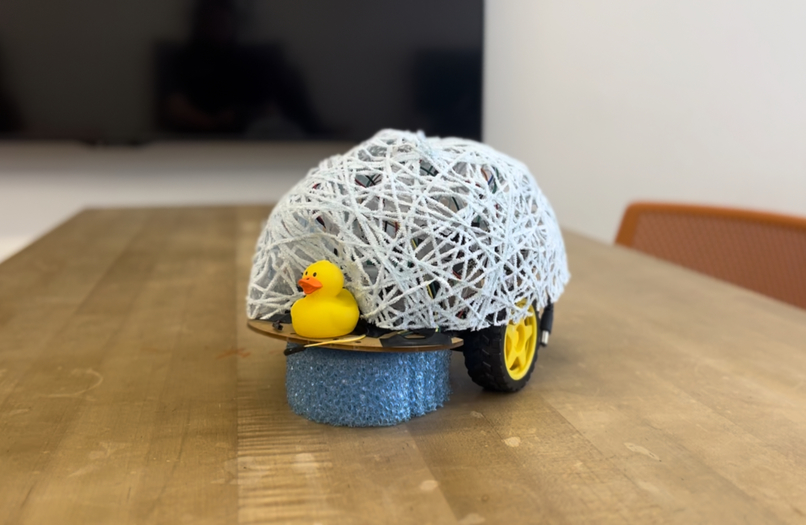
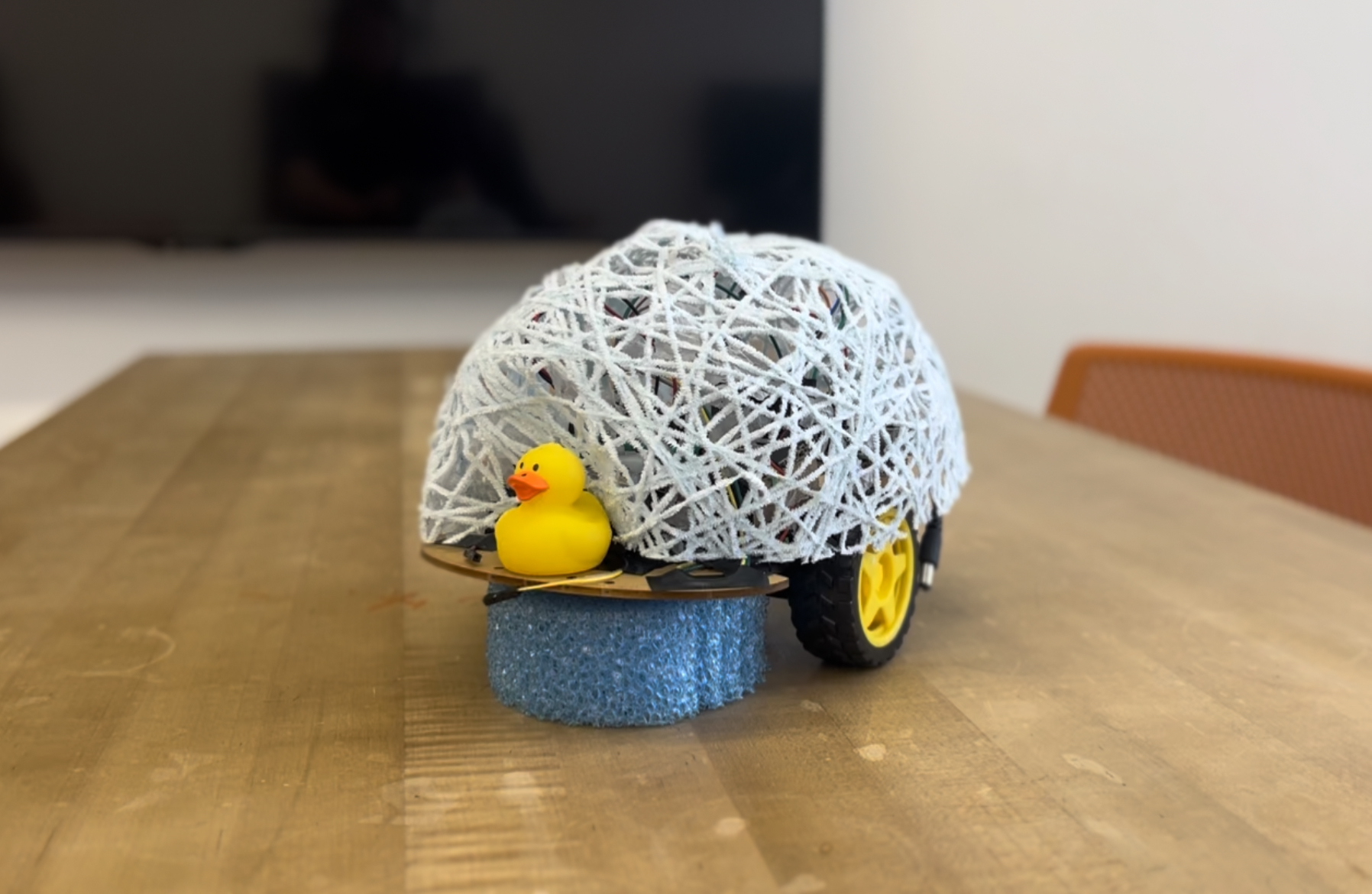
The HandiClean Rover
-
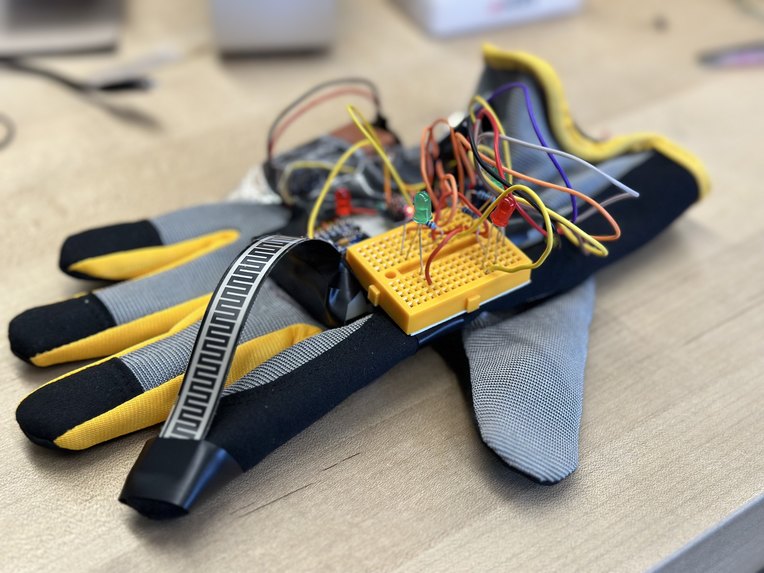
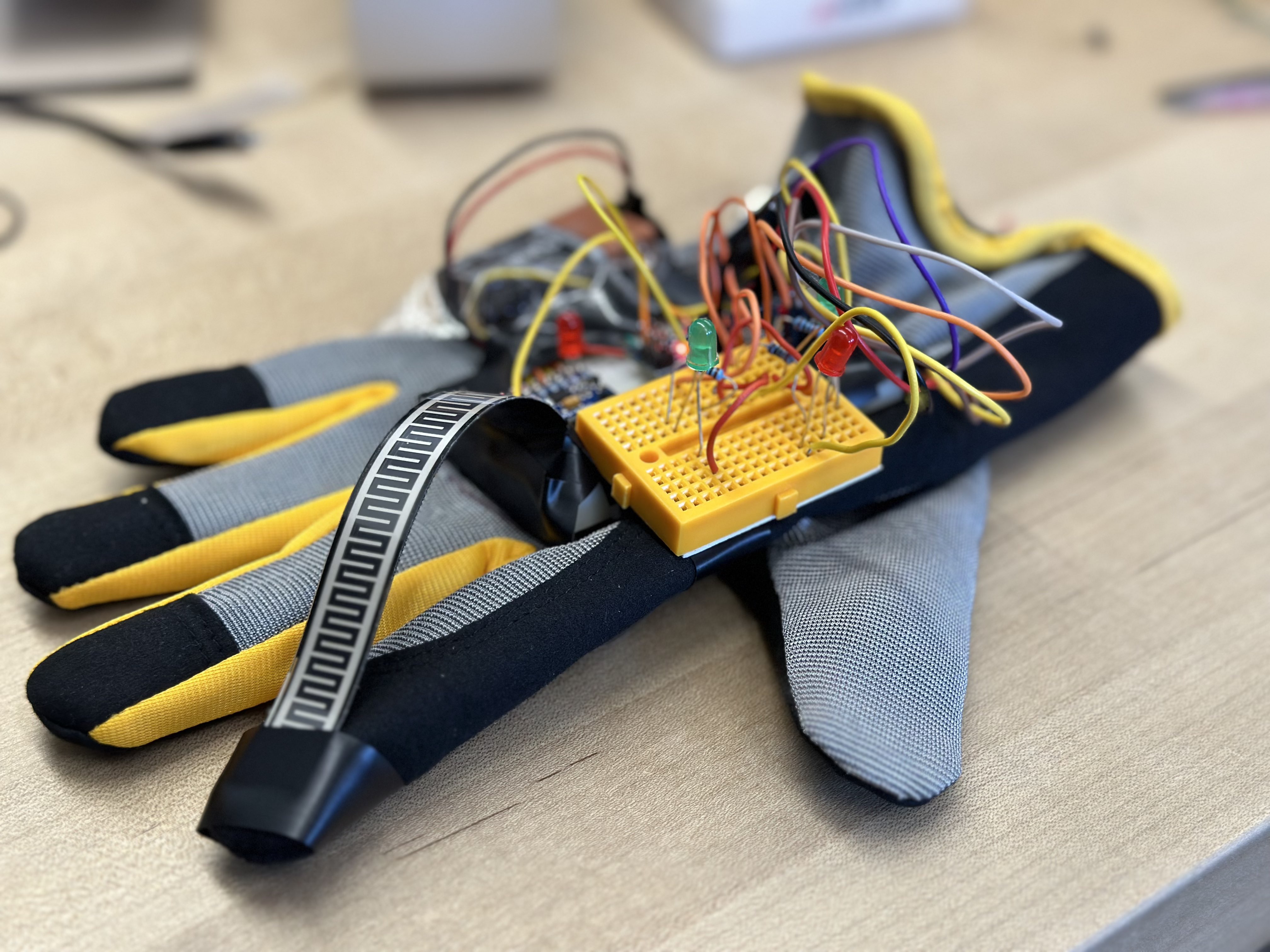
The Smart Controller Glove
-
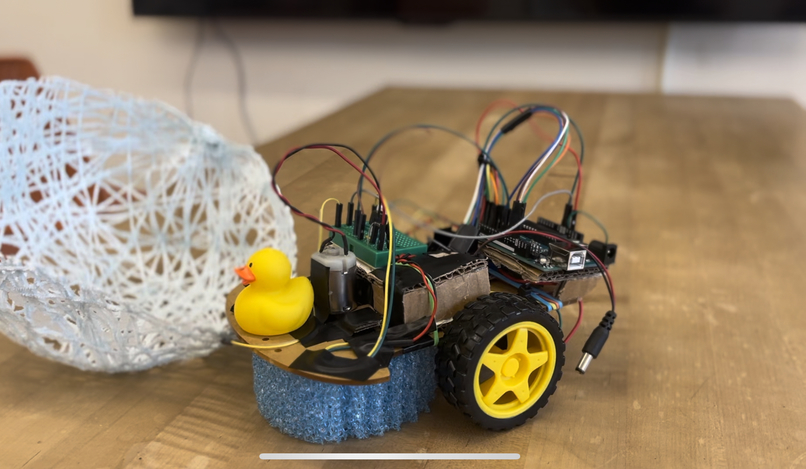
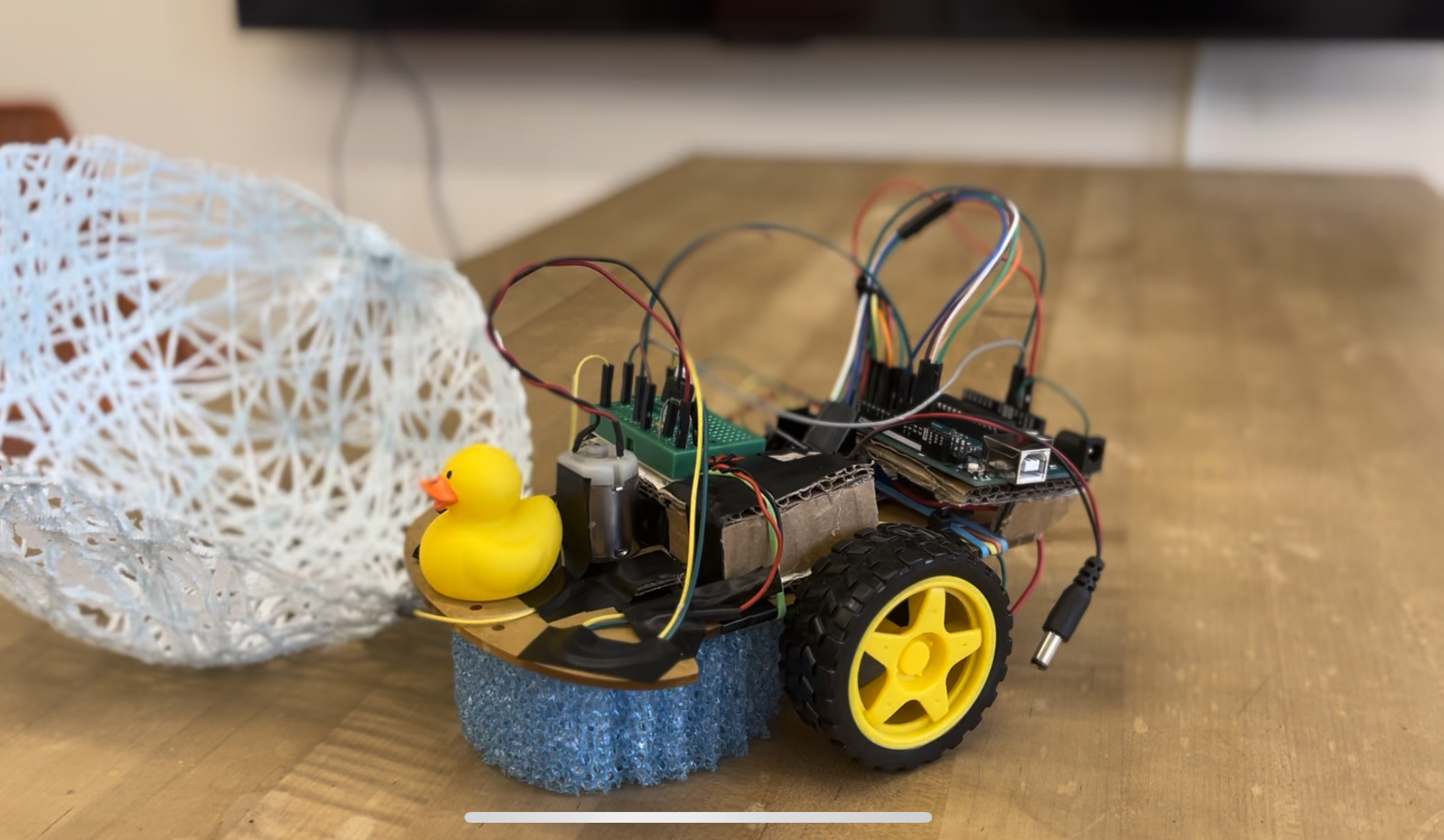
The HandiClean Rover Internals
-
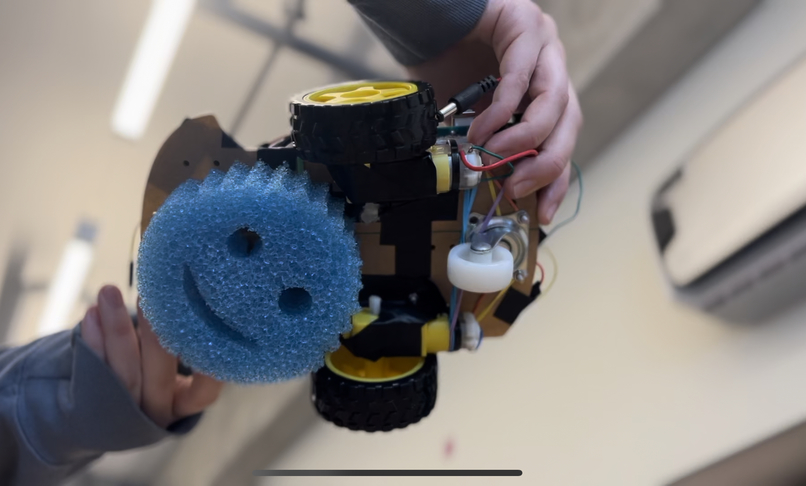
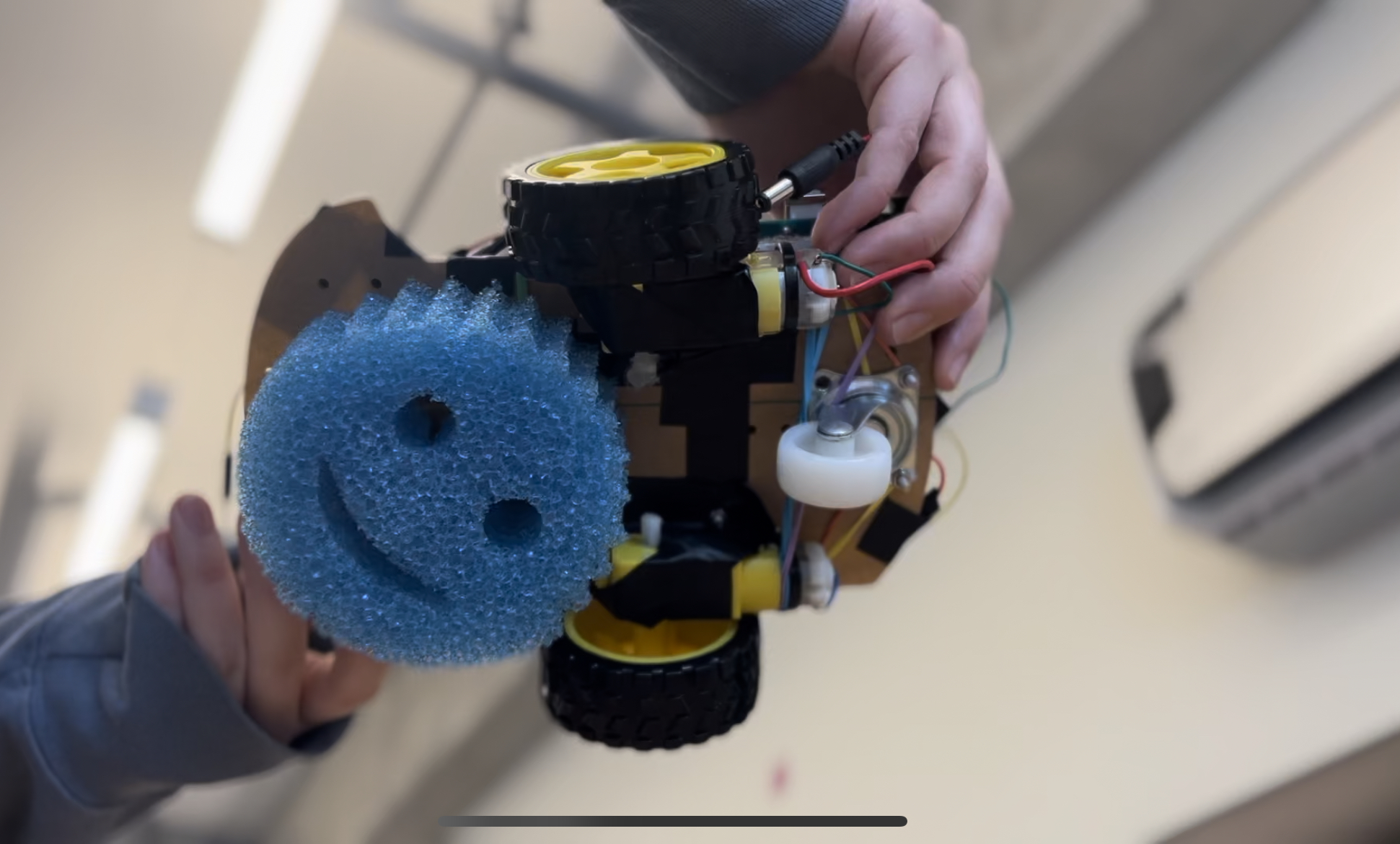
Underside of the HandiClean Rover
Inspiration
Our inspiration for this project was the vast number of individuals in the world who struggle with, or are physically incapable of, cleaning various surfaces and hard-to-reach areas in their house, such as under cabinets, or on tables. Our project was meant to be a way to make cleaning easier, and more accessible to everyone.
What it does
Our project acts as an intuitive and simple way to clean hard-to-reach areas in one's household. To operate, the user simply puts on the Smart Glove Controller, which is equipped with a finger-based flex sensor, and a 3-D gyroscopic sensor. Together, these sensors detect the angle of the user's hand, to determine the motion of the cleaner, and the bend of the user's index finger, to toggle the spinning sponge.
The Cleaning Robot itself is equipped with a spinning sponge, which can be used to dust and clean hard-to-reach places.
How we built it
The project consists of 3 main integrated builds: The Smart Controller Glove, The Remote Rover, and the Wireless Transceiver Communication Modules.
The Smart Controller Glove The glove controller centers primarily around two Arduino components: a flex sensor, and an MPU6050 gyroscope/accelerometer module. The MPU6050 takes in raw data from the orientation of it in space, such as angular velocity, and directional acceleration. Using these values, an Arduino Nano Microcontroller performs calculations involving trigonometry and integration to determine the angle of the gyroscope. This angle has corrections applied to it before being transmitted out. The flex sensor determines when the user's index finger is bent, and sends a signal accordingly.
The Remote Rover There are 3 motors on the rover. This consists of 2 hobby driving motors and the single motor. The two hobby motors are connected through different pins in a L298N motor driver and into an arduino uno and are fed information based on if the desired direction is forward, backwards, right, left, or stop. The motors are fed an analytical read signal which determines the desired speed. The motor for the sponge is controlled through a transistor and a diode to limit the feedback voltage into the same arduino uno as the hobby driving motors. The motor is then fed a value which controls the speed that it rotates at.
Wireless Transceiver Communication Modules The Wireless Transceivers established a connection between a one-way transmitter on the glove and a one-way receiver on the rover. After determining the pieces of data that needs to be transmitted to control the rover (namely, the gyroscope roll and pitch, and the flex sensor data), we send the sensor data through the channel. After the receiver obtains the sensor data, the rover does calculations to determine what signals to send to the motor controllers.
Challenges we ran into
The mechanical features of our rover gave us a substantial amount of challenge throughout the hackathon. At first, we needed male-to-female jumper wires for a large amount of components to be connected (such as the radio and the motor controller). This resulted in a lot of wire management that needed to be managed on the relatively small chassis. In addition, implementing the motor controller in a way that keeps the wheels balanced was also difficult, as we did not have an axle to ensure the wheels moved together. This meant we had to determine the correct ratio to ensure our rover could move forward straight. Additionally, finding the a proper correction ratio for the gyroscope angle proved challenging, and required numerous iterations and adjustments.
Accomplishments that we're proud of
We are proud to have completed our full plan, not having to cut aspects of the design out. Additionally, we are proud with how well-coordinated our team was throughout the process. As opposed to having trouble trying to integrate our components, our team coordinated and communicated throughout the 24 hour design process, which allowed for seamless integration: taking less that 20 minutes to connect the 3 major components together. Additionally, this was our first makeathon, and we are very proud of our success in designing something challenging, yet very rewarding.
What we learned
As ECE students, it was definitely a challenge taking the mechanical components into account when creating our physical models. Working with the rover there were many issues getting the wheels to move on the proper axis. With limited equipment, we had to connect our components in a way that the correct amount of voltage was distributed to each part. There was a lot of desired documentation, opensource code, and datasheets that are available to us that we tested with. Using physics to calculate data in 3D space was an unexpected aspect that was taken on during the process. We learned end to end hardware to software integration using Ardiuno.
What's next for HandiClean
If we continue this project, there are a few major changes we would make: We would change the chassis of the rover to allow the connections in a much smoother, and balanced manner. This way, we would not need to worry about weight distribution as much, and the wheels and motors can be placed in more convienent locations Additionally, we would use a larger glove for our controller, as it would allow more room to place our components. A minor issue that appears with the glove was that it was very cramped, making this difficult to debug any wiring issues, and made the glove a bit difficult to work with.

Log in or sign up for Devpost to join the conversation.