Inspiration
A member of our team's grandfather has cataracts and noticed how difficult it is for him to avoid obstacles in his path so we hope to assist him and all those in his similar situation by building a guidebot which can help them move from place to place for both small and long distances also capable of avoiding obstacles in its path.
What it does
Our project is capable of utilizing an infra red controller and sensors to move in the directions specified by the user. It is capable of automatically avoiding obstacles in its path and taking the user from one building to another using opensource and google maps APIs. In addition it’s environmentally friendly by its use of a solar panel as a power source.
How we built it
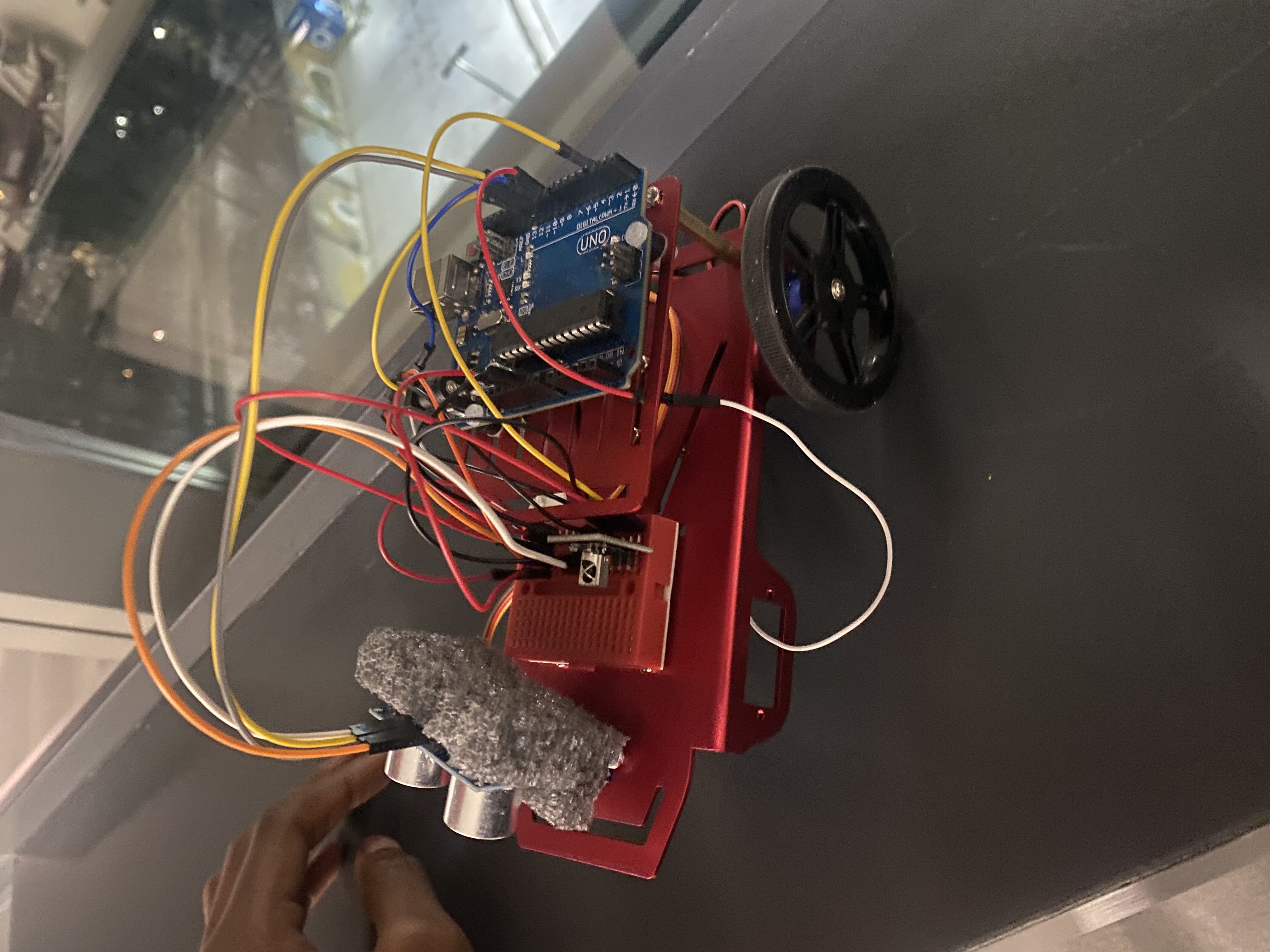
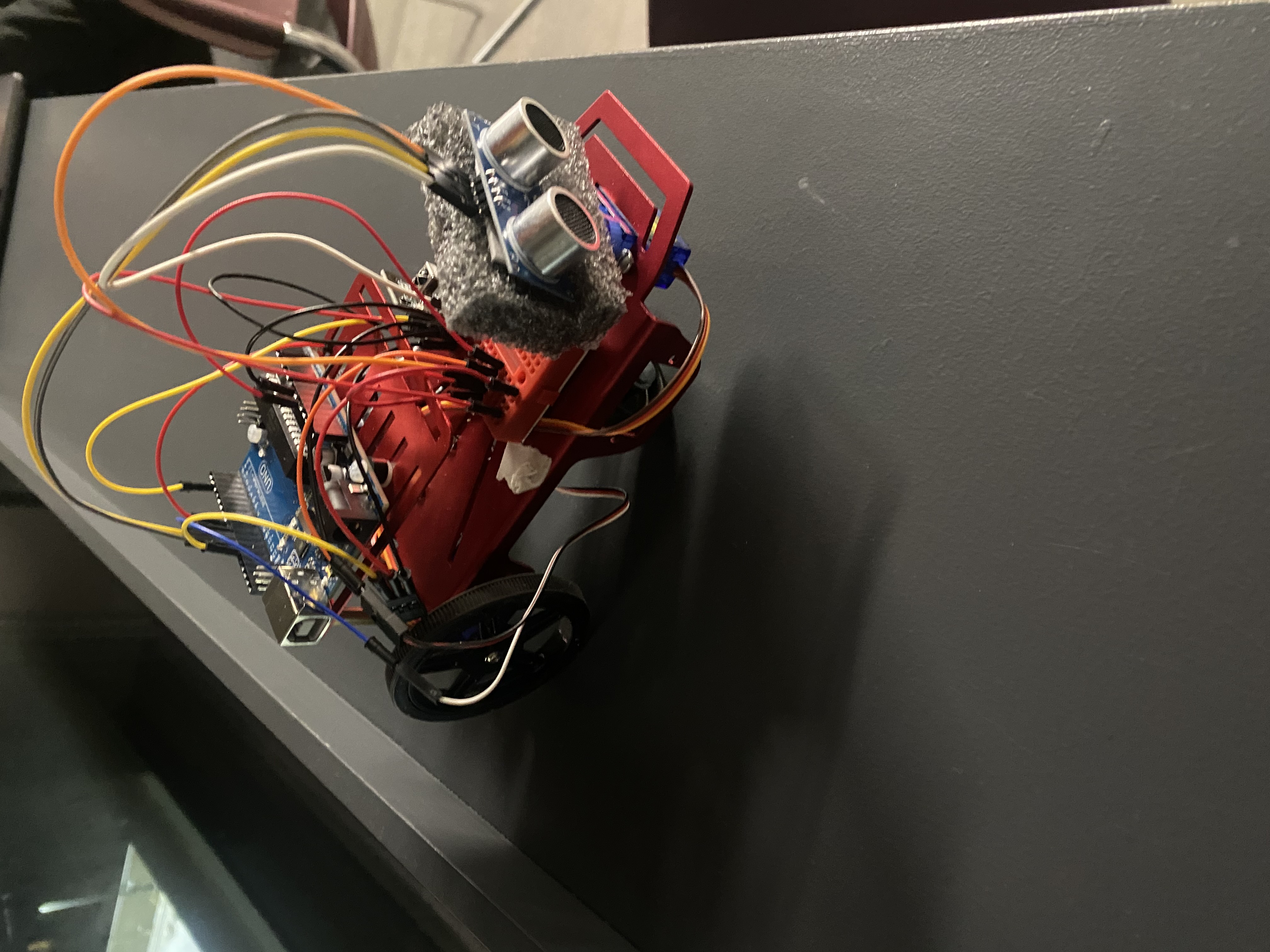
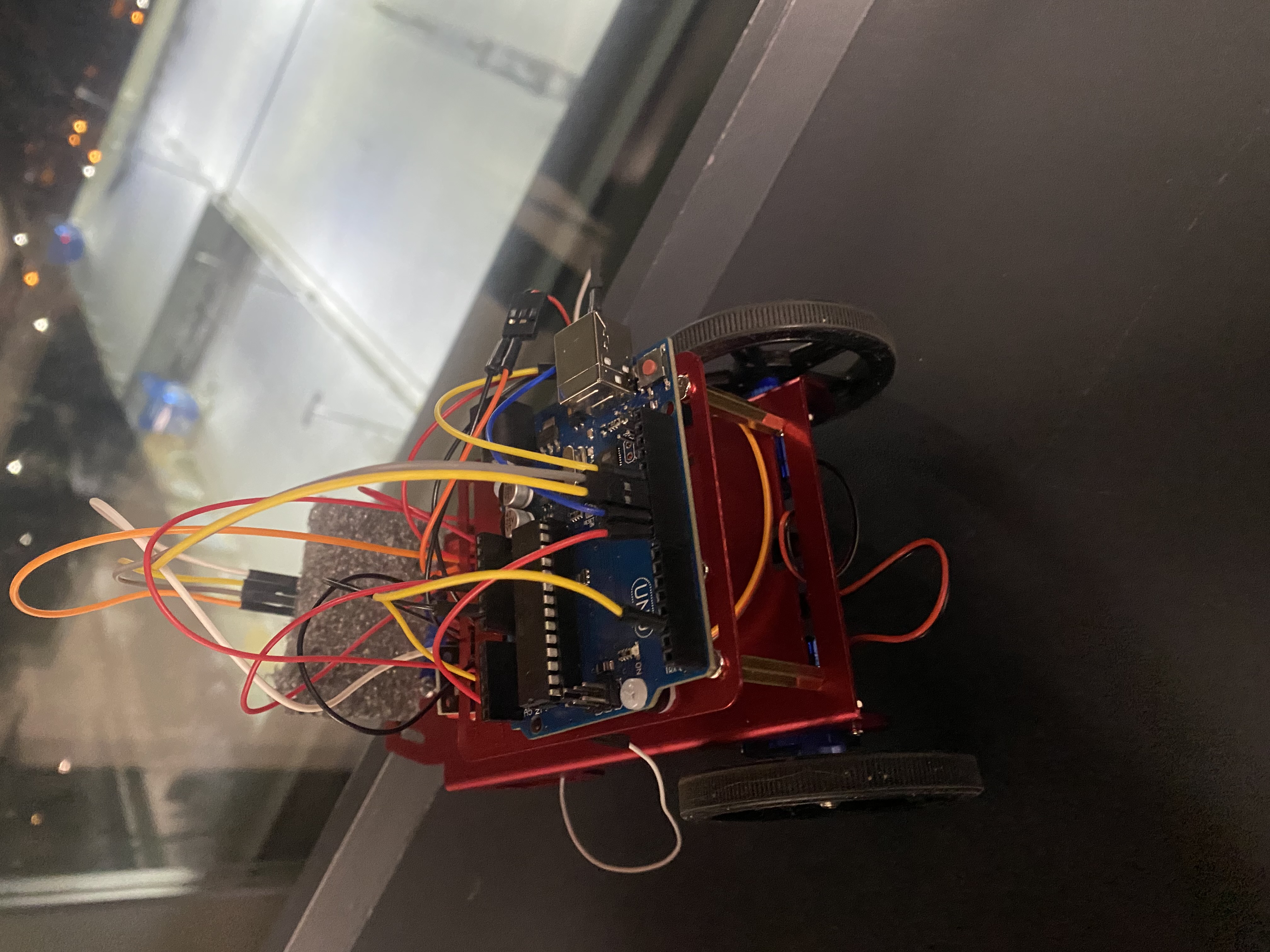
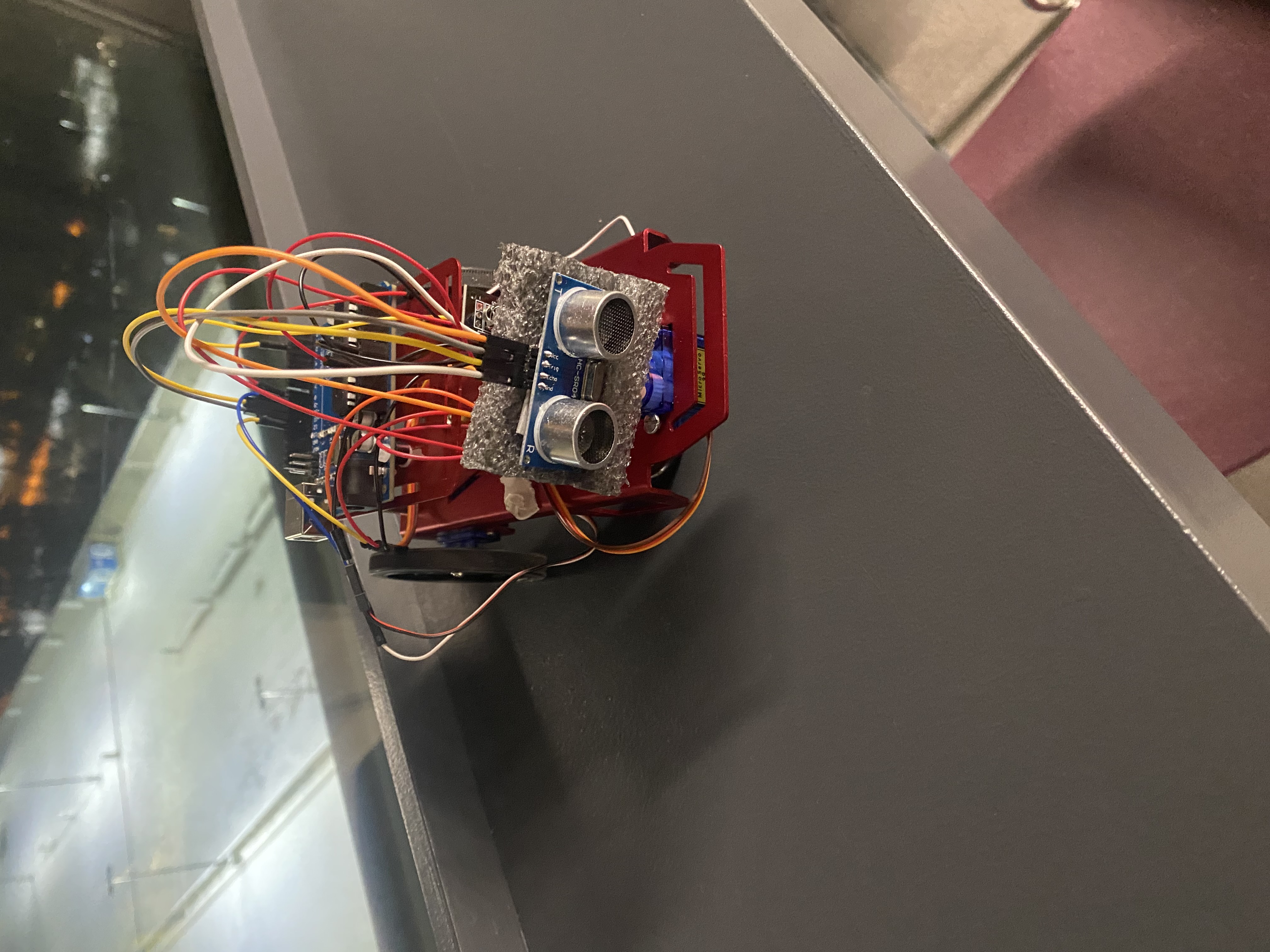
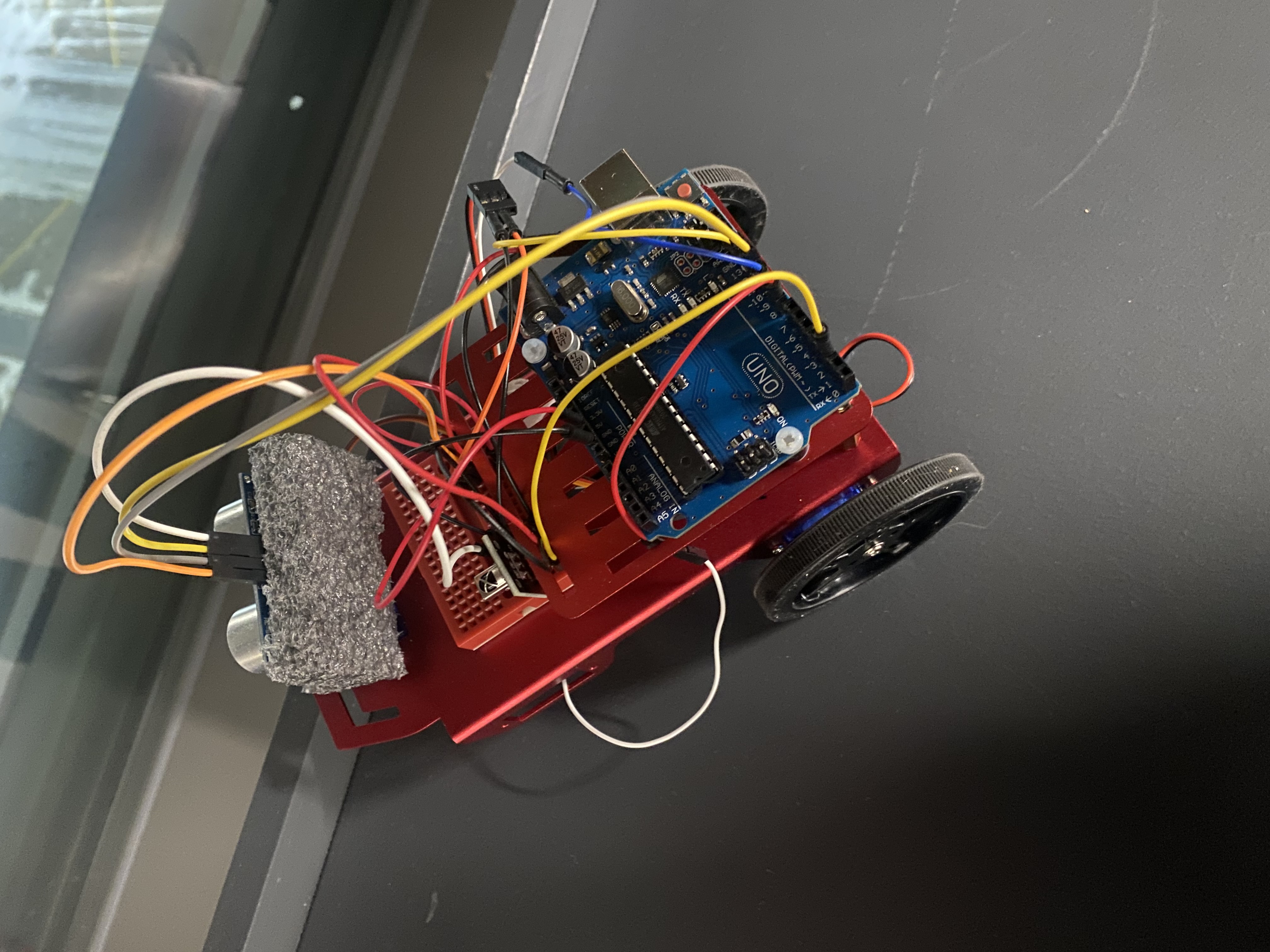
-Using Python Googlemaps API and openrouteservice API, regarding the directions serviceswe hardcodded some common places for the person in the arduino code. The common locations included the addresses for Hub Mall, ETLC, CCIS, Home and Lister Residence. We used googlemaps API geocode function to handle geocoding for all the addresses to longitude and latitude format then we used the free openrouteservice API to get the walking steps using the current location coordinates and the final destination coordinates to reduce cost.To communicate between the python code and the arduino we used the serial port and the pyserial module. In the Arduino code we included the feature to read those walking steps and execute accordingly, to calculate the distance for the arduino robot we used the specific conversion rate. -Using Arduino and C++, we programmed the robot to move when and where was instructed by the user using the infra red remote control and to avoid obstacles in its path. We also added a solar panel on a motor which is able to detect where the maximum light intensity is and rotate the motor to optimize power to the solar panel as a way of integrating free energy. -Using the Feetech 2WD/4WD Mobile Robot platform kit, an arduino uno board, an ultrasonic sensor, a servo motor, 2 dc motors, a solar panel, 2 photoresistors and a bunch of jumper wires, we assembled the hardware body of the robot as shown in the images.
- To maximize the power available through the solar panel, we used a combination of two LDR’s and a server motor to track the sun’s movement on the go. The 2 LDRs at each sides of the solar panel act as signal inputs which determines the position the sun by the amount of light each LDRs receives. Using conditional statements and a servo motor, we are now able to redirect the solar panel.
## Challenges we ran into
-The first challenge we faced was simplifying the result from the google maps and open route service API to arrive at readable coordinates and simplifying those results to be user-friendly.
-The next challenge we faced was initiating and handling client server communication between the python code and the arduino, to solve this issue we had to go into the documentation of both languages regarding the serial monitor.
-The third problem we had was receiving and understanding the directions gotten in the arduino and enabling it to replicate those instructions.
-Another issue we encountered was figuring out how to address the issue of what should happen when the bot is too far away from the user, this was fixed by attaching a buzzer which has a singular sound intensity and when the sound of buzzer seems low the user should tell the bot to stop.
-The final issue encountered was during the build of the hardware guide bot.
Our early shortage of hardware components was one of the biggest problems we encountered during this hackathon. However, one of the hackathon mentors came to our aid and support quite fast.
In addition, we ran into issues with the guide bot's eyes—the ultrasonic sensor—and its IR proximity sensors throughout construction. We also experienced issues with motor and power failures, as well as issues with connectivity and communication between the microcontroller and other sensors. The successful operation of the guide bot required troubleshooting and rethinking these problems.
## Accomplishments that we're proud of Being able to fully integrate APIs into our project, Being able to efficiently search, read and implement the documentation of various modules and libraries to solve our issues, also being able to successfully make the guidebot controllable by the infrared controller, alerting the user when obstacles are close and buzzing in a specific sequence to inform the user of the next free path, and able to automatically avoid obstacles in its path. ## What we learned Integration of APIs into arduino, obstacle evading program for arduino and making a program for an infra red controllable arduino ## What's next for HackED 2024 Winning!!!





Log in or sign up for Devpost to join the conversation.