-
-
front
-
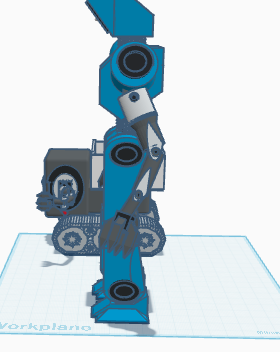
right
-
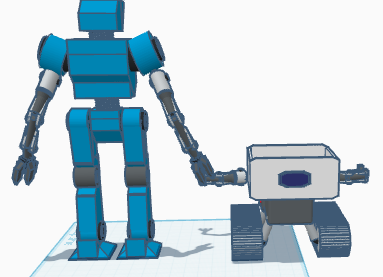
back
-
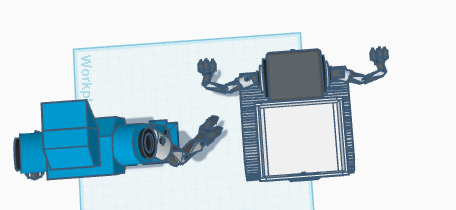
top
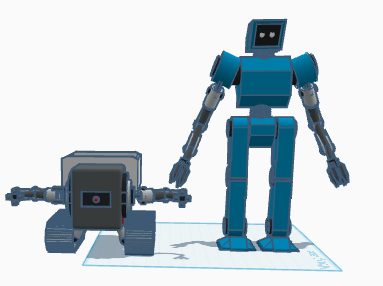
What inspired us to make these robots was the fact that they can cut costs for human labor and allow for an easy working system and environment overall. What I learned is that fusing data from multiple sensors is more about relentless calibration and timestamp sync rather than fancy algorithms. To make our project we needed to make a mobile base, make a camera, also make a navigation platform so that it can know where to navigate in the warehouse, handle on-device speech recognition that passes parsed intents to the microcontroller, we also had to make robotic arms for the robot and an adaptive gripper to fetch, lift, and place requested items. challenges that we had were synchronizing real-time sensor data, timestamp glitches balancing the gripper strength and delicacy, and figuring out the right components to build and design the robot.
Built With
- english
- tinkercad.com

Log in or sign up for Devpost to join the conversation.