-

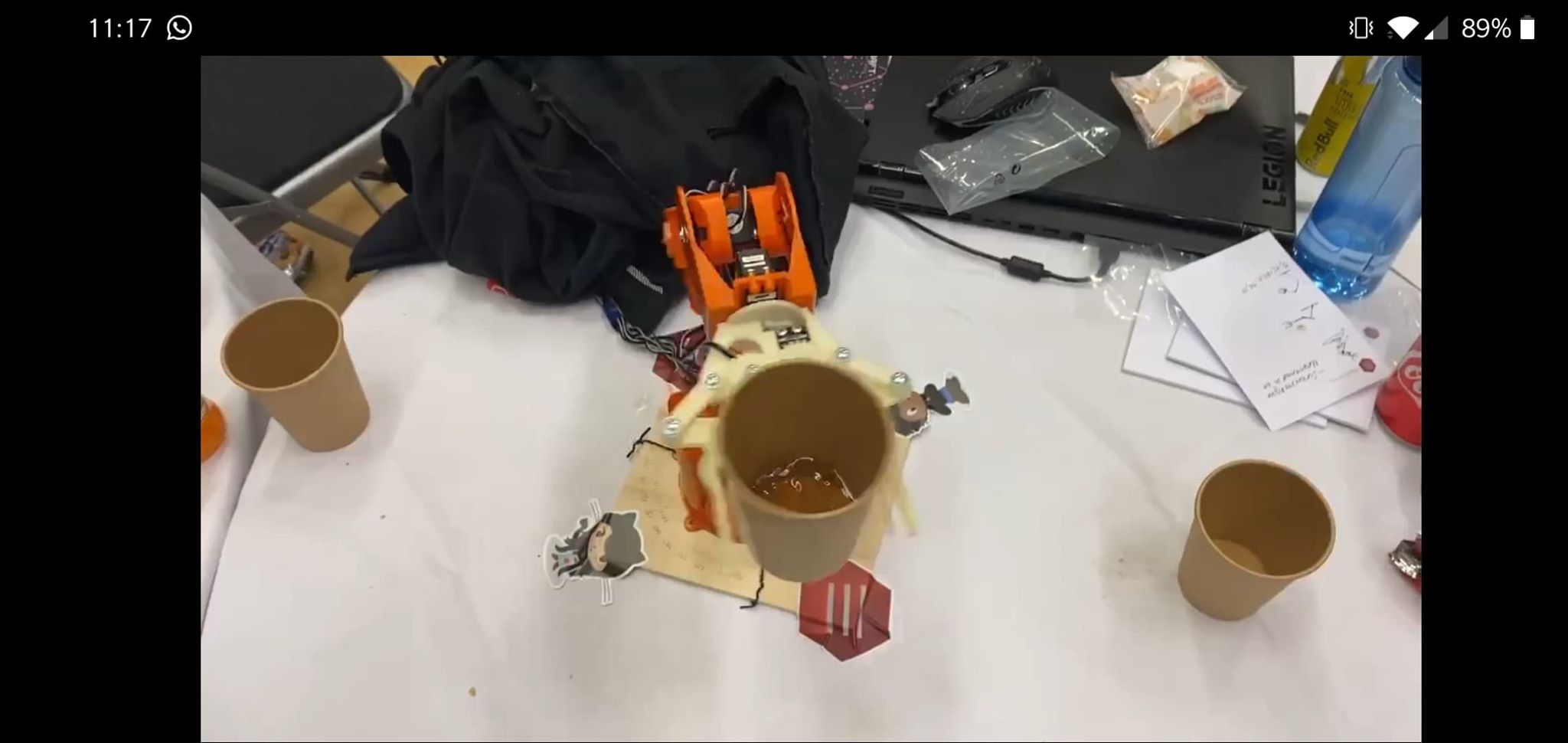
Result after shaking the drink
-

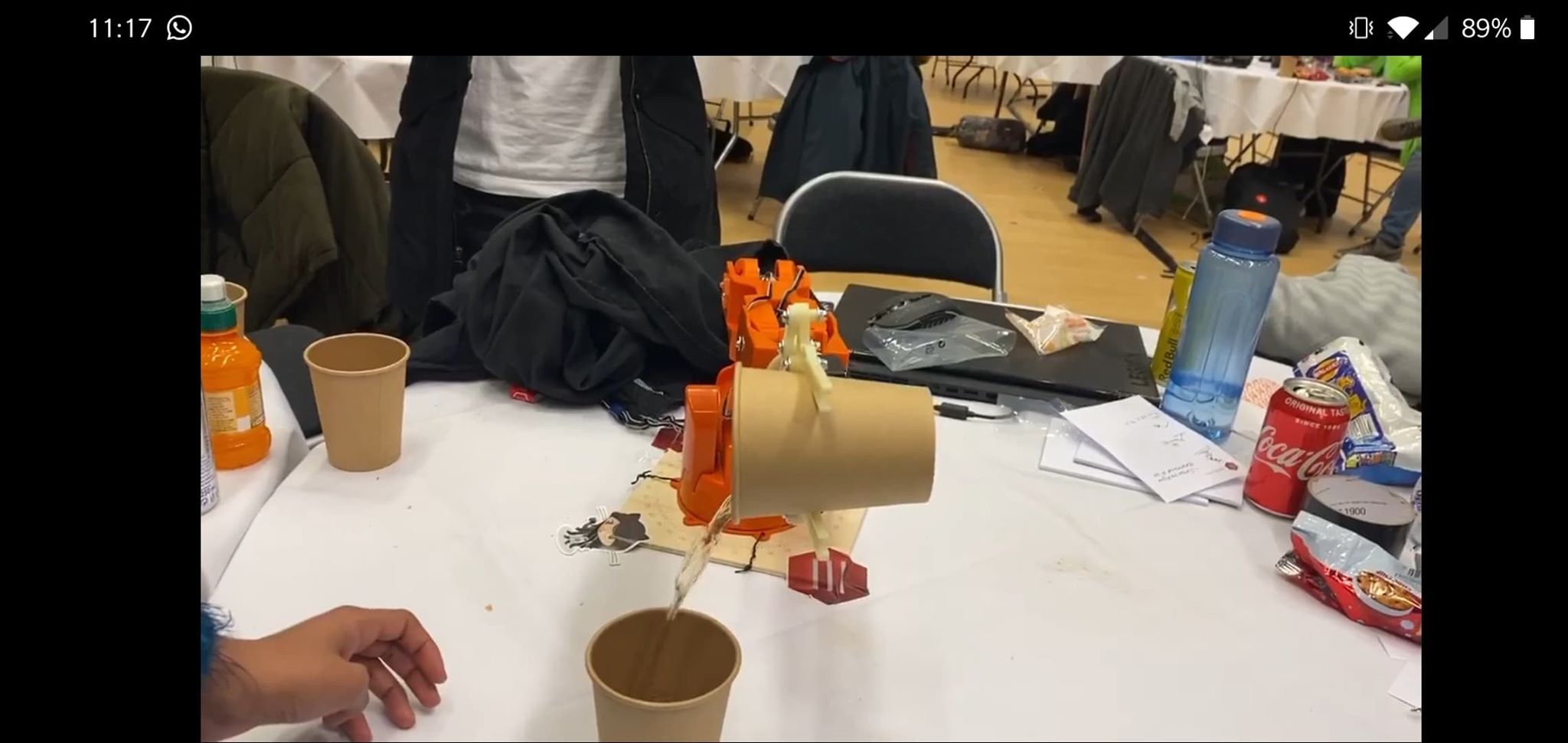
Pouring the left cup
-
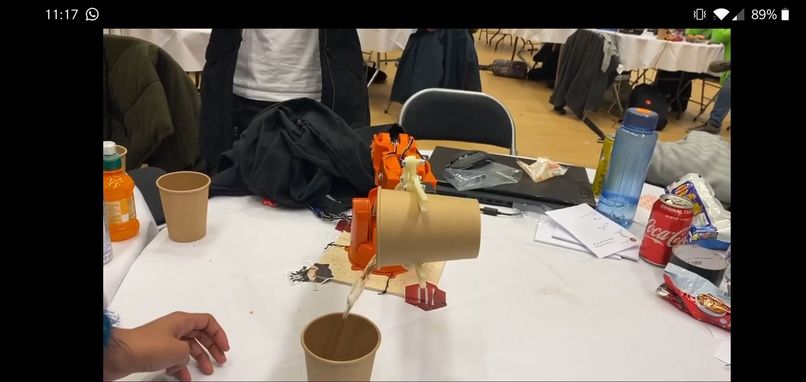
Pouring the right cup

Inspiration
We were inspired by incorporating robotics into our projects because it was very interesting to us. We also have a bartender on our team and we enjoy drinking so we thought this would be a cool project to work on.
What it does
The robot arm is able to pick up cups and pour liquid into another cup and place it back down. The code currently pours two cups into a middle cup, then picks up and shakes the middle cup to mix the drink. It's able to perform different movements like waving and dancing.
How I built it
Built using C++ in the Arduino IDE using an Arduino UNO board and the Braccio robotic arm.
Challenges I ran into
We had issues with getting a compatible Arduino board for the Braccio but was soon fixed with improvisation. There were some issues where the grip wasn't closing but we fixed this problem after some collaboration and examining the motors. Positioning was tricky to get right but was improved by suggestions from teammates. The arm was very unstable due to screws not being able to screw into the wooden base correctly, but this was solved by a teammate improvising and using stickers and cable ties to keep the base together.
Accomplishments that I'm proud of
We each researched how to build and code the Braccio arm and was able to collaborate and give each other advice on what the arm should be capable of doing. I'm proud of how quickly we learned to operate it considering we've had very little experience with Arduino boards and none at all with the Braccio arm.
What I learned
I learned that it's important for research to be done quickly so we can sort out what components we need to avoid problems coming up during the project.
What's next for Hackathon
Potentially something involving a Raspberry Pi.

Log in or sign up for Devpost to join the conversation.