
gyroDrone
This project is inspired by a senior design project, which the goal is to control a drone using a glove with built in kinematics. We decided to do a variation of the project, with the main components being a gyroscope and an ultrasonic sensor.
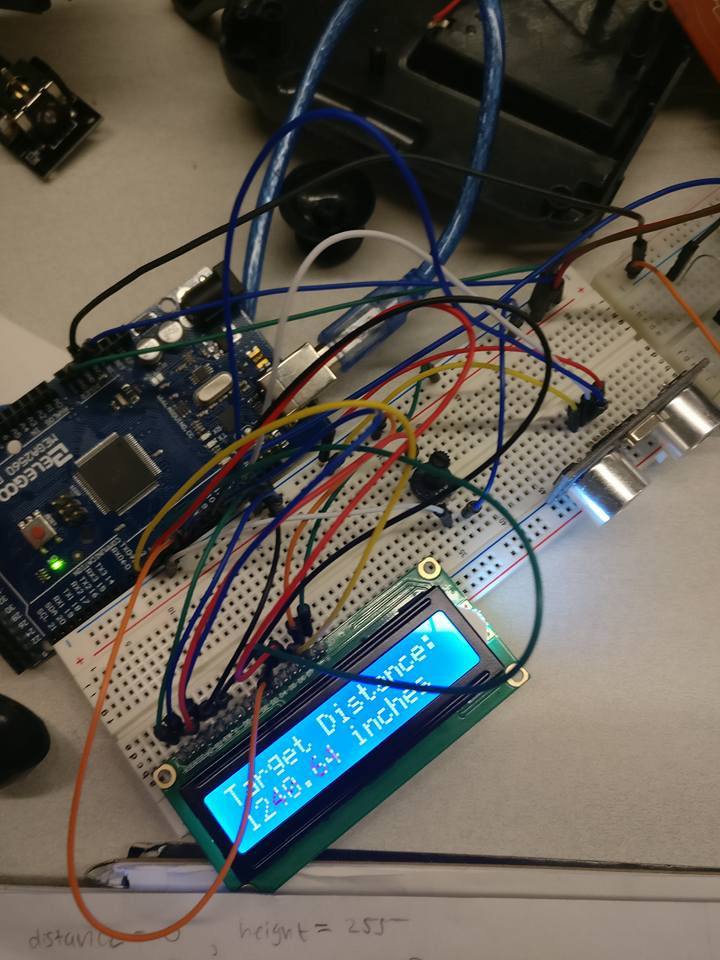
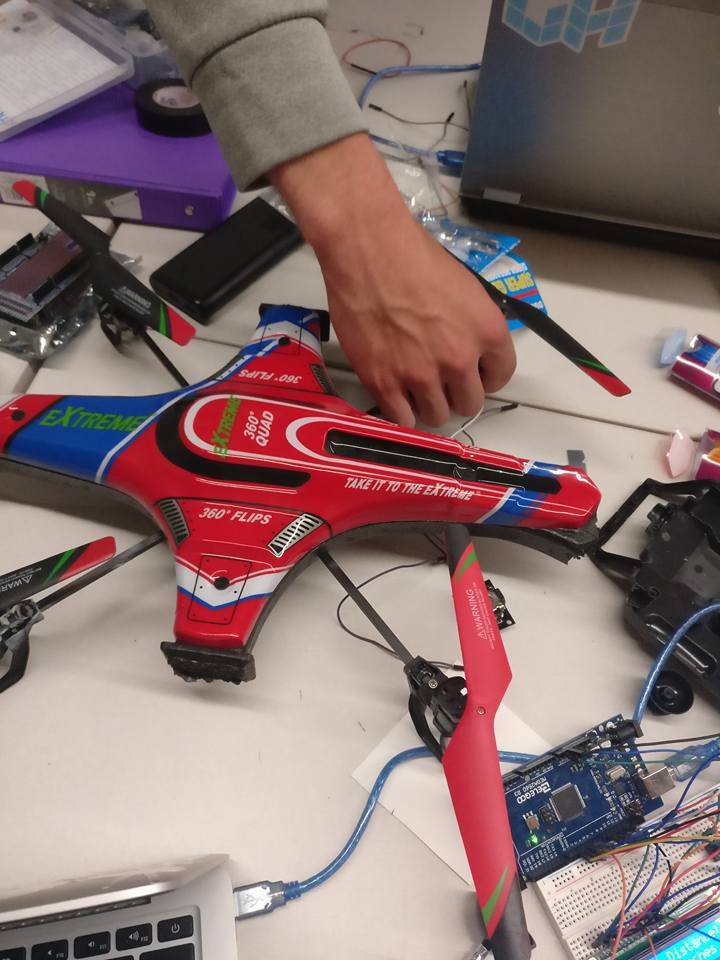
The project starts with a dismantled drone remote control. The control's joysticks are removed and replaced with input wires from the Arduino. However, the input wires from the Arduino are put through a digital analog convertor to convert the PWM output from the Arduino to a true analog output that the micro controller can read. The controls for the drone are an ultrasonic distance sensor and a gyroscope. The inputs from both control units are sent to the Arduino, which processes them and outputs the voltages between 0 and 3.3 to control the drone itself.
The ultrasonic sensor is inconsistent with readings due to it being a hardware issue. For instance, it jumps values drastically which makes the drone unstable at times. Secondly, we had a malfunction on the soldering job on the gyroscope. We also had issues with developing the code to control the gyroscope, and a lack of time to implement rotational controls. Another thing is that the majority of the team was not experienced in Arduino (or C), so it was a huge learning experience. At times, all four of us would be working on the same component at once.
We spent a large portion of time figuring out how the ultrasonic sensor to work. When we finally figured out the algorithm to gradually increase height (power), we synced the program to the drone and it took off. It was by far the most satisfying part of the project.
We ended up breaking several operational amplifiers in the process. We learned how to effectively divide the project into sections while staying on the same page. We also learned quite a bit about Arduino and the electrical components.
This project contains simple forward/backward and left/right motions for the gyroscope. The next step is to implement rotational controls to the left and the right. The last step is to implement sensors on the drone to make it run autonomously.



Log in or sign up for Devpost to join the conversation.