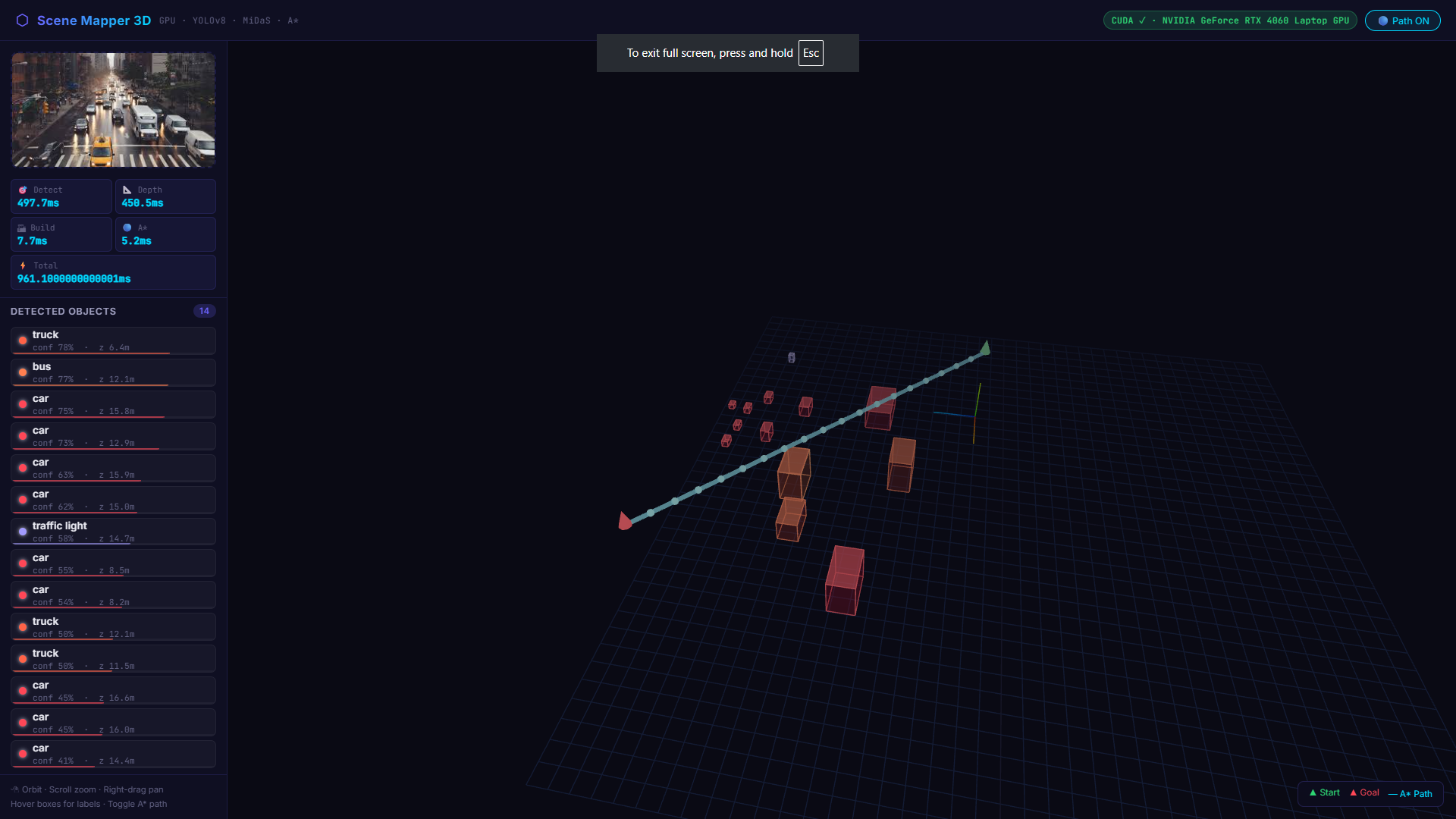
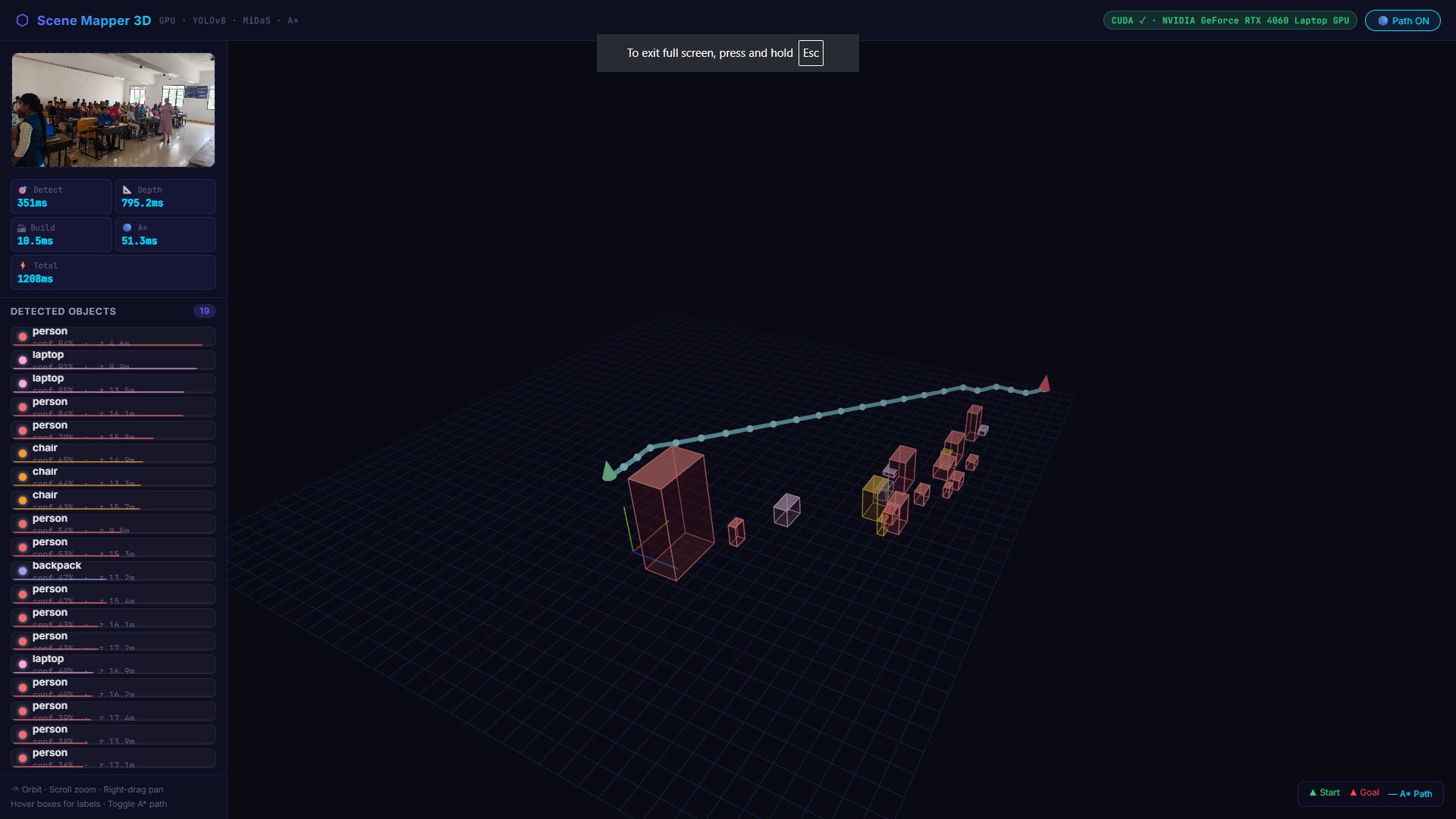
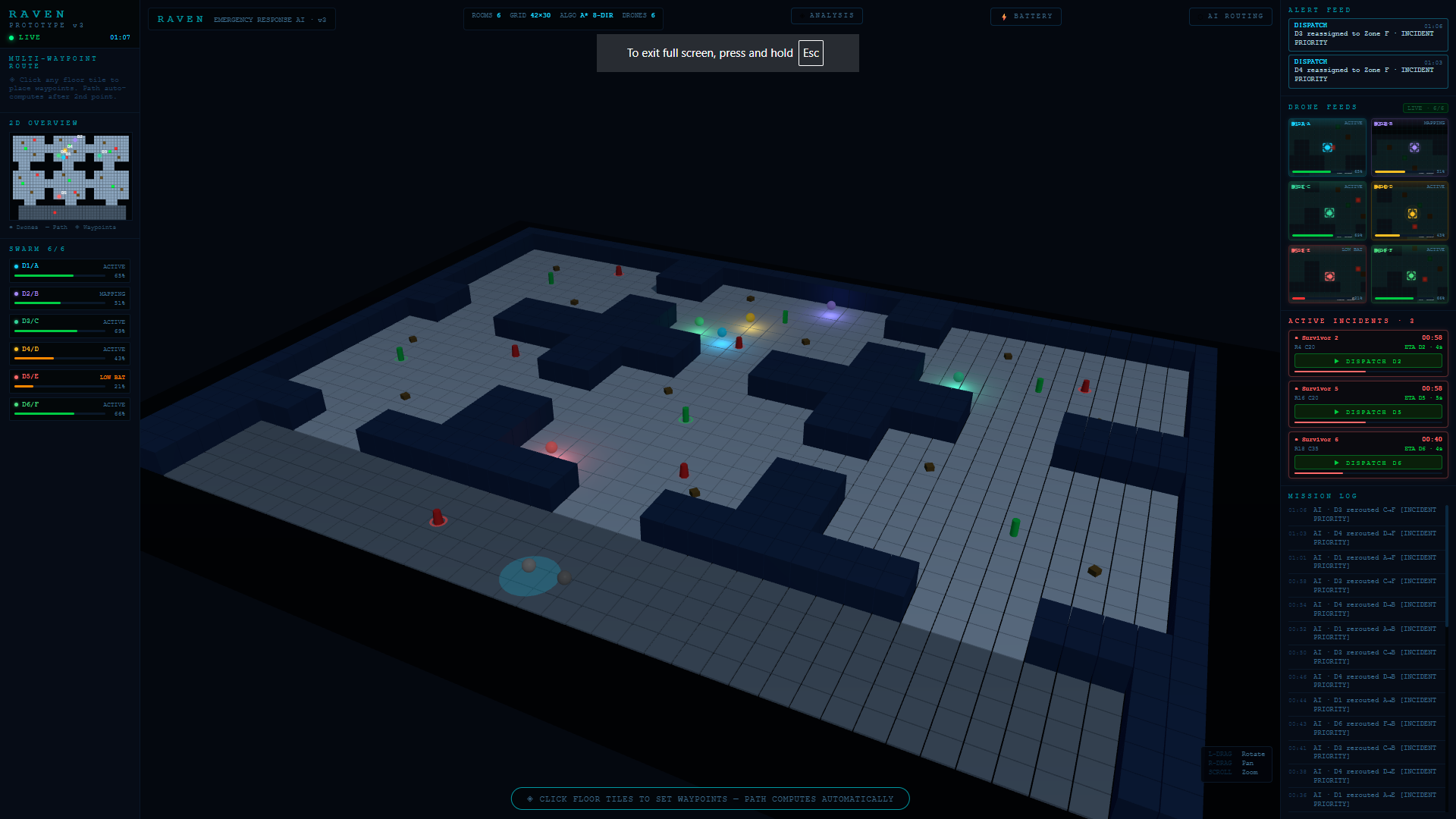
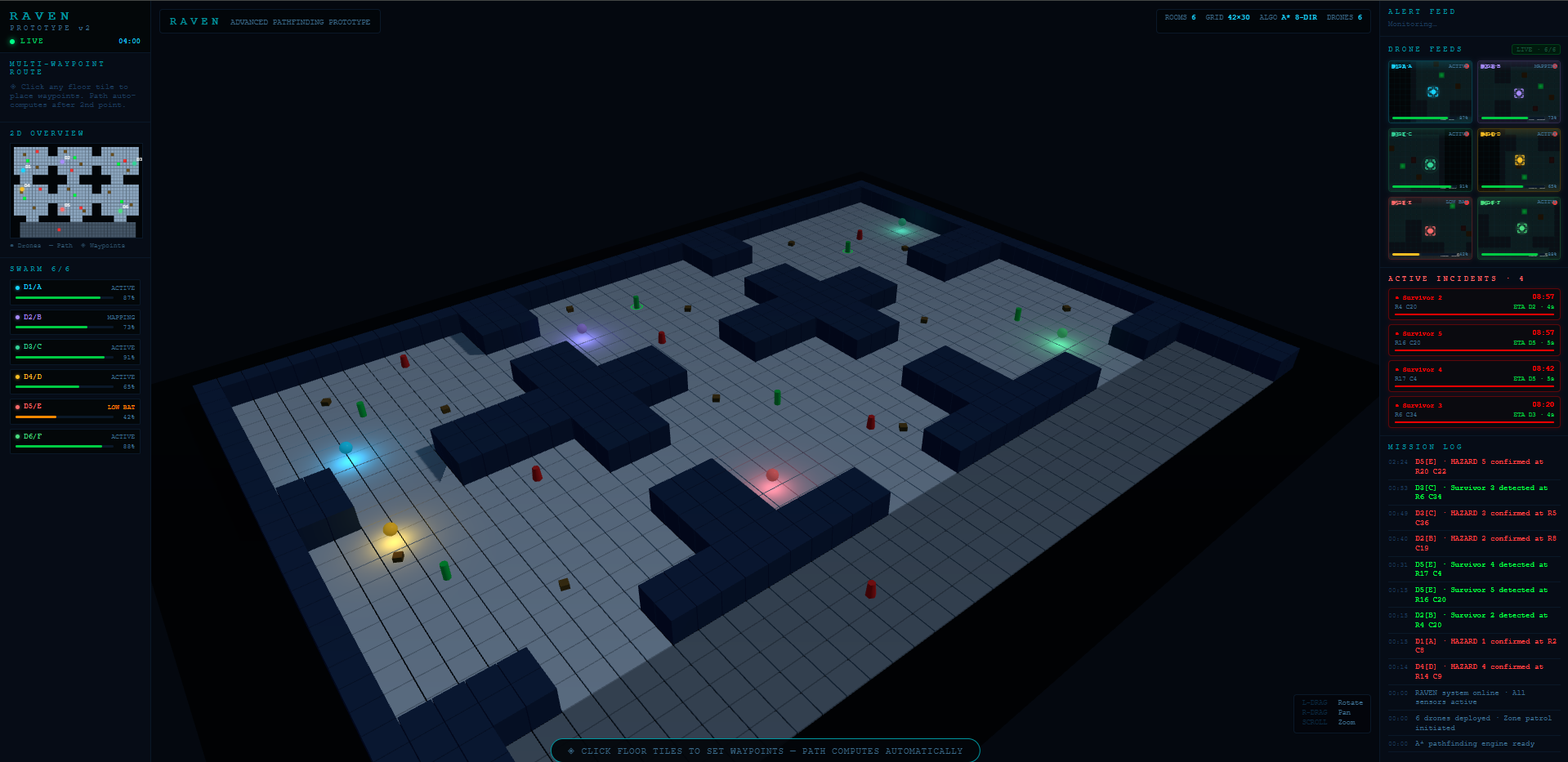

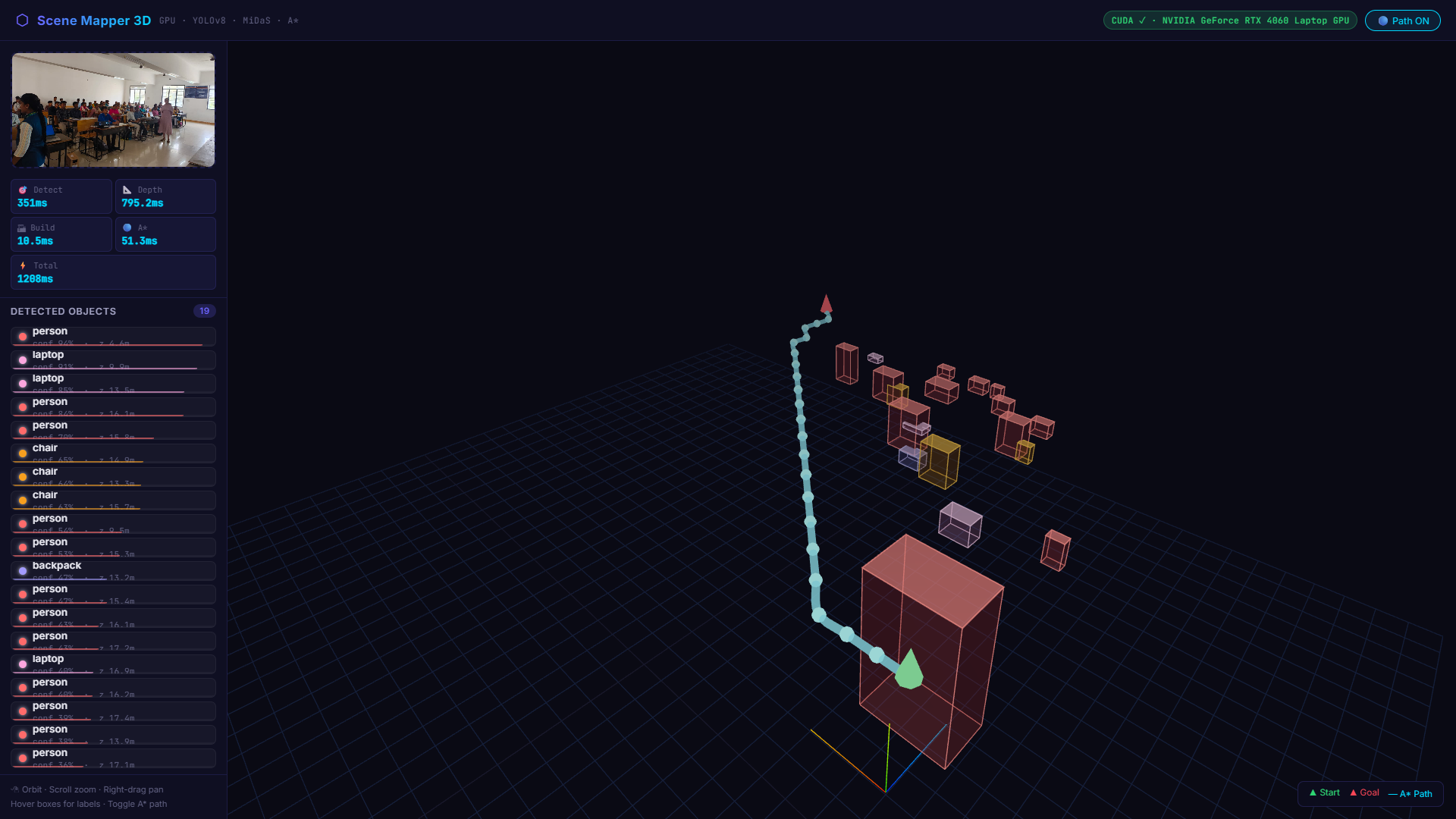
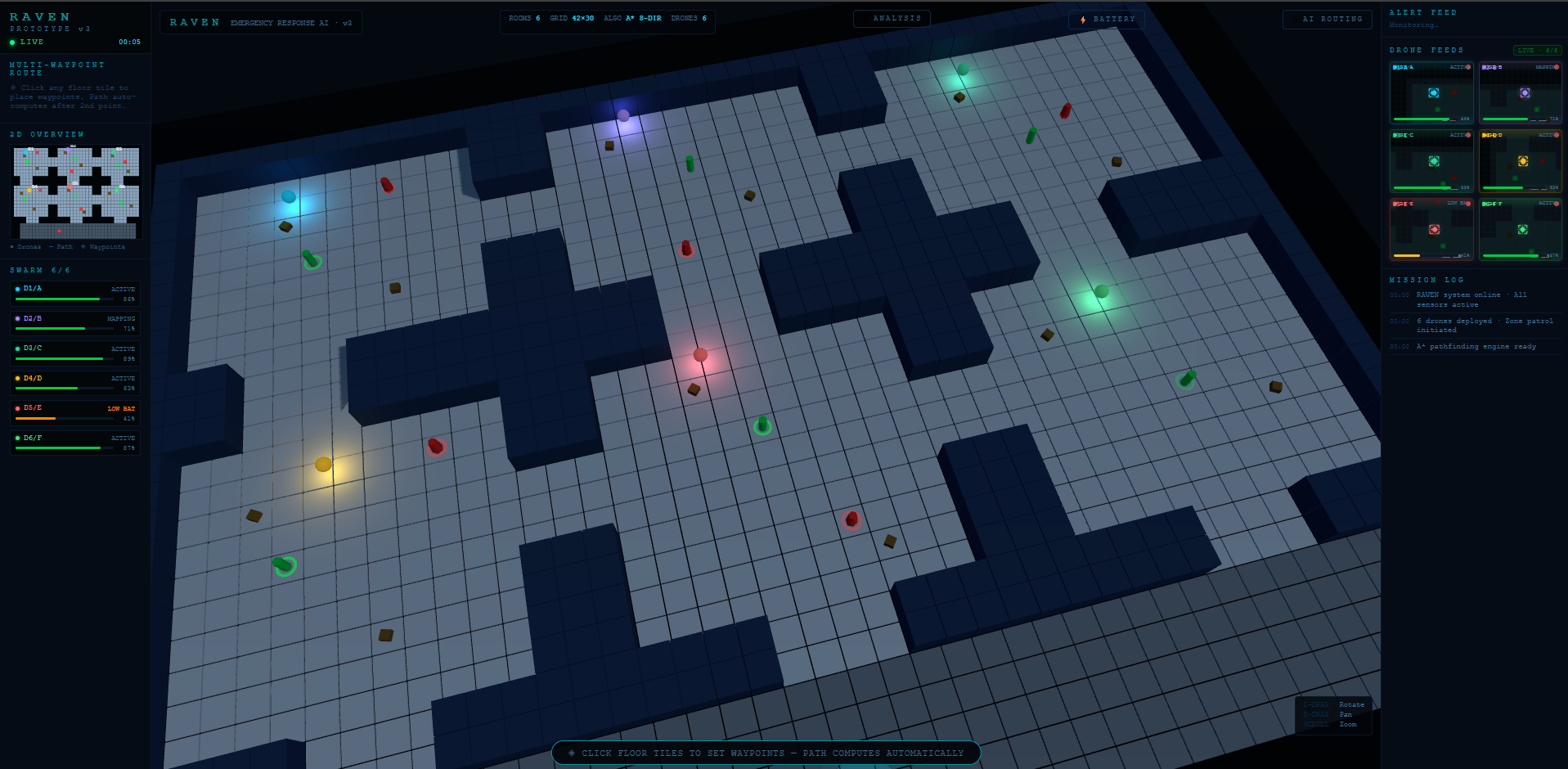
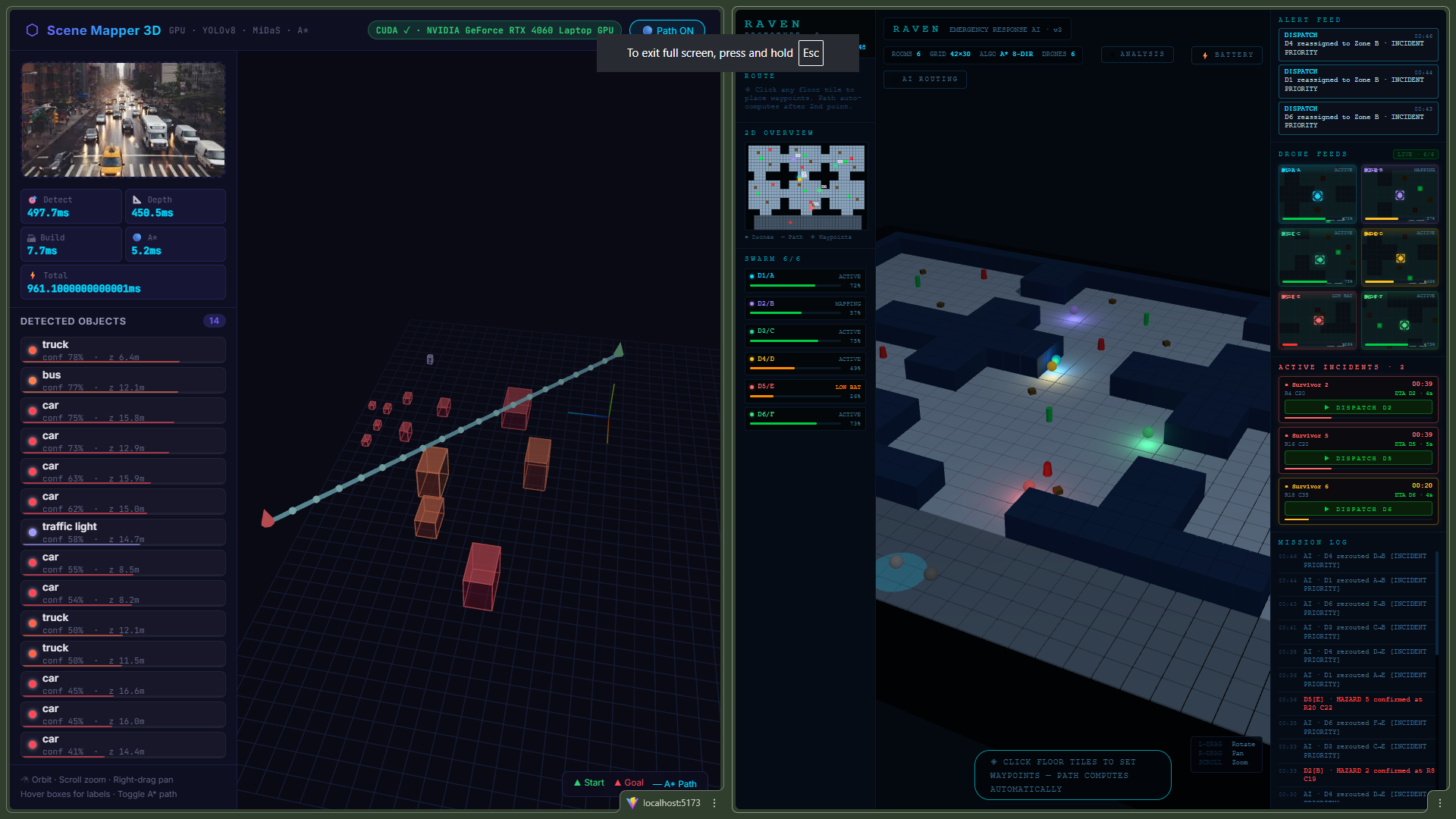
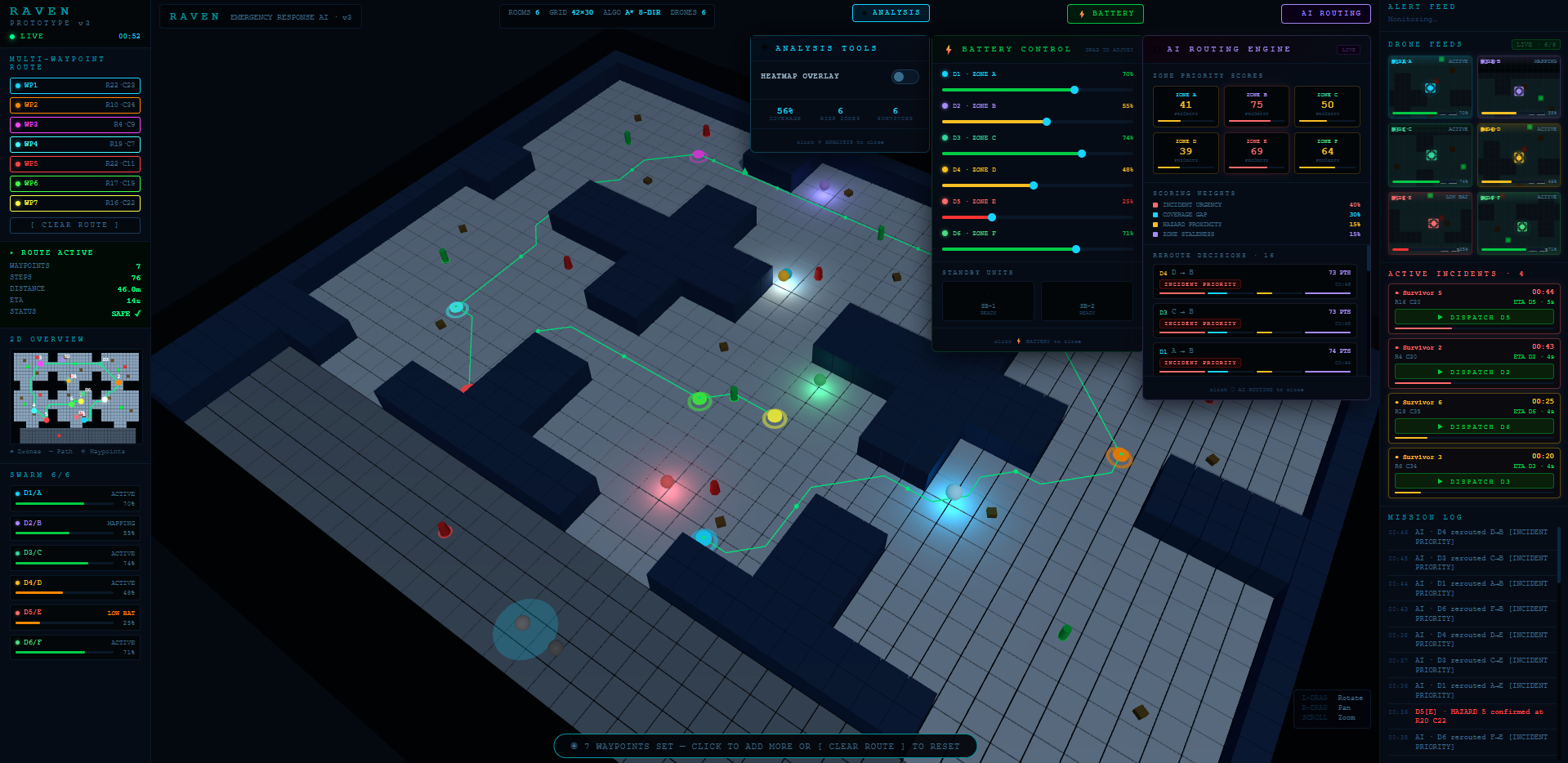
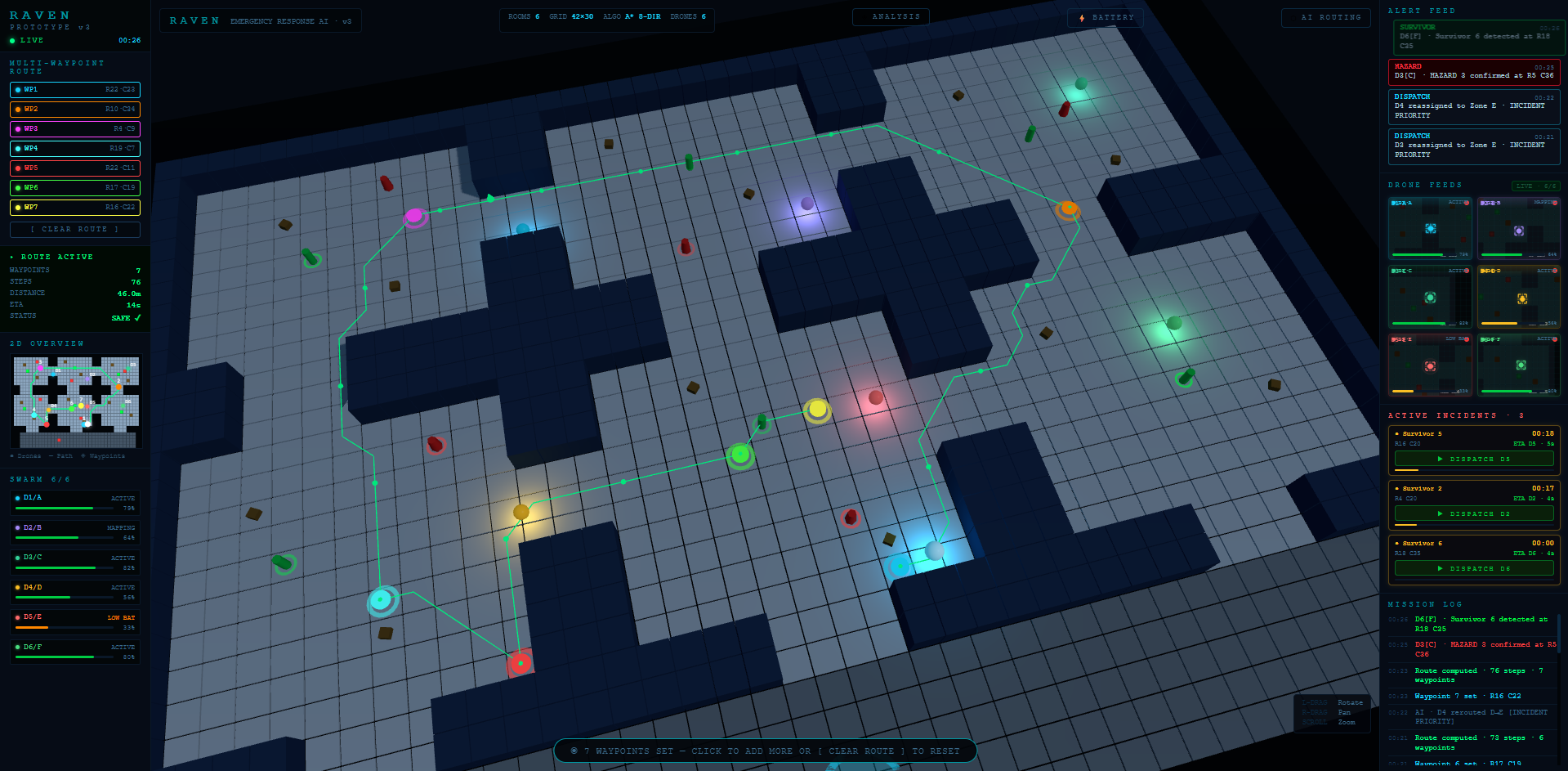
Inspiration Current emergency response systems often suffer from centralized delays and a total lack of real-time visibility at the incident scene. Ground teams frequently enter hazardous or unstable zones completely blind, which puts both victims and rescuers at extreme risk. The driving force behind this project is to eliminate those critical minutes of uncertainty and provide 3D intelligence before a human responder even steps foot into a danger zone. What it does RAVEN is an AI-coordinated drone swarm designed to automate search and rescue intelligence.Swarm Deployment: A heavy-lift Mother Drone carries and releases six micro-drones to perform autonomous, zone-based sweeps of a scene.3D Mapping: It uses LiDAR and SLAM fusion to build a live, GPS-independent digital twin of the environment updated every second.AI Detection: On-board YOLOv8 models process thermal and RGB feeds to autonomously tag survivors and identify hazards with real-time confidence scoring.Guided Response: The system generates A pathfinding routes* through safe corridors, which are reviewed and confirmed by incident commanders via a live dashboard
How we built it The project is built on a robust, multi-layered technical stack: Flight Control: Utilizes PX4/ArduPilot firmware and ROS 2 middleware for precise drone coordination. Hardware: The Mother Drone uses an NVIDIA Jetson AGX Orin, while micro-drones are equipped with NVIDIA Jetson Nano for edge AI processing. Intelligence Layer: Custom YOLOv8 models were optimized with TensorRT to achieve sub-50ms inference speeds for survivor detection. Frontend: A React-based dashboard uses WebGL for 3D map rendering and WebRTC for low-latency video streaming from all six drones.
Challenges we ran into GPS-Denied Navigation: Navigating through smoke and rubble required implementing LIO-SAM SLAM, which fuses LiDAR and IMU data to keep drift under 0.5 meters. Connectivity: Maintaining a stable link in debris-heavy environments led to the use of a 900 MHz mesh radio system with multi-hop V2V routing. Reliability: To mitigate the risk of missing survivors, we implemented a dual-model approach (thermal + RGB) to reduce false negatives. Coverage Gaps: We developed a failover protocol where an offline drone triggers a zone reassignment in under 5 seconds to ensure continuous map coverage
Accomplishments that we're proud of Simultaneous 3D Mapping: Achieving a live-fused 3D point cloud from six simultaneous LiDAR sources. Edge AI Performance: Successfully deploying autonomous survivor detection that operates at sub-50ms latency directly on the drones. Strategic Alignment: Ensuring the project directly contributes to UN Sustainable Development Goals, specifically focusing on Good Health, Industry Innovation, and Sustainable Cities.
What we learnedIntegration Complexity: We learned that integrating off-the-shelf components like LiDAR and ROS 2 into a cohesive swarm brain is the primary engineering challenge.Human-in-the-Loop Necessity: While AI can recommend actions, the Human-Confirmed Dispatch layer is vital for safety and structured emergency response.Regulatory Landscapes: Navigating the requirements for BVLOS (Beyond Visual Line of Sight) approval is as critical as the technical development for real-world deployment.
What's next for RAVEN Regulatory Certification: Completing the BVLOS certification application to allow for supervised pilot-first rollouts. Hardware Scaling: Expanding the modular design to support swarms of 12 or more drones depending on the incident scale. Enhanced Sensors: Incorporating specialized HAZMAT sensors for fire and gas detection to improve severity scoring for identified hazards

Log in or sign up for Devpost to join the conversation.