Inspiration: As Computer Science students, we are used to seeing our code run on a screen. This project inspired us because it allowed us to see our code create physical movement in the real world. The Winter Olympics theme motivated us to build a robot that combines movement, control, and precision, similar to how athletes rely on coordination and decision-making. We were excited to experience how programming logic could directly control hardware and create real actions.
What We Learned: This project taught us that robotics is a combination of programming, electronics, and mechanical design. We learned how the Arduino acts as the brain of the robot, how DC motors and a motor driver control movement, and how sensors help a robot understand its environment. The ultrasonic sensor measures distance, and the color sensor detects zones on the track. In particular, we implemented a color-based path detection system: the robot starts on a black line and, at the split, randomly chooses either the red or green path. If it accidentally goes onto the white zone at the side, it automatically corrects its course back to the path. We also learned how servo motors enable precise movements for an arm and claw. Using a breadboard to distribute power and share grounds helped us understand circuit organization.
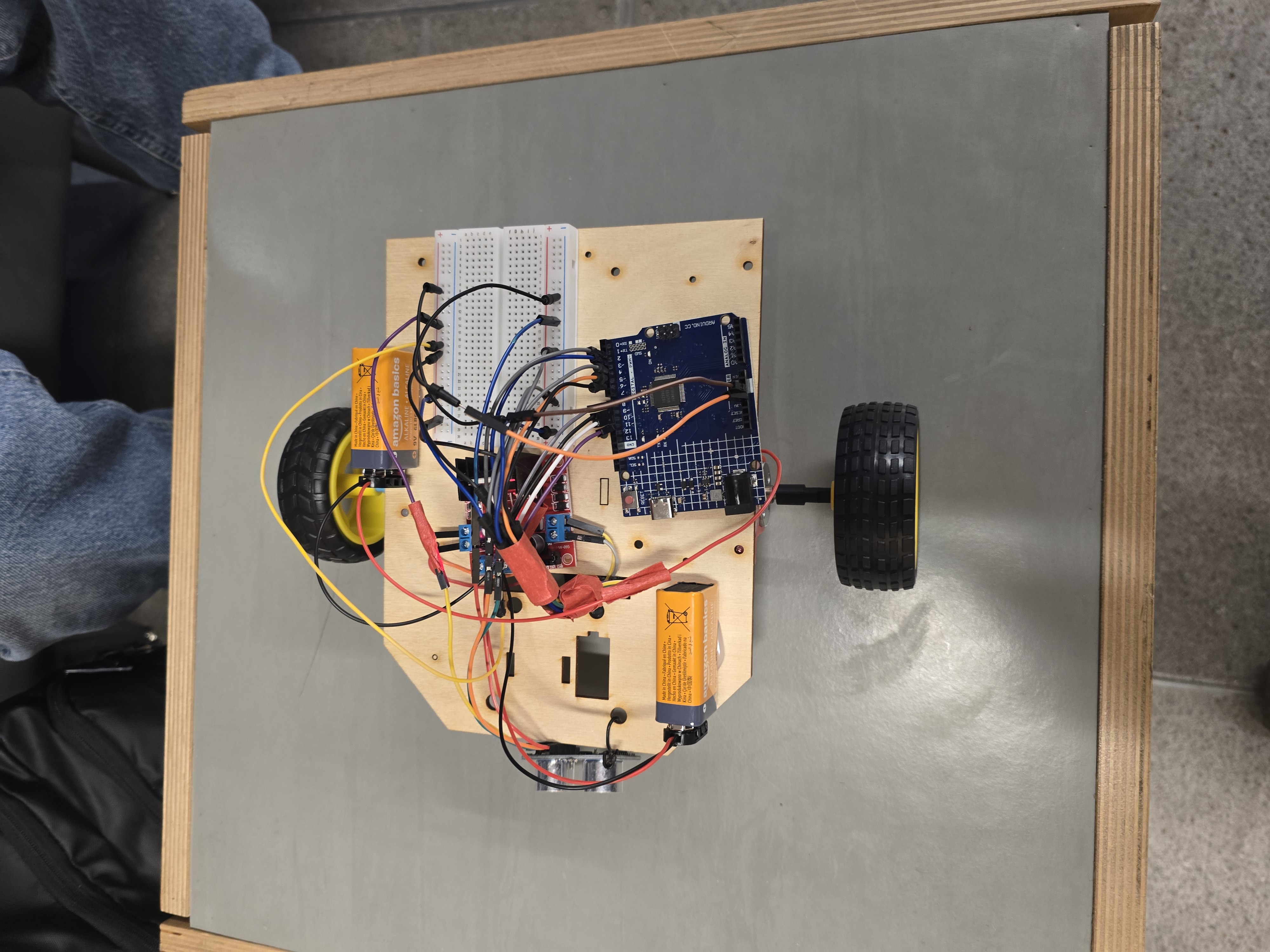
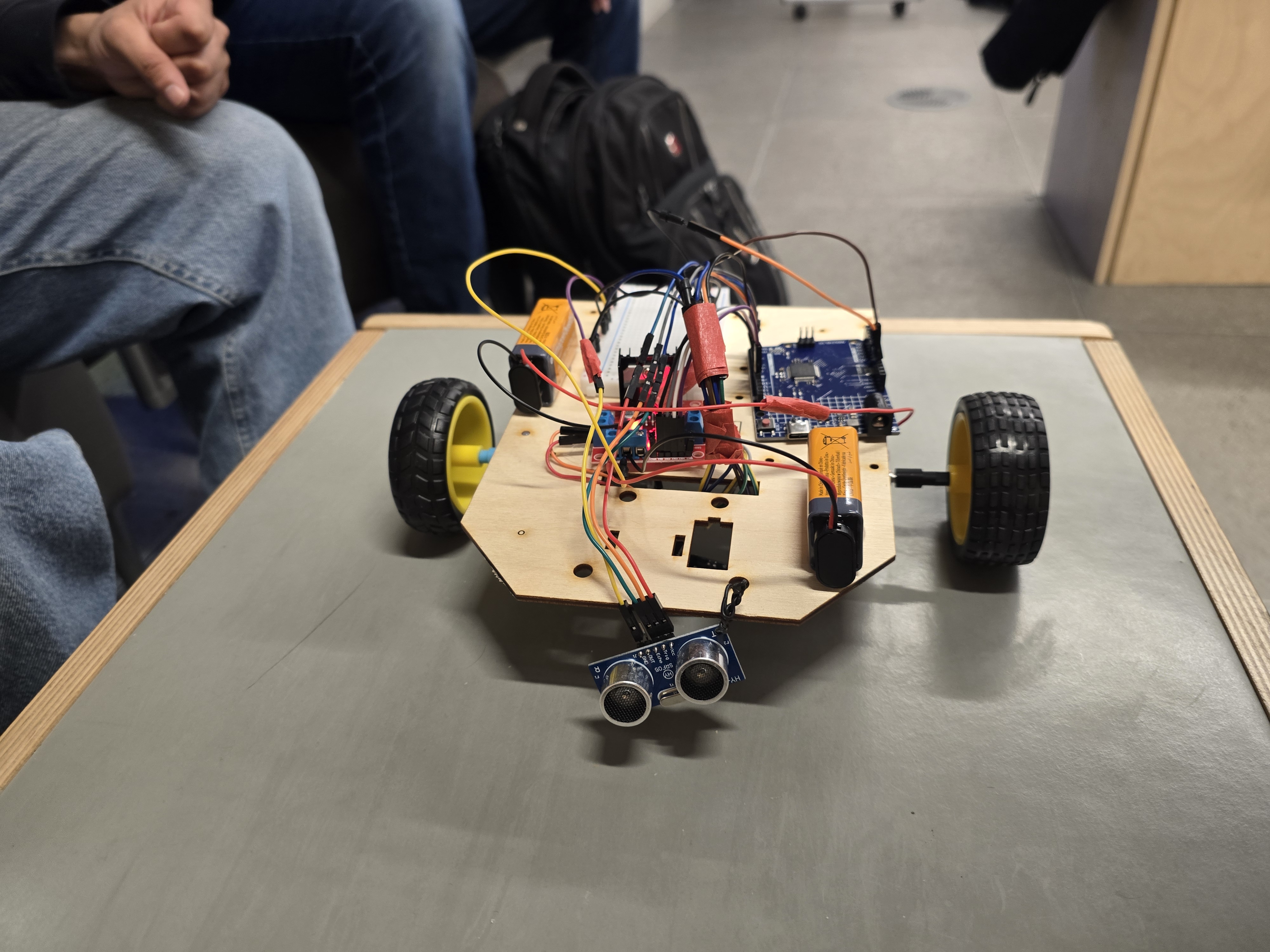
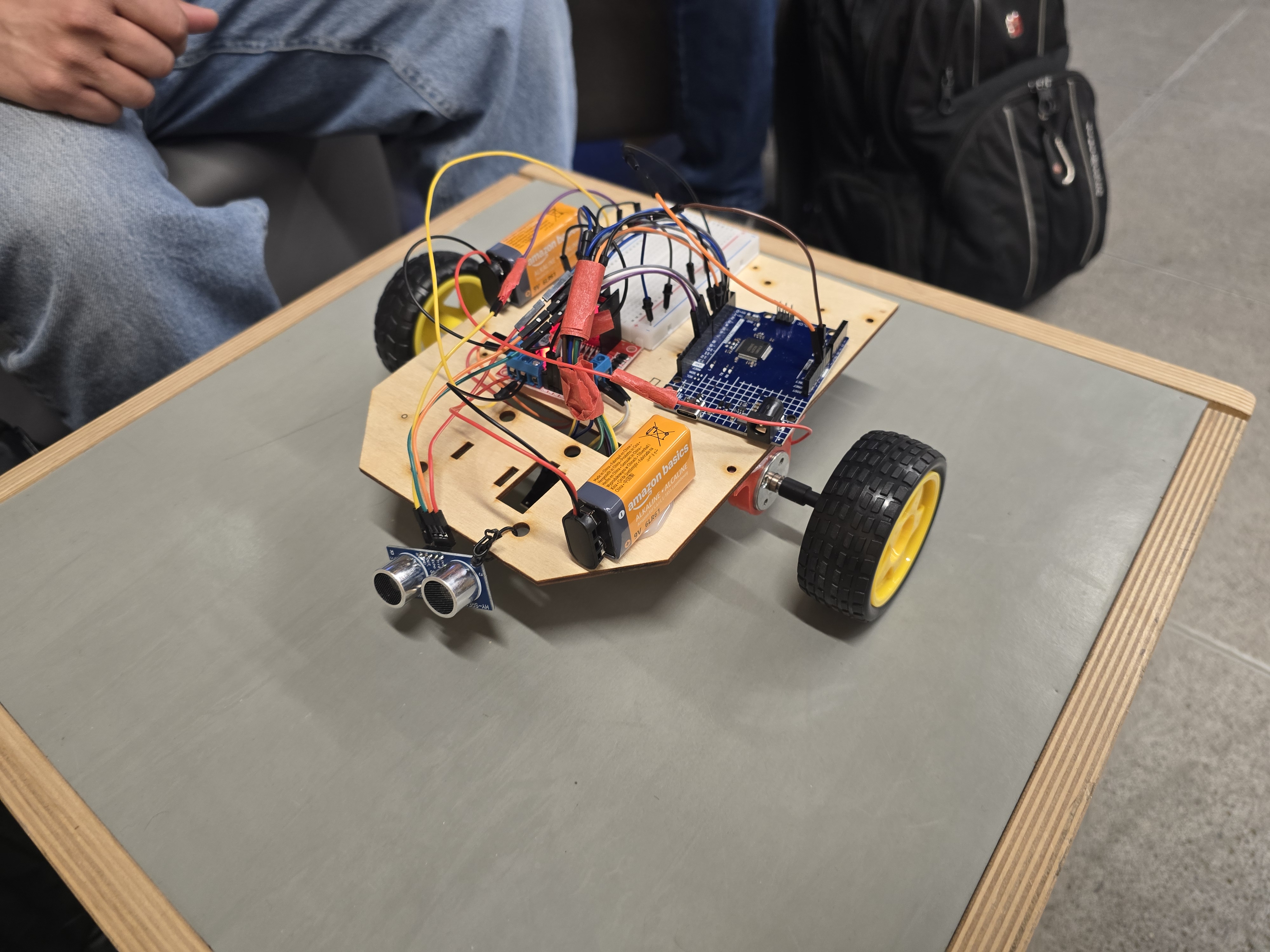
How We Built the Project: We built the robot on a laser-cut base using an Arduino Uno R4, an L298N motor driver, two DC motors with wheels, an ultrasonic sensor, a color sensor, and two micro servos. The Arduino continuously reads sensor data and decides how the robot should move. If the path is clear, the robot moves forward. If an obstacle is detected, it turns. The color sensor allows the robot to follow the correct path: it identifies red or green at the split and chooses a path randomly while using white detection to prevent veering off course.
Challenges We Faced: We faced several practical challenges while building the robot. Connecting all the components correctly was difficult, and loose wires sometimes caused parts to stop working. We also ran out of ground pins on the Arduino and learned how to use the breadboard as a shared ground system. Another challenge was implementing the color-based path logic, ensuring the robot could follow the line reliably while avoiding white zones and handling obstacles. Debugging both hardware and software at the same time was tricky since problems could come from wiring, power, or code. These challenges improved our teamwork, patience, and problem-solving skills.
Reflection: This project showed us how exciting it is to turn computer science knowledge into real-world robotics. Seeing the robot move because of our code was very rewarding. With the addition of color path detection, we experienced how a combination of sensors, logic, and actuation allows a robot to make autonomous decisions. We gained hands-on experience with sensors, motors, circuits, programming, and collaboration, which helped us better understand how software controls physical systems.


Log in or sign up for Devpost to join the conversation.