-

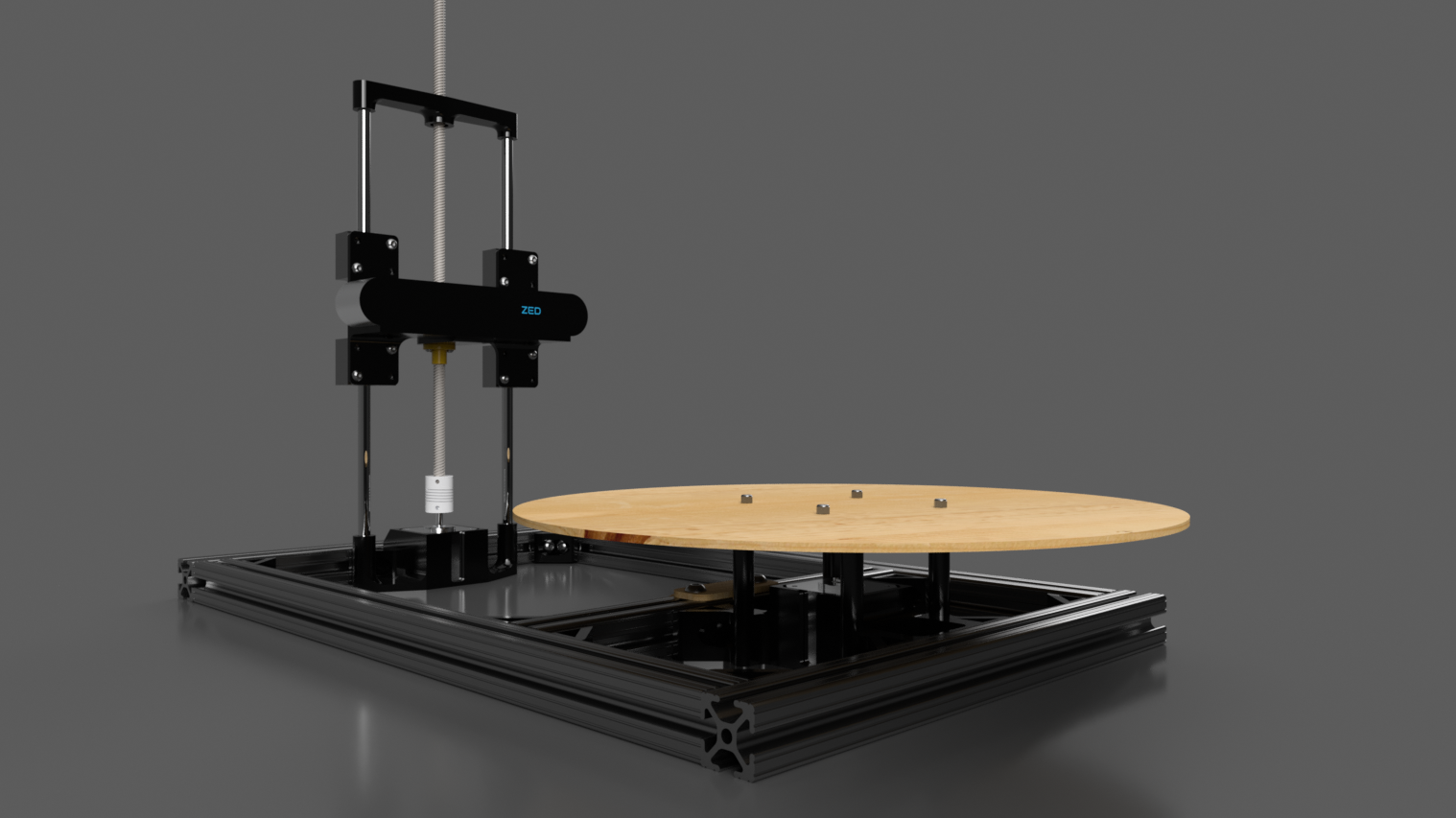
Fusion 360 render 2
-

Fusion 360 render 3
-

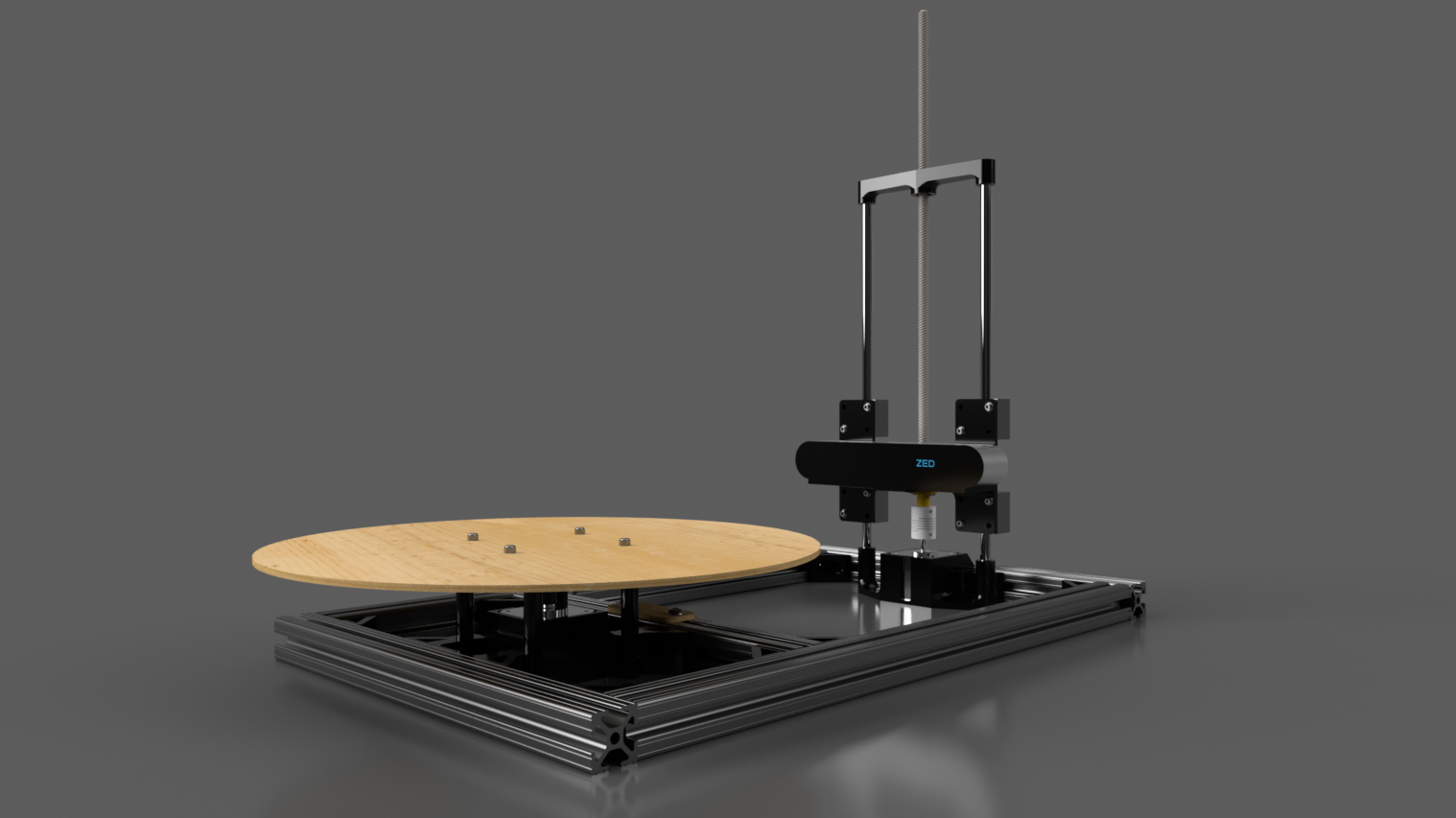
Fusion 360 render 1
-

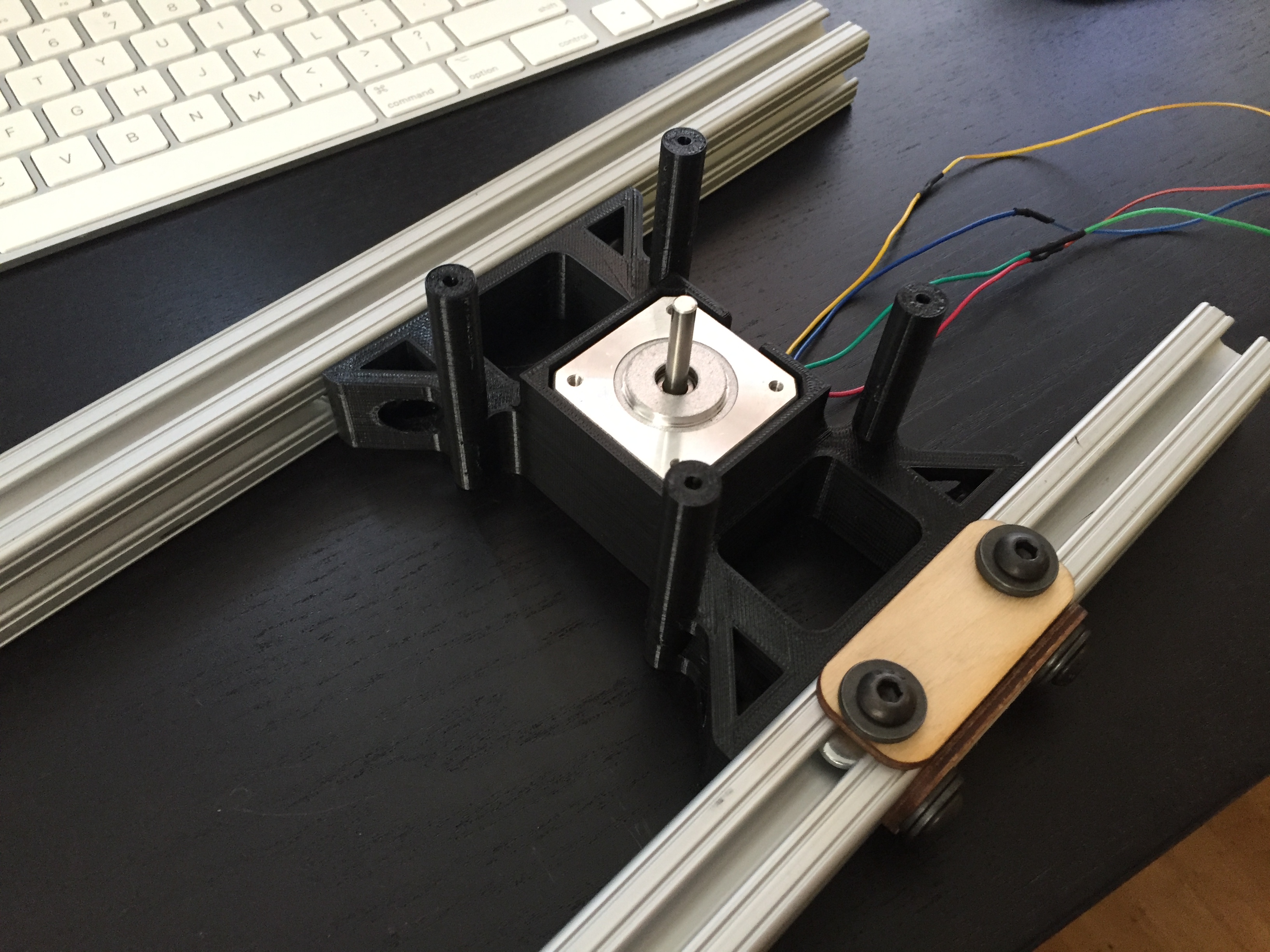
Fusion 360 render 4
-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-



















Inspiration
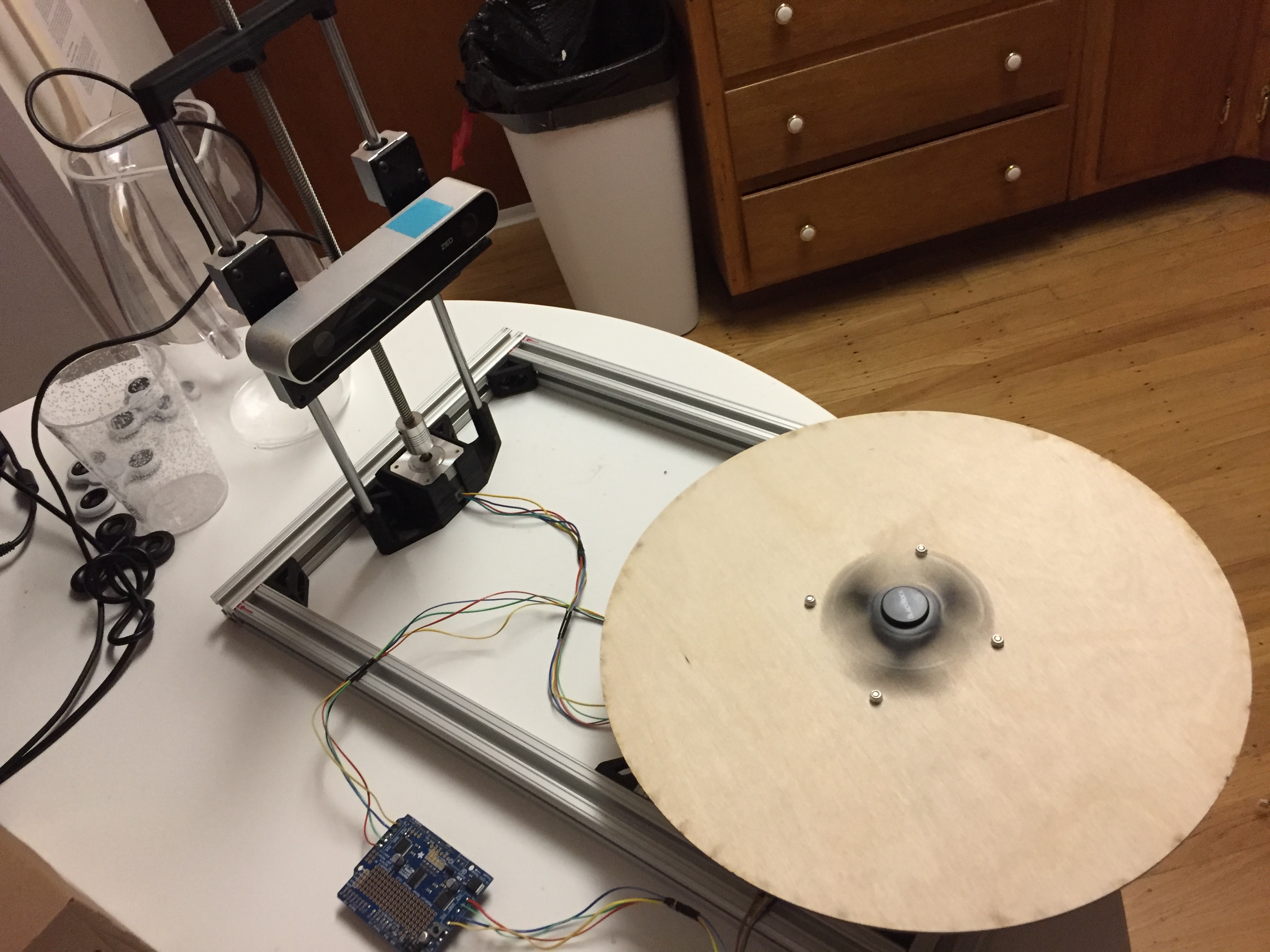
3D Printing offers quick and easy access to a physical design from a digitized mesh file. Transferring a physical model back into a digitized mesh is much less successful or accessible in a desktop platform. We sought to create our own desktop 3D scanner that could generate high fidelity, colored and textured meshes for 3D printing or including models in computer graphics. The build is named after our good friend Greg who let us borrow his stereocamera for the weekend, enabling this project.
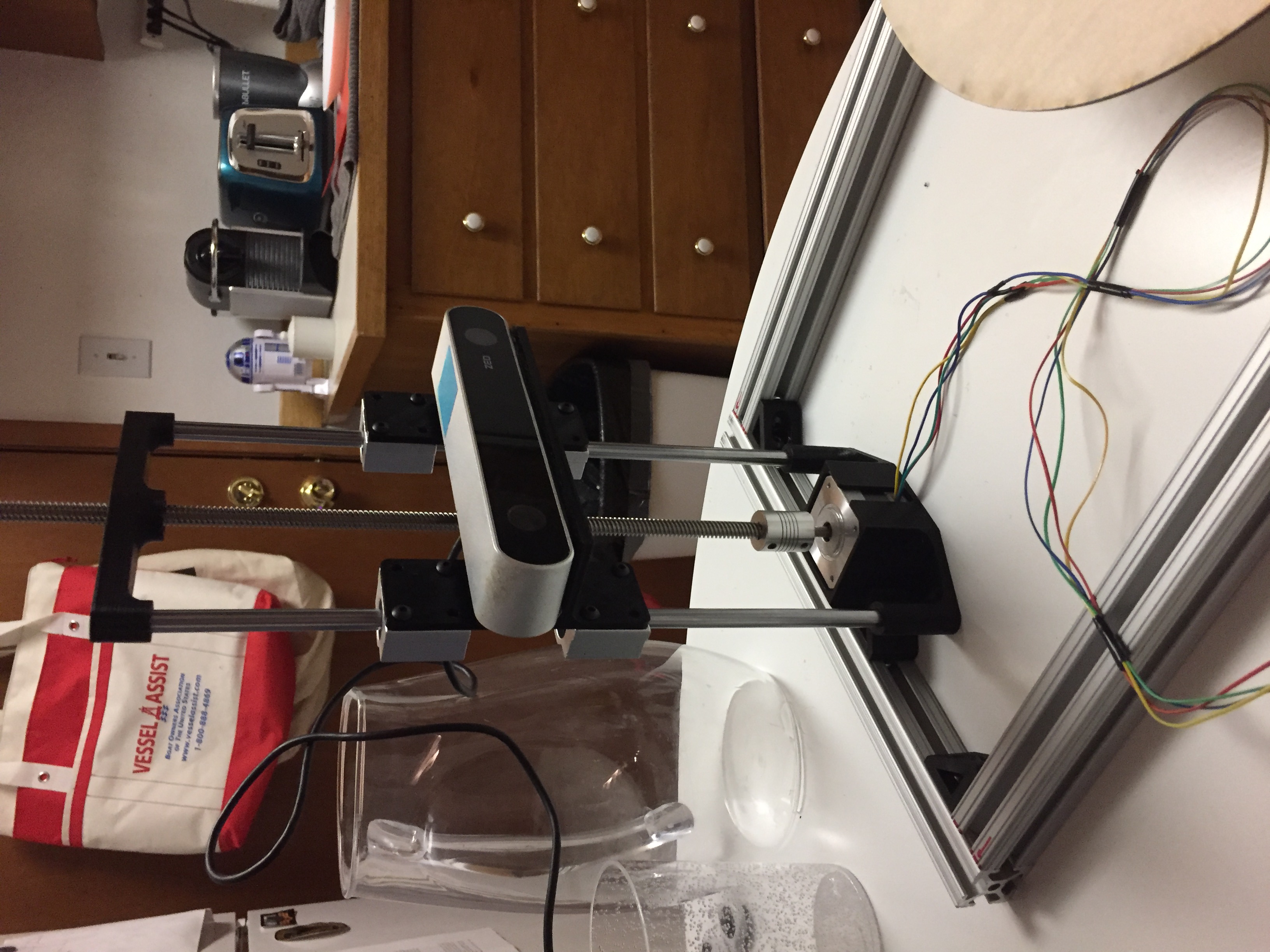
How we built it
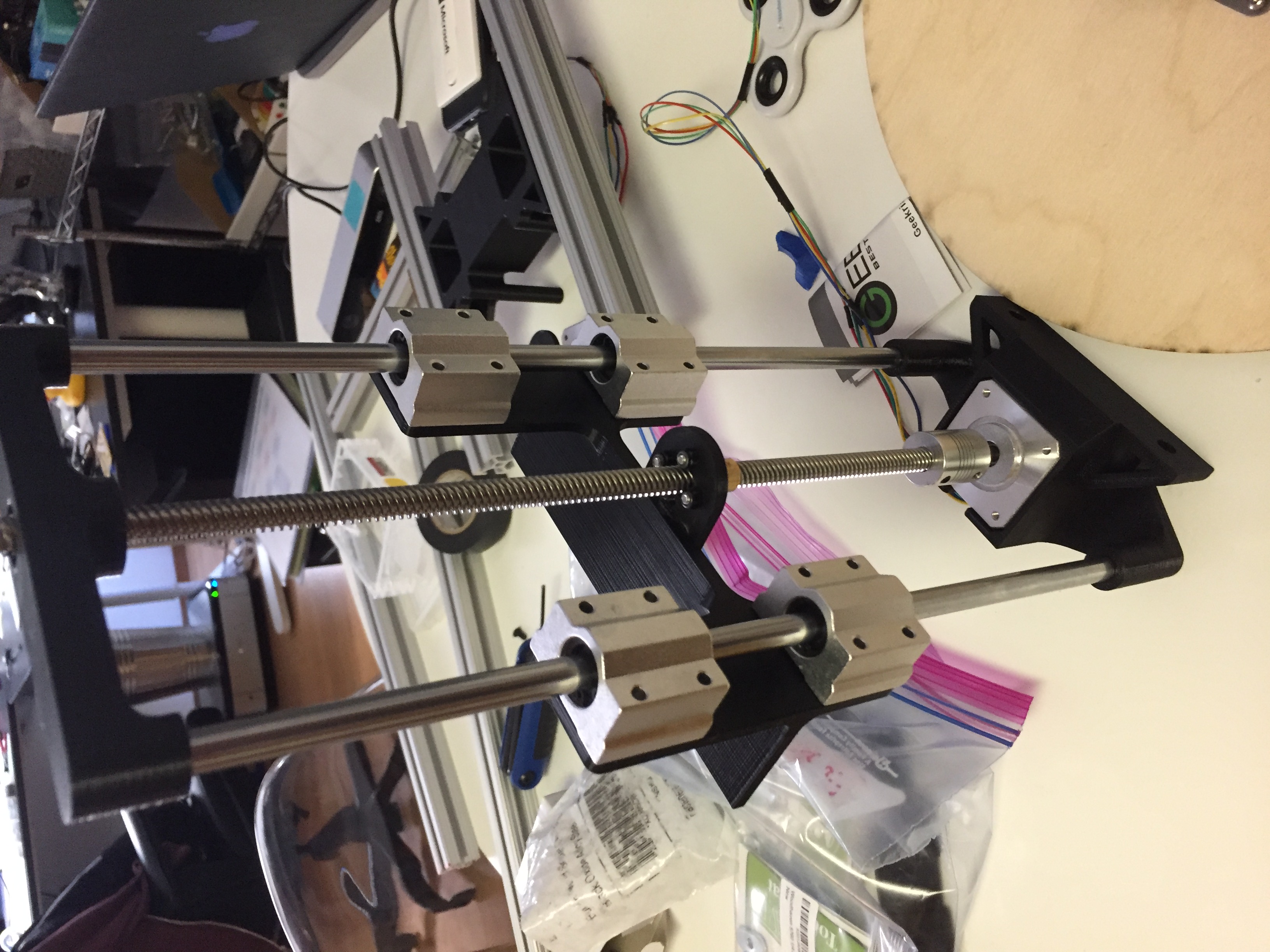
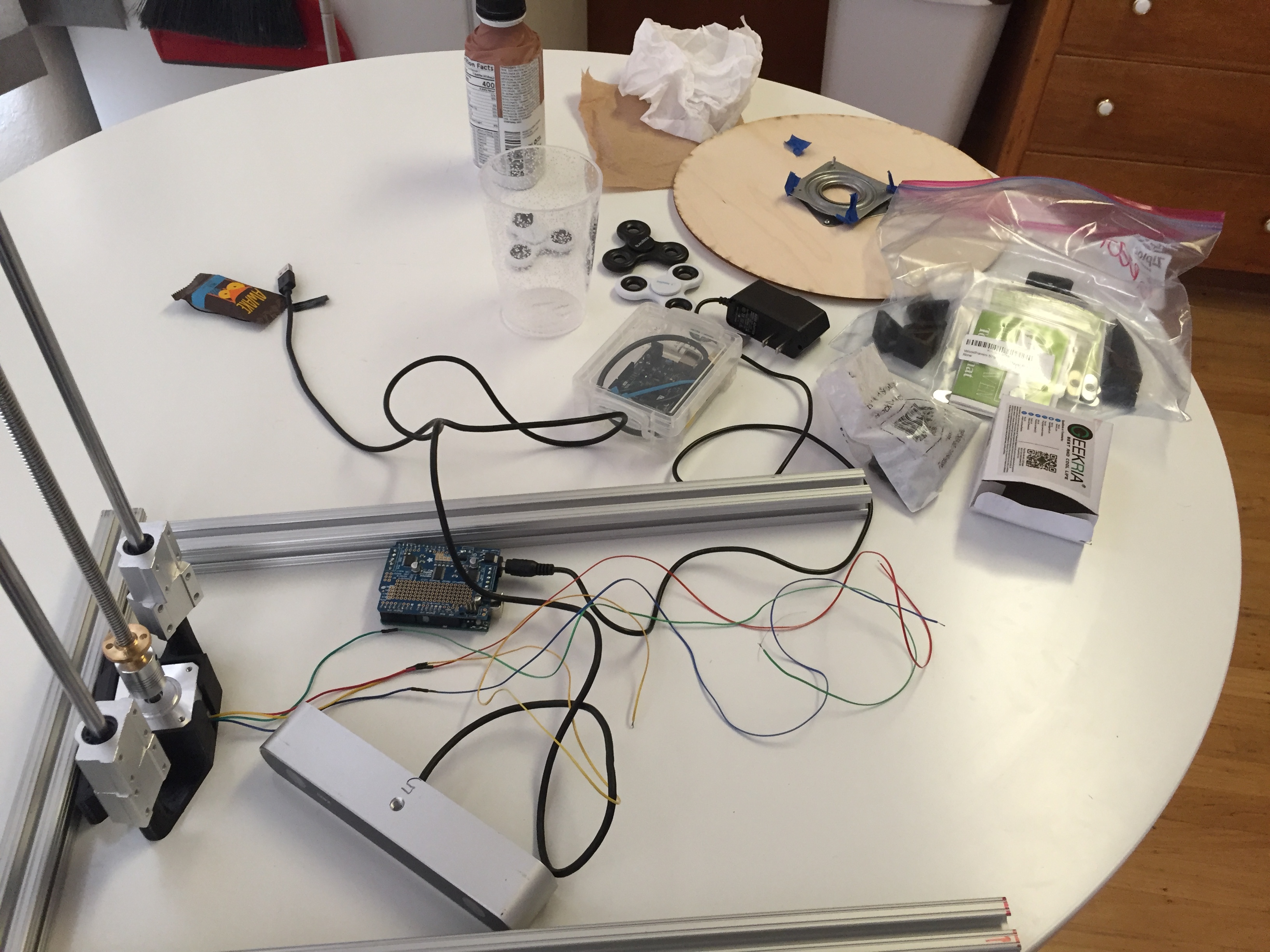
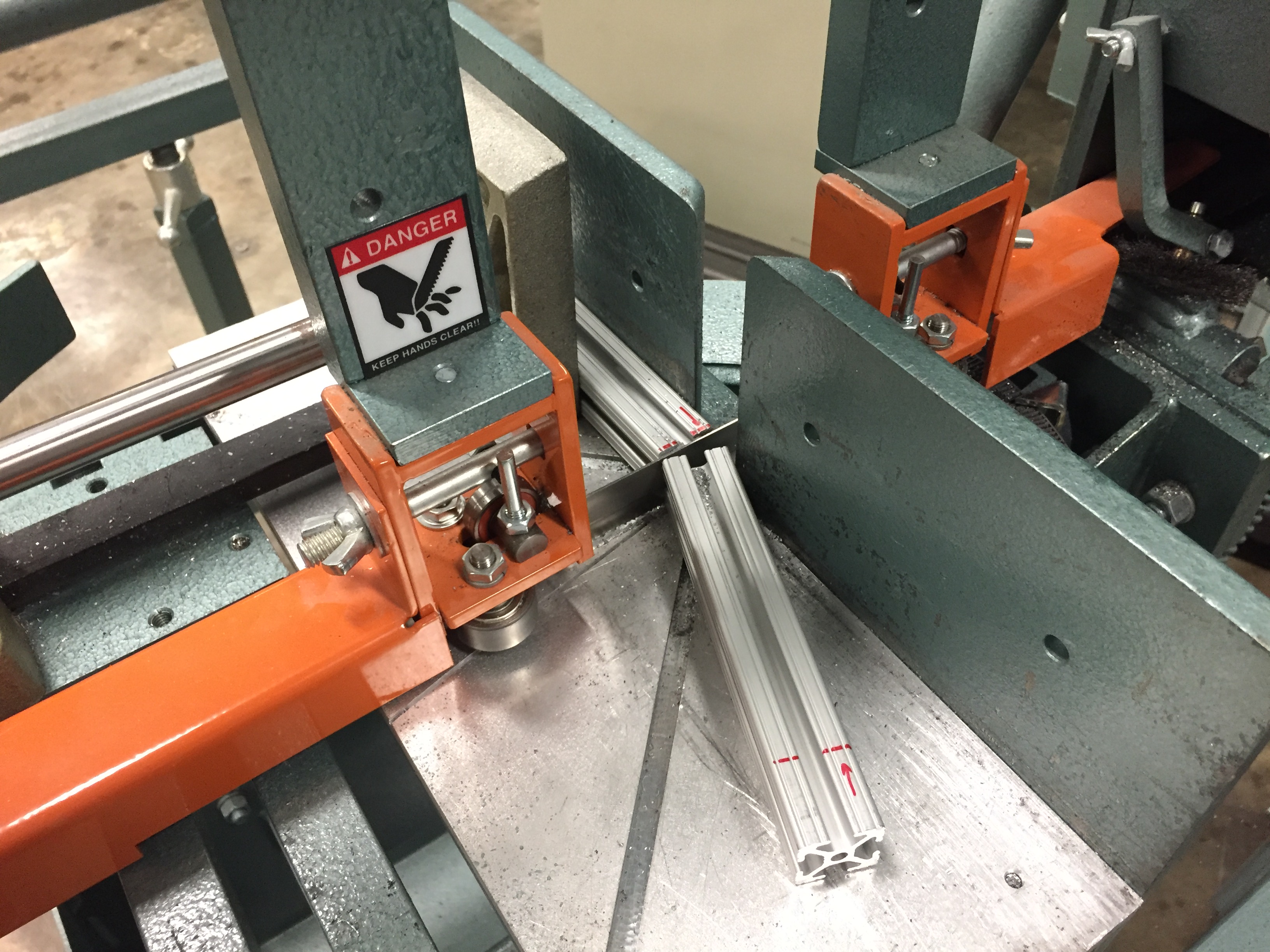
The rig uses a ZED stereocamera driven by a ROS wrapper to take stereo images at various known poses in a spiral which is executed with precision by two stepper motors driving a leadscrew elevator and a turn table for the model to be scanned. We designed the entire build in a high detail CAD using Autodesk Fusion 360, 3D printed L-brackets and mounting hardware to secure the stepper motors to the T-slot aluminum frame we cut at the metal shop at Jacobs Hall. There are also 1/8th wood pieces that were laser cut at Jacobs, including the turn table itself. We designed the power system around an Arduino microcontroller and and an Adafruit motor shield to drive the steppers. The Arduino and the ZED camera are controlled by python over a serial port and a ROS wrapper respectively to automate the process of capturing the images used as an input to OpenMVG/MVS to compute dense point clouds and eventually refined meshes.
Challenges we ran into
We ran into a few minor mechanical design issues that were unforeseen in the CAD, luckily we had access to a 3D printer throughout the entire weekend and were able to iterate quickly on the tolerancing of some problematic parts. Issues with the AccelStepper library for Arduino used to simultaneously control the velocity and acceleration of 2 stepper motors slowed us down early Sunday evening and we had to extensively read the online documentation to accomplish the control tasks we needed to. Lastly, the complex 3D geometry of our rig (specifically rotation and transformation matrices of the cameras in our defined world coordinate frame) slowed us down and we believe is still problematic as the hackathon comes to a close.
Accomplishments that we're proud of
We're proud of the mechanical design and fabrication, actuator precision, and data collection automation we achieved in just 36 hours. The outputted point clouds and meshes are still be improved.
Built With
- 3dprinting
- arduino
- autodesk-fusion-360
- cuda
- openmvg
- openmvs
- python
- ros
- zed




Log in or sign up for Devpost to join the conversation.