-
-
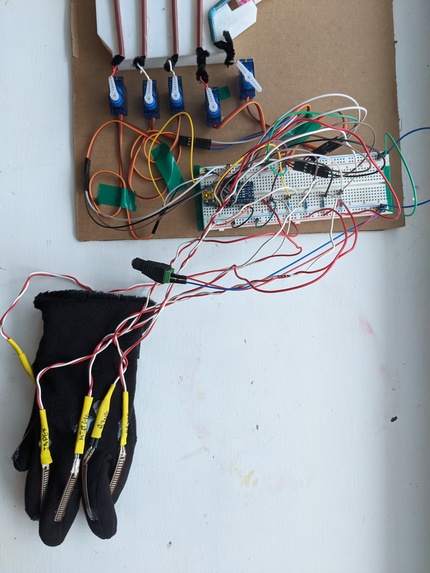
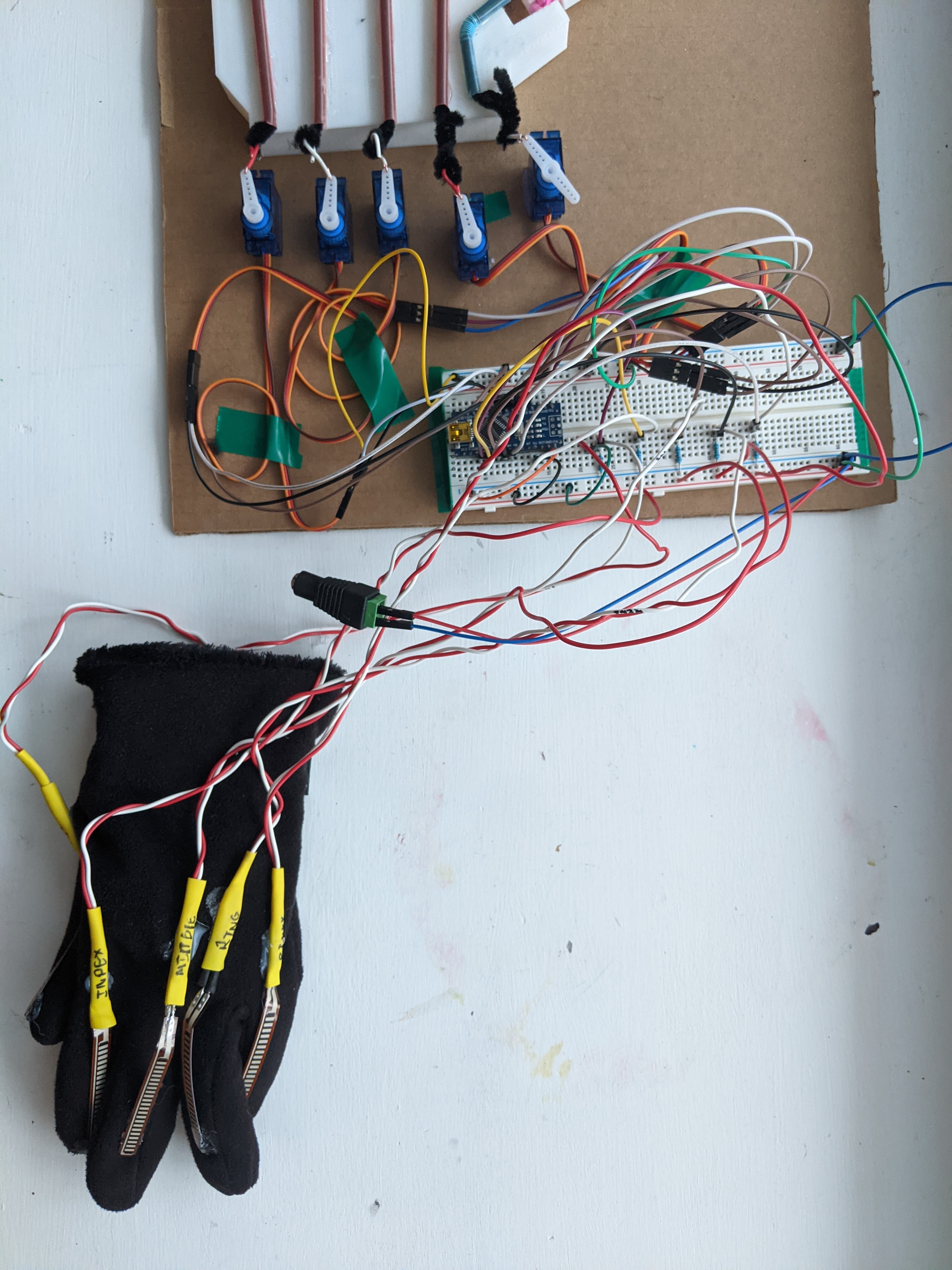
Glove used to capture hand position through flex sensors.
-
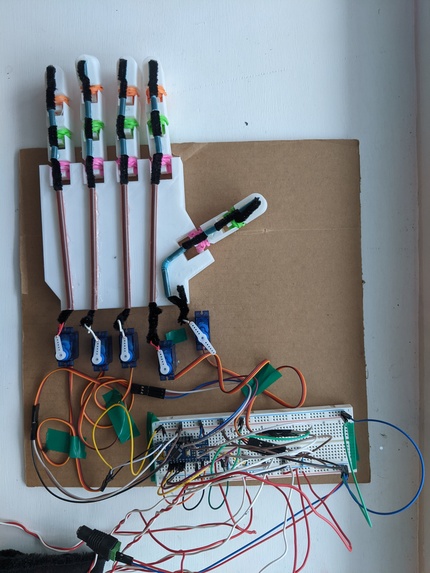
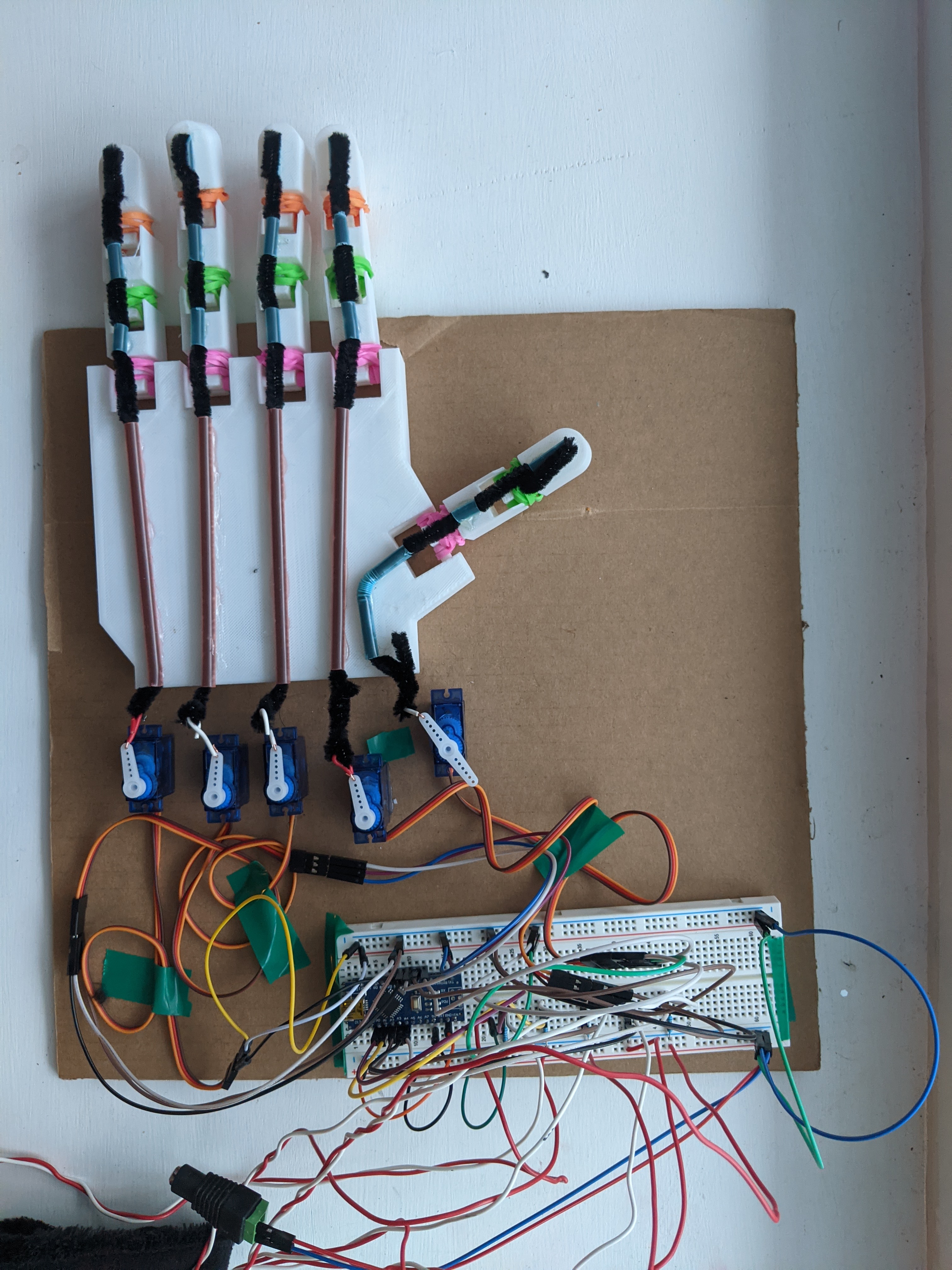
3D printed hand on which the captured hand positioning is modeled in real time.
-
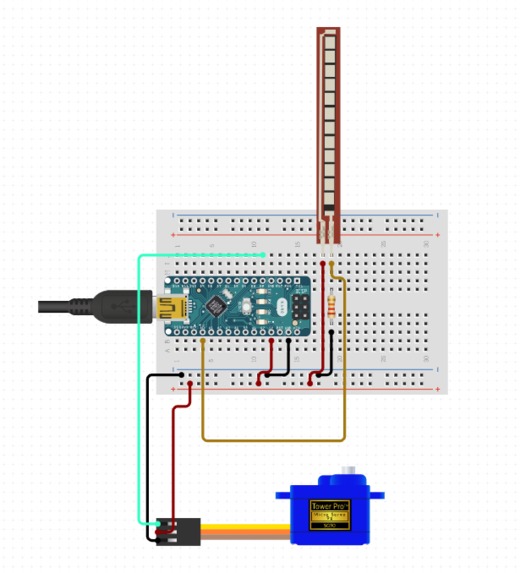
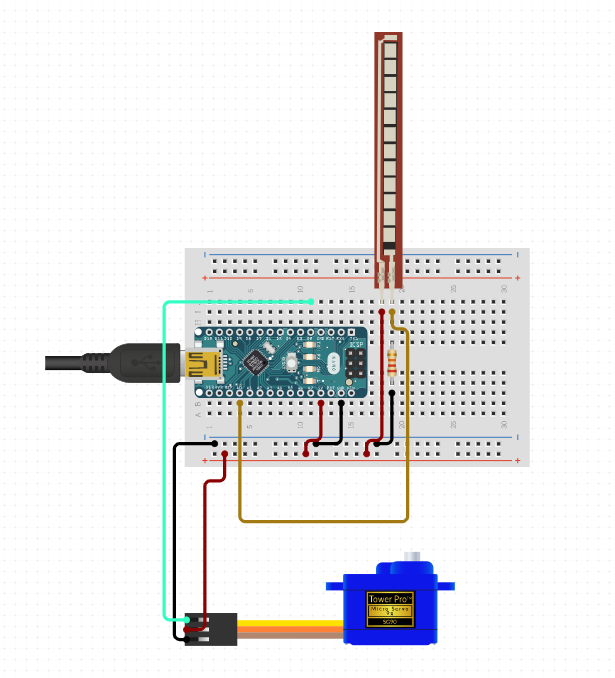
Sample circuit for one of the five finger in the glove. Voltage division is used to find the flex sensors position.
Inspiration
Both of us have an interest in the mechatronics field and thought it would be fun to do something together over the reading week. The idea for the hand came about as we thought it would be a good challenge for us to try and work through while still being attainable.
What it does
The project is in 2 main parts. One part is a glove that is worn with flex sensors attached along the fingers. The Arduino Nano's analog pins read the change in voltage as the flex sensor bends and determines where the finger is at. The second part, a 3D printed hand controlled by 5 servos then takes over. The servos pull each 3D printed finger individually to mimic the motion of the gloved hand in real time.
How we built it
Each of us played to our strengths. The Mechanical engineering student worked on designing the hand in Solidworks while the ECE student worked on the circuitry that would control the set up. Once the 3D model of the hand was modeled it was printed out and assembled along with the rest of the parts.
Challenges we ran into
Turning the idea of a hand into an actual working model was harder than expected. Who knew the hand had so many joints. Additionally, printing bendy things is not a strong suit of 3D printers and getting the hand to go and then stay together was a struggle. We were able to get it to work however but would change the design if we would do it again.
Accomplishments that we're proud of
We are simply proud that we are able to demo the project. Neither of us has a ton of experience and it was just nice to go through a project in a couple of days and get it done. A great experience and one we hope to use in the future.
What we learned
We learned a couple of key things.
- We learned that describing some things virtually is extremely hard even with video chats available.
- We learned how to better design 3D models to move smoothly when printed in plastic ## What's next for Grab Hand If this project were to get redone it would need a couple things.
- It would need a new model of the hand to better model the real motion of a human hand.
- Possibly improve the measurement technology from flex sensors, while they work they have low precision and are hard to easily mount to the hand. (possibly use hall sensors??)
- The glove is currently quite cumbersome with all of the wires attached. Adding a second arduino to the glove and making the whole thing wireless would add to ease of use and improve the design.
Built With
- 3dprinting
- arduino
- solidworks

Log in or sign up for Devpost to join the conversation.