-
-
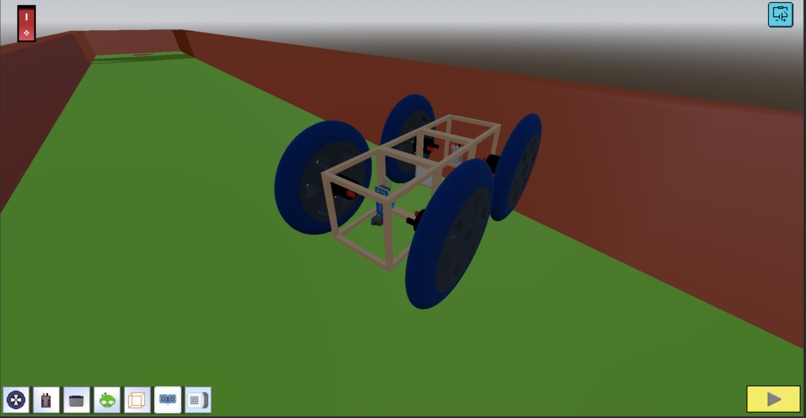
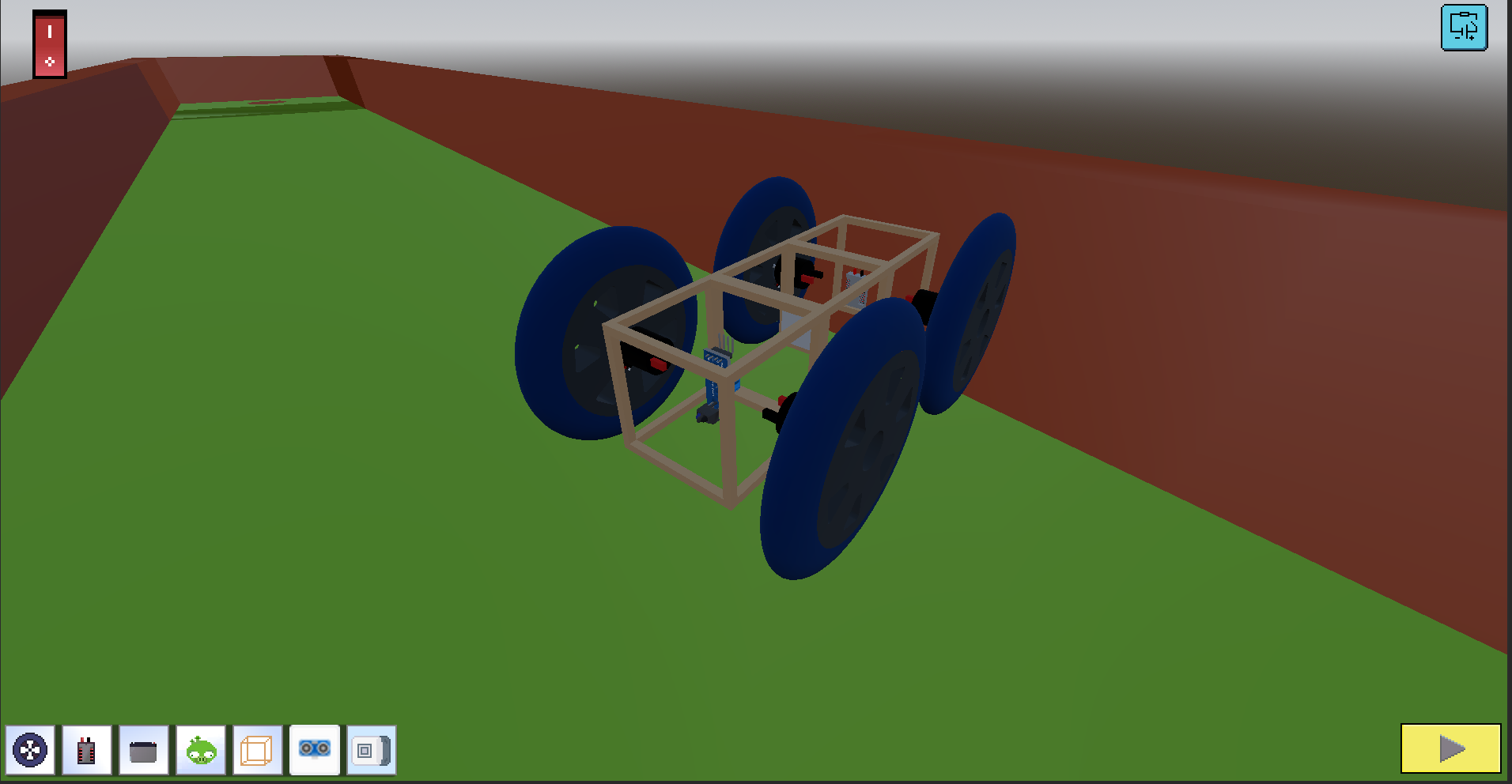
Vehículo creado en el simulador
-
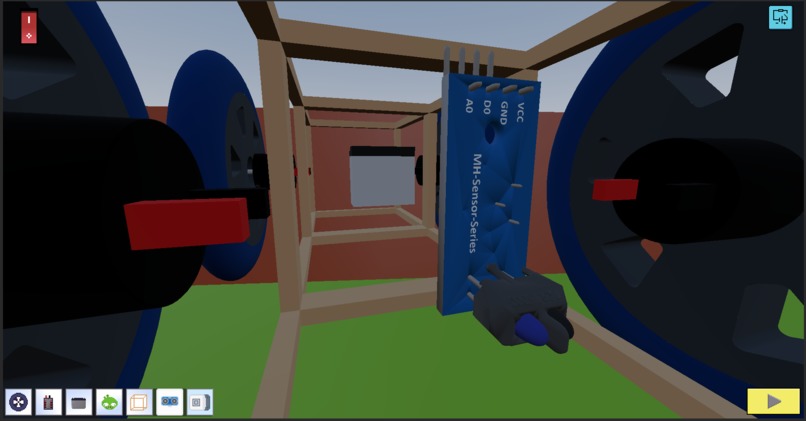
Sensores y conexiones hechas dentro del vehiculo.

Inspiración
Nuestra inspiración principal viene de los juegos de simulación sandbox, donde el mayor atractivo era crear vehiculos chuscos y ver como batallan para existir dentro del ambiente del juego, como Bad piggies y Kerbal Space Program. Para que cualifique como robot, le añadimos sensores.
Lo que hace
Permite al usuario crear un robot y configurar sus componentes, para que este se intente mover libremente dentro de un escenario. Es una interfaz de construcción y simulación de robots con sistemas de sensores modular e interactivo.
Como lo construimos
Utilizamos Onshape para crear modelos representantes de los bloques, componentes, y sensores que creímos relevantes a un robot (así como renders de libre acceso en internet), y Godot Engine para programar la simulación física y su escenario. Hicimos el mapa con Meshgrid y los assets encontrasdos en el tutorial de Godot.
Retos
Fue dificil configurar Godot Engine con Github, y gastamos algo de tiempo consiguiendo que funcione. Aunque una porción consiferable de los problemas vinieron de dificultades en sintetizar los códigos en los que trabajamos a través de Github, la mayor dificultad fue la escala del proyecto, que complicaba sintetizar sus multiples componentes en un programa únificado.
¿Que aprendimos?
Logramos obtener una mayor comprensión de la escala de hacer un trabajo en 3D y sus dificultades. Adicionalmente, mejoramos nuestra manera de trabajar en equipo.
Built With
- godot
- onshape

Log in or sign up for Devpost to join the conversation.