-

Slide Presentation
-
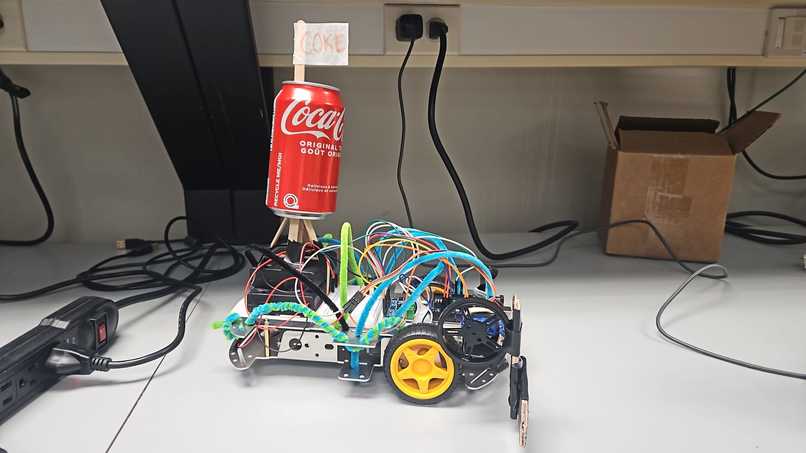
Side Shot
-
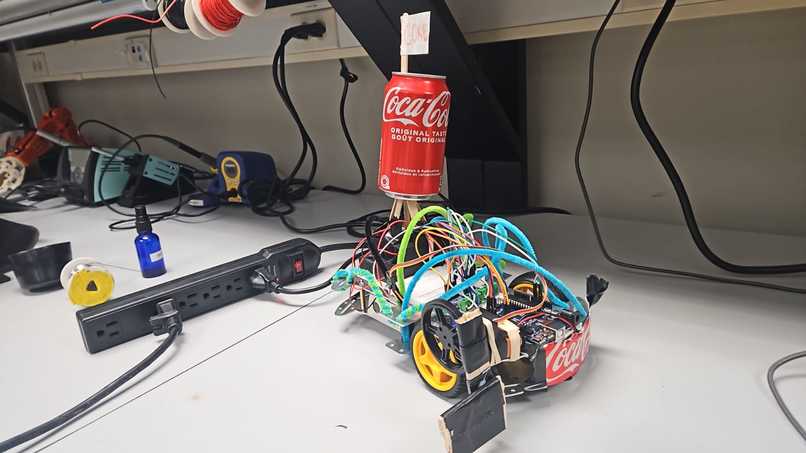
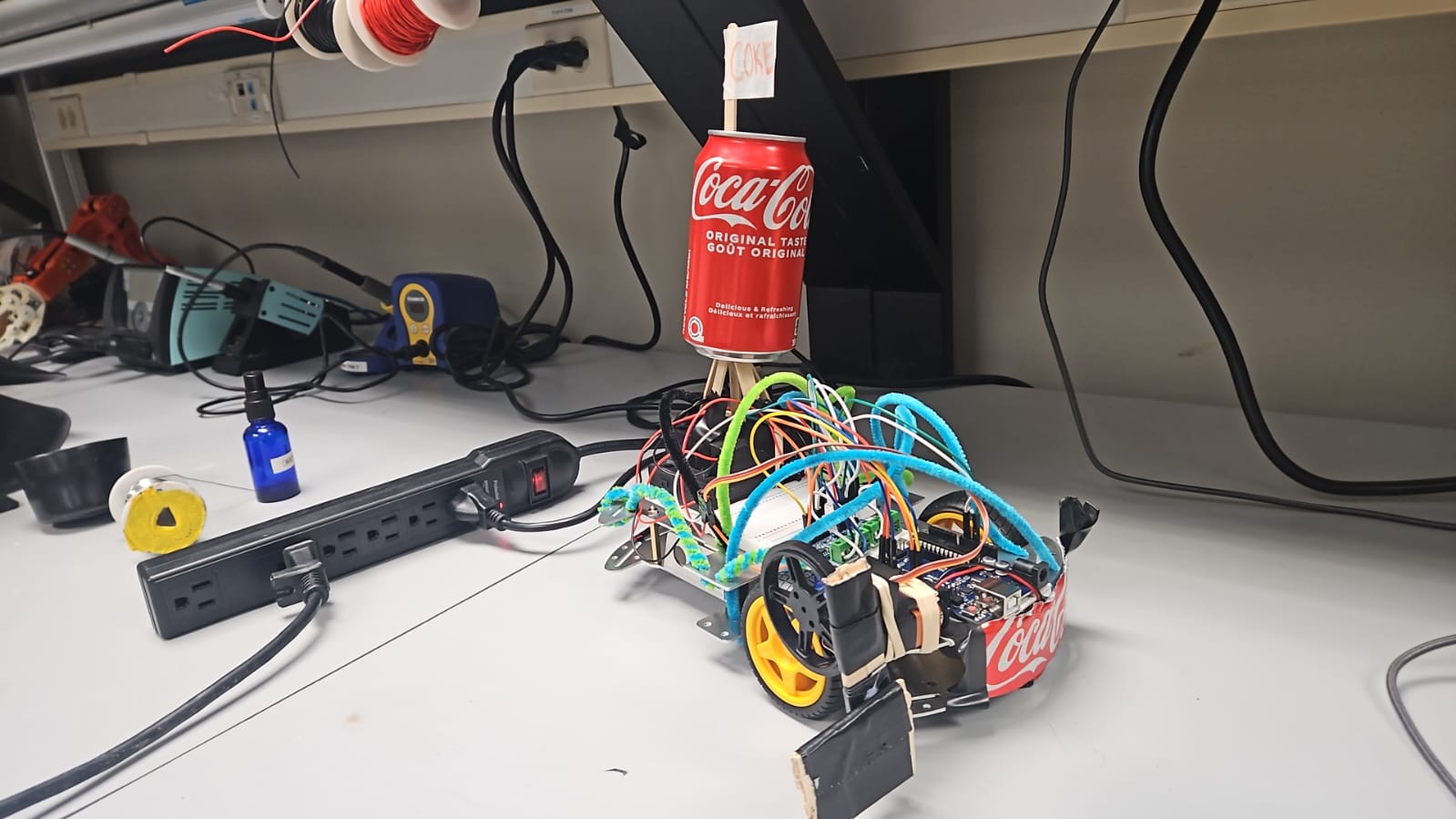
Diagonal Shot
-
Front Shot


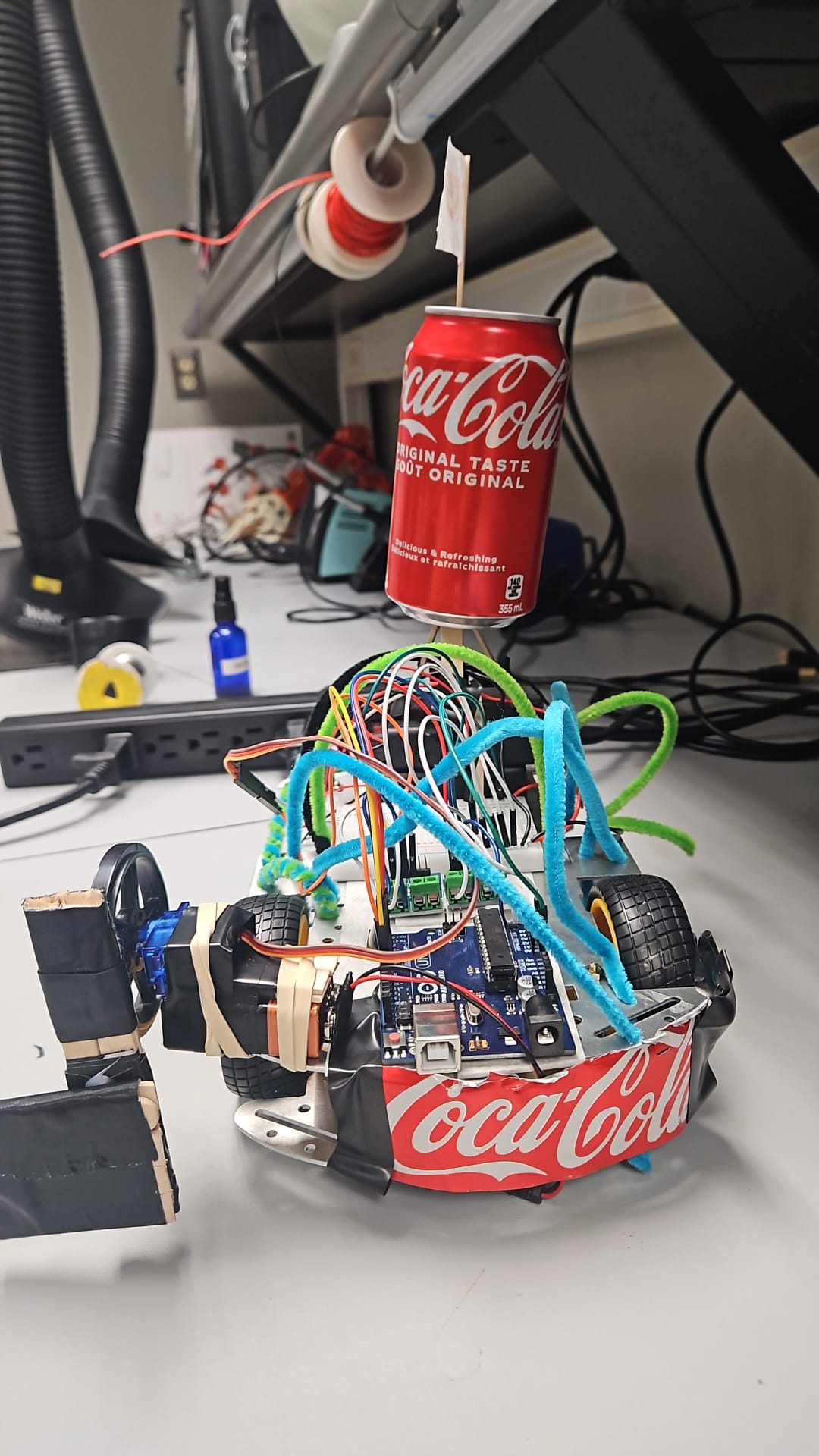
Main inspiration
Our inspiration for the Golf Coke Robot (GCK) was a blend of a Golf cart and Golf player (a golf cart that can shoot with a Club).
Functionalities
The GCK has 3 main functionalities: 1- It can be driven using a left Joystick (in all directions) 2- The Club can be charged with different levels of power to control the Golf ball's trajectory 3- The front can also be used to ram the golf ball as a last resource for tight spots
Building the GCK
The Hardware of the GCK was built using an Arduino Uno board, a bread board for the connections, 2x 2AA batteries for 2 motors (powering the wheels), a Servo motor, a Metal Car Structure, and a Coca Cola Can! For the software, we programmed in Arduino with the Arduino IDE and used the Servo, and Joystick libraries.
Challenges and overcoming them
- We had to balance the power meticulously between the different motors and i/o devices.
- Calibrating the Golf Club
- Wiring correctly the different analog and digital i/o devices correctly in a functioning circuit with the Arduino control board
- The integration testing with the given controller joysticks and managing to rectify discrepancies with our own software implementation.
Accomplishments
The GCK manages to complete the easy golf courses with a Hole-in-One, and it can achieve harder golf courses between 3 and 5 swings. The Golf Club is adjustable and can be calibrated after faulty swings.
Learning
- Coding in Arduino!
- Forming functioning logical circuits
- How to program joysticks to control the robot


Log in or sign up for Devpost to join the conversation.