

What it does
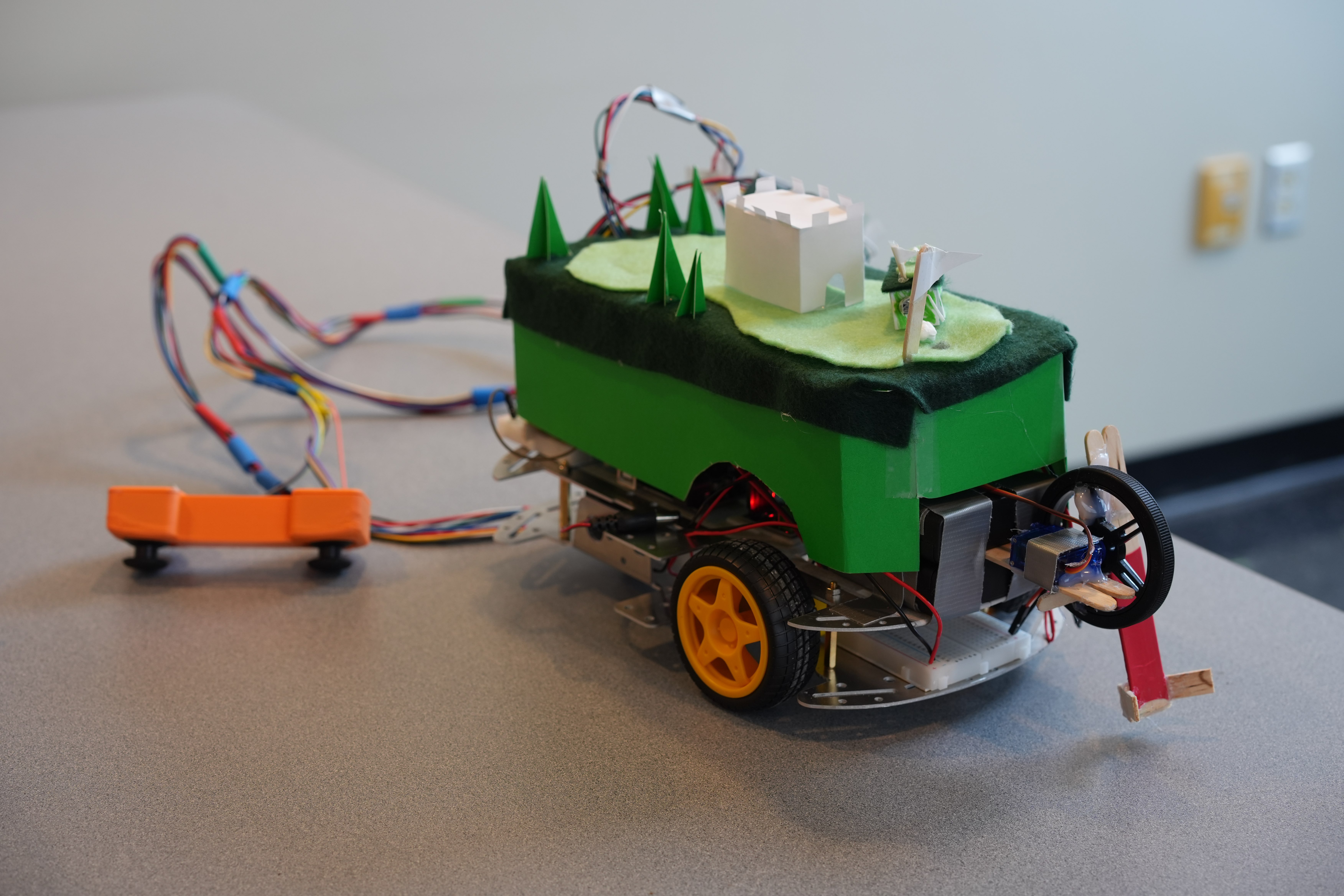
This is a mini-golf robot designed with two independently controlled wheels and a vertical, human-like putter that can adjust to five power levels indicated by LED lights. It's built with a cover dressed up as a mini-gold course to hide all the electronics. Controlled by two wired joysticks, it's easy to maneuver and put, making hole-in-ones effortless. This robot is made for mini-golf players who want a tech-friendly experience without complicated setups.
How we built it
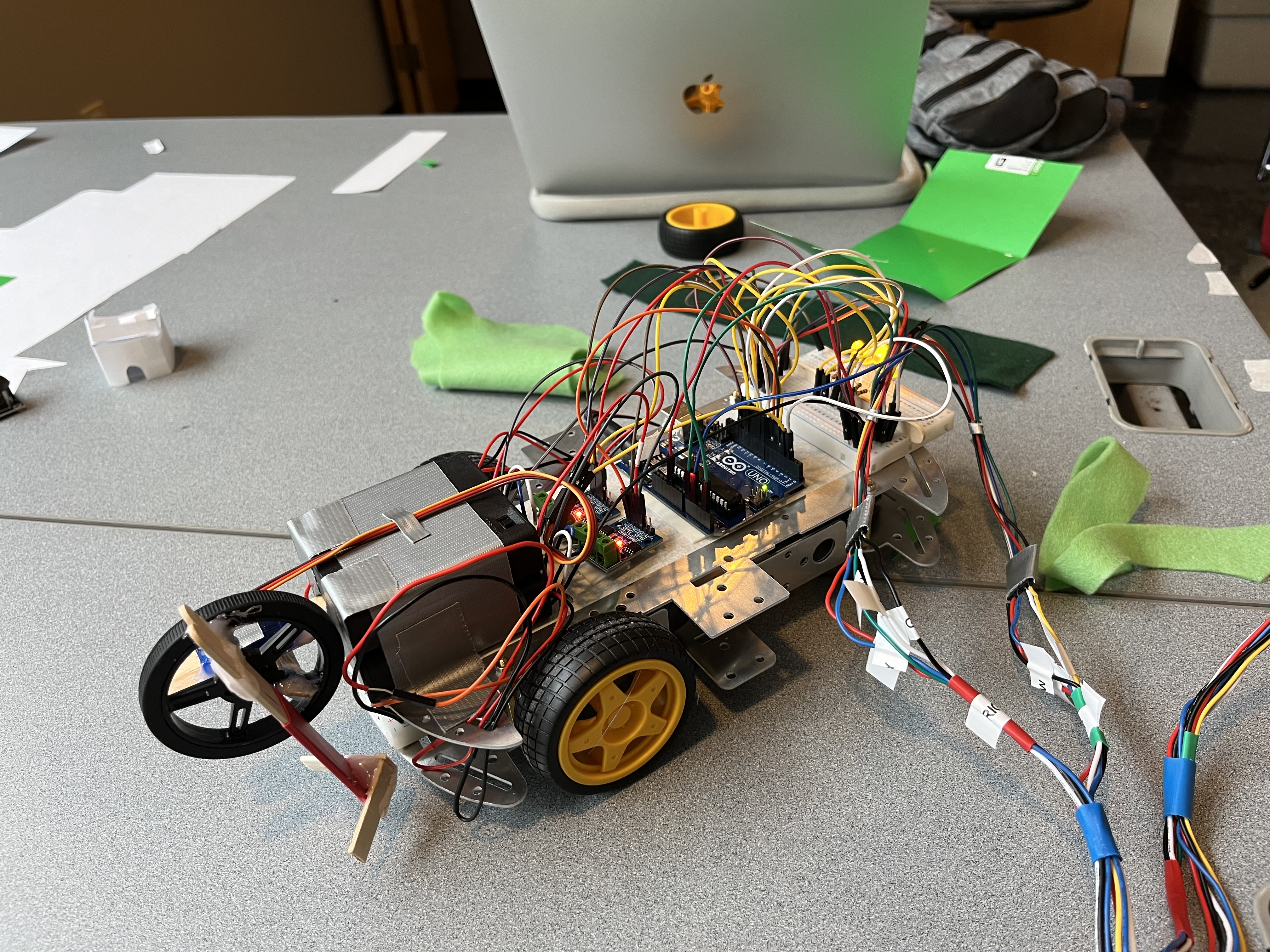
We engineered this robot with functionality and simplicity in mind. It's by two separate wheels, each paired with its own motor for independent control. The putting mechanism is powered by a servo with varying force output. The whole robot is controlled by two wired joysticks.
Challenges we ran into
During development, we encountered issues with inconsistent wheel speeds, which led to challenges in straight and accurate navigation. The putting mechanism also required calibration to ensure that the different power levels translated into the desired putting distances.
Accomplishments that we're proud of
We are especially proud of creating a good blend of minigolfing elements with robotics. The robot's ability to navigate and putt with precision, added to the hidden electronics, shows our commitment to both function and aesthetics.
What we learned
Throughout this project, we've gained insights into robotic mobility and the intricacies of replicating human-like movements in machines, specifically putting techniques in golf. We've also learned the importance of user-centered design, especially when combining technology with traditional sports.
What's next?
If we were to continue on this project, we would refine the robot's function further, ideally introducing wireless controls for enhanced usability. We also see potential in developing smart features, such as automated course navigation and stroke power selection based on real-time environmental analysis.


Log in or sign up for Devpost to join the conversation.