-

Overall setup with Goldfish and Robot
-
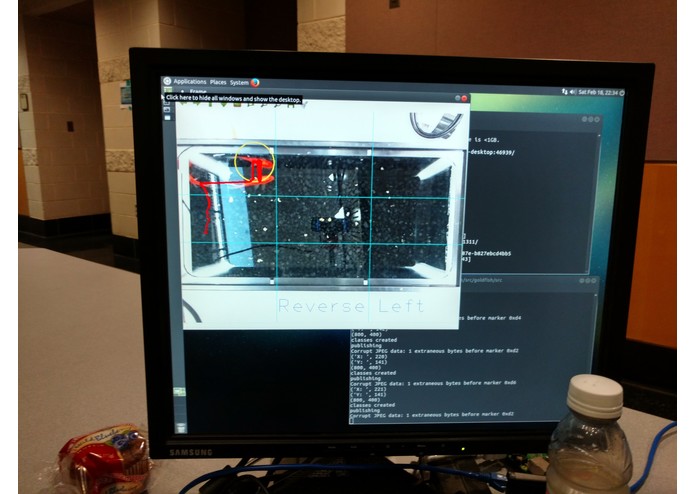
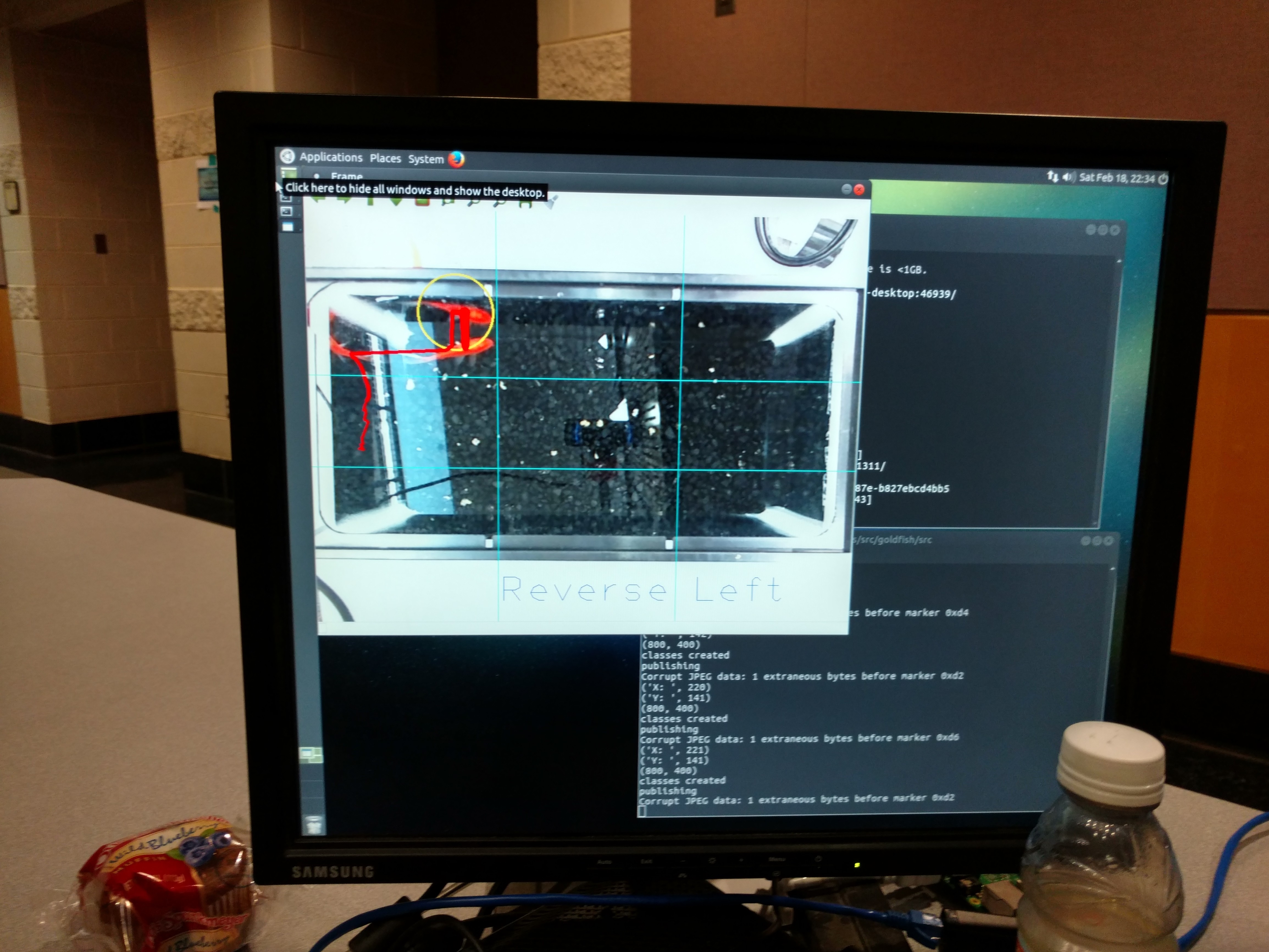
OpenCV identifying location of fish

Inspiration
We saw a youtube video of a goldfish controlling a robot so we wanted to challenge ourselves to do the same thing.
What it does
Computer vision tracks the goldfish and turns its location in the tank into directional commands for the robot.
How we built it
OpenCV running on a Raspberry Pi detects the goldfish based on color and determines where in the tank it is. The location is turned into a velocity command sent via ROS (Robot operating system) to a BeagleBone Black that controls the motors of the robot using GPIO, PWM, and a motor control board.
Challenges we ran into
The main challenge was to get multiple computers connected in a network that allowed them to communicate seamlessly.
Accomplishments that we're proud of
This was the first time we built a whole system in ROS without using code that others have written which was a great learning experience.
Built With
- beagleboneblack
- opencv
- python
- raspberry-pi
- ros

Log in or sign up for Devpost to join the conversation.