-
-
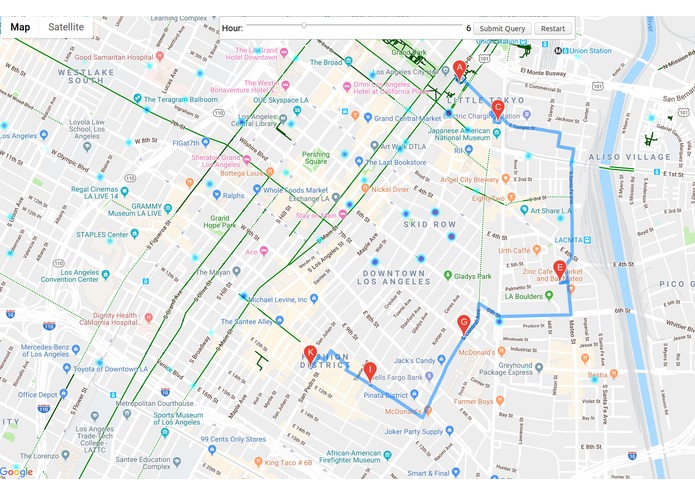
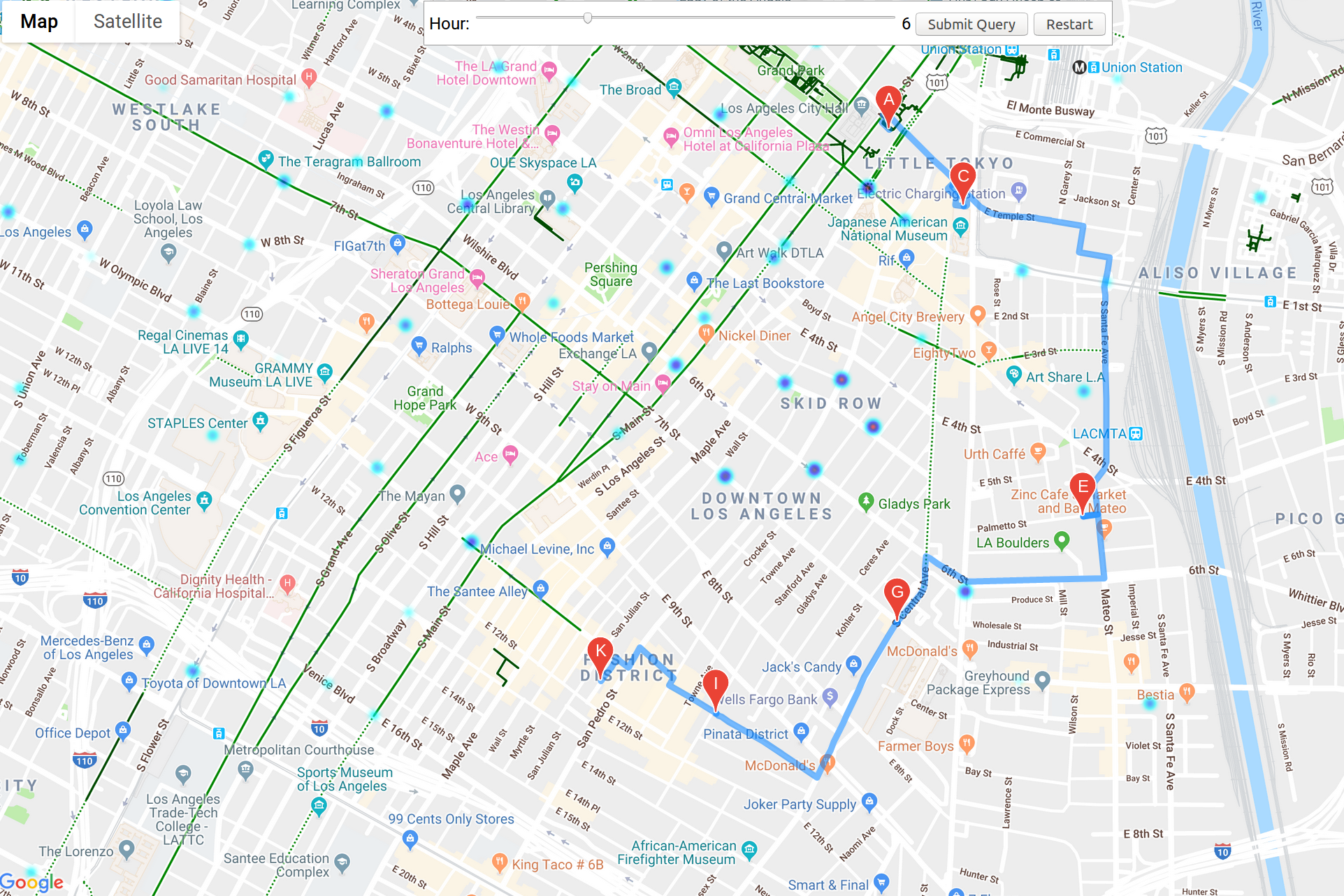
Generates safe and efficient walking and cycling paths
-
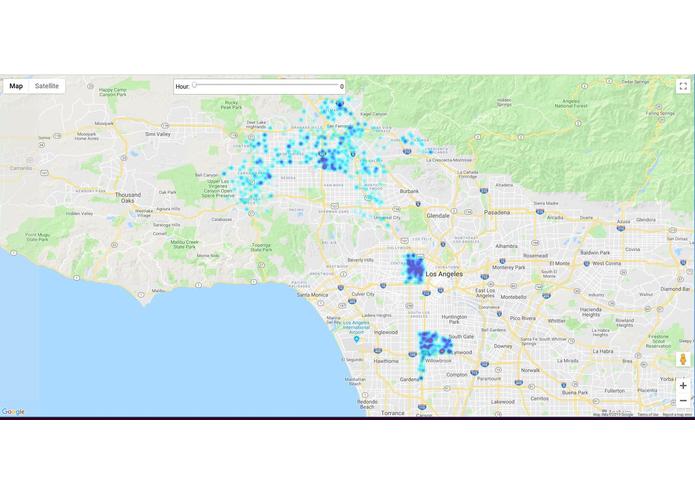
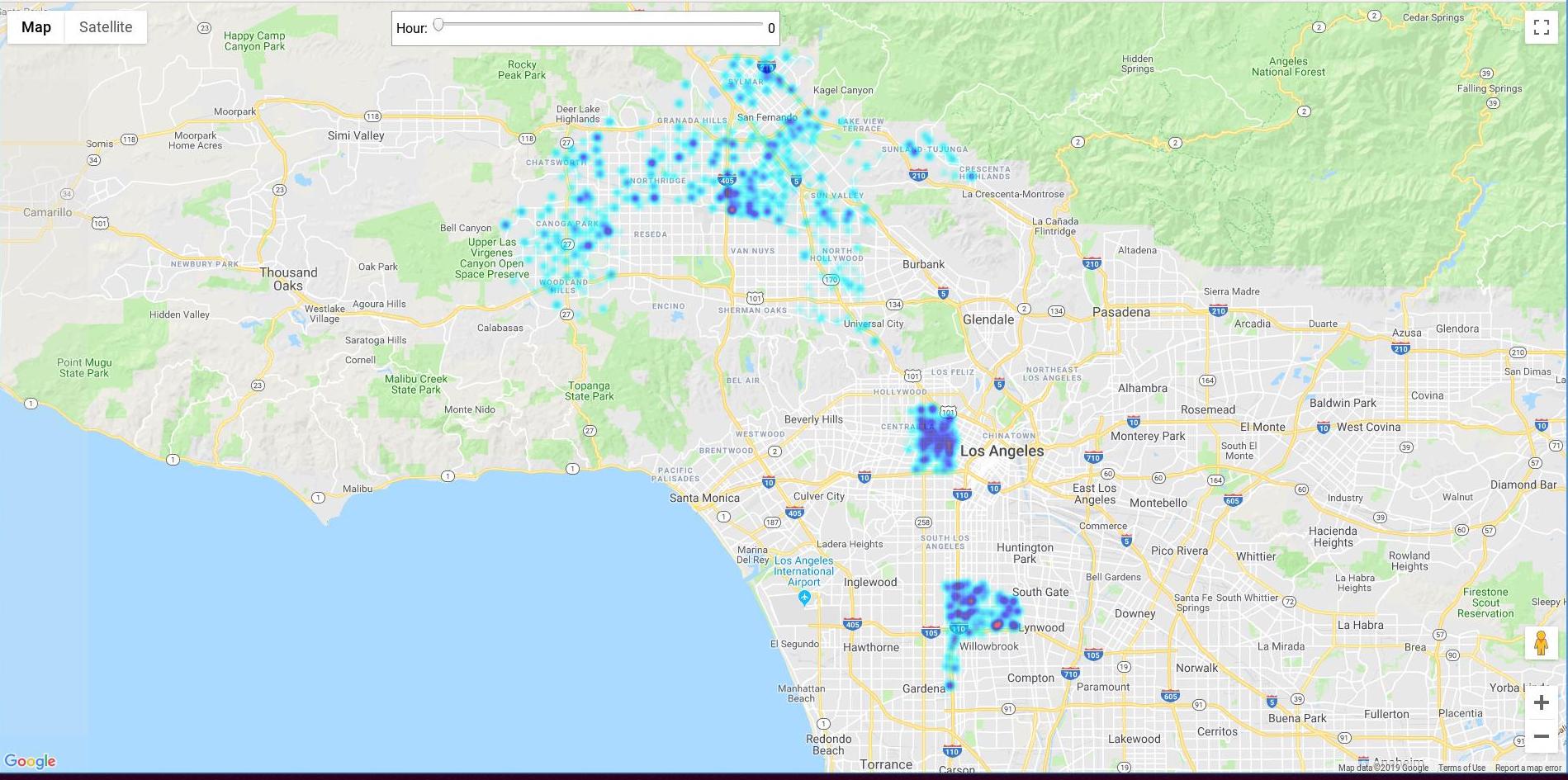
Leverages 9 years of historic data to find crime hot spots
-
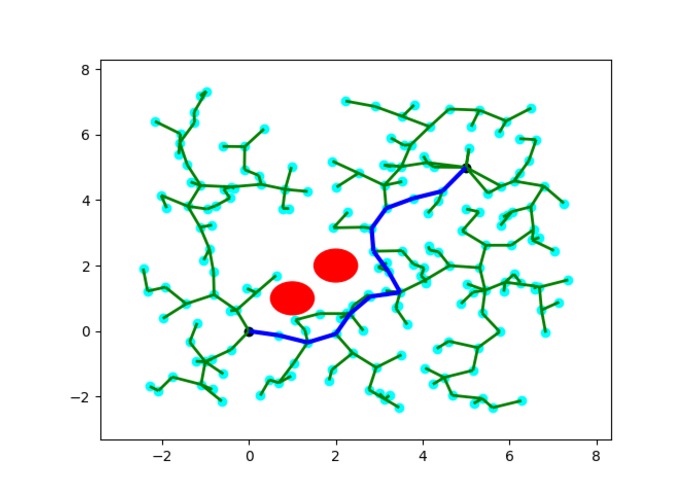
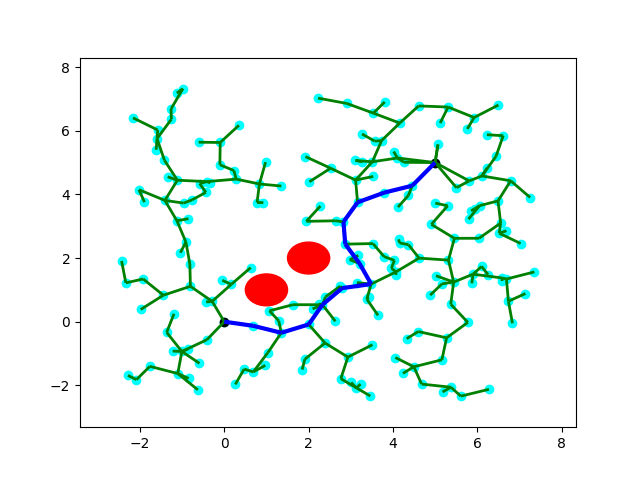
Uses a RRT algorithm for the safest optimal path
-
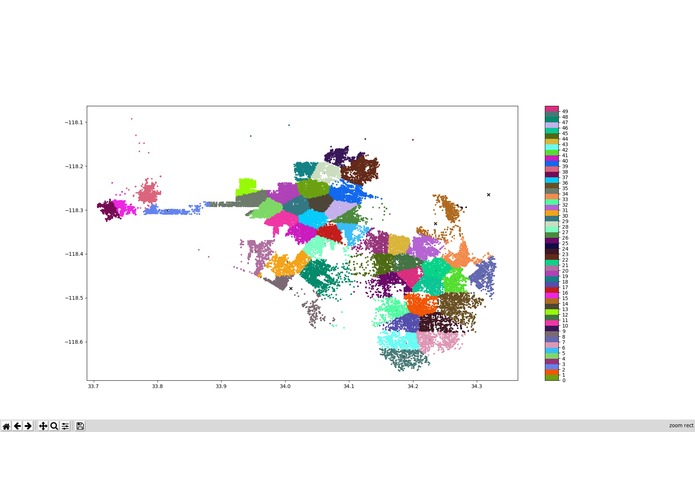
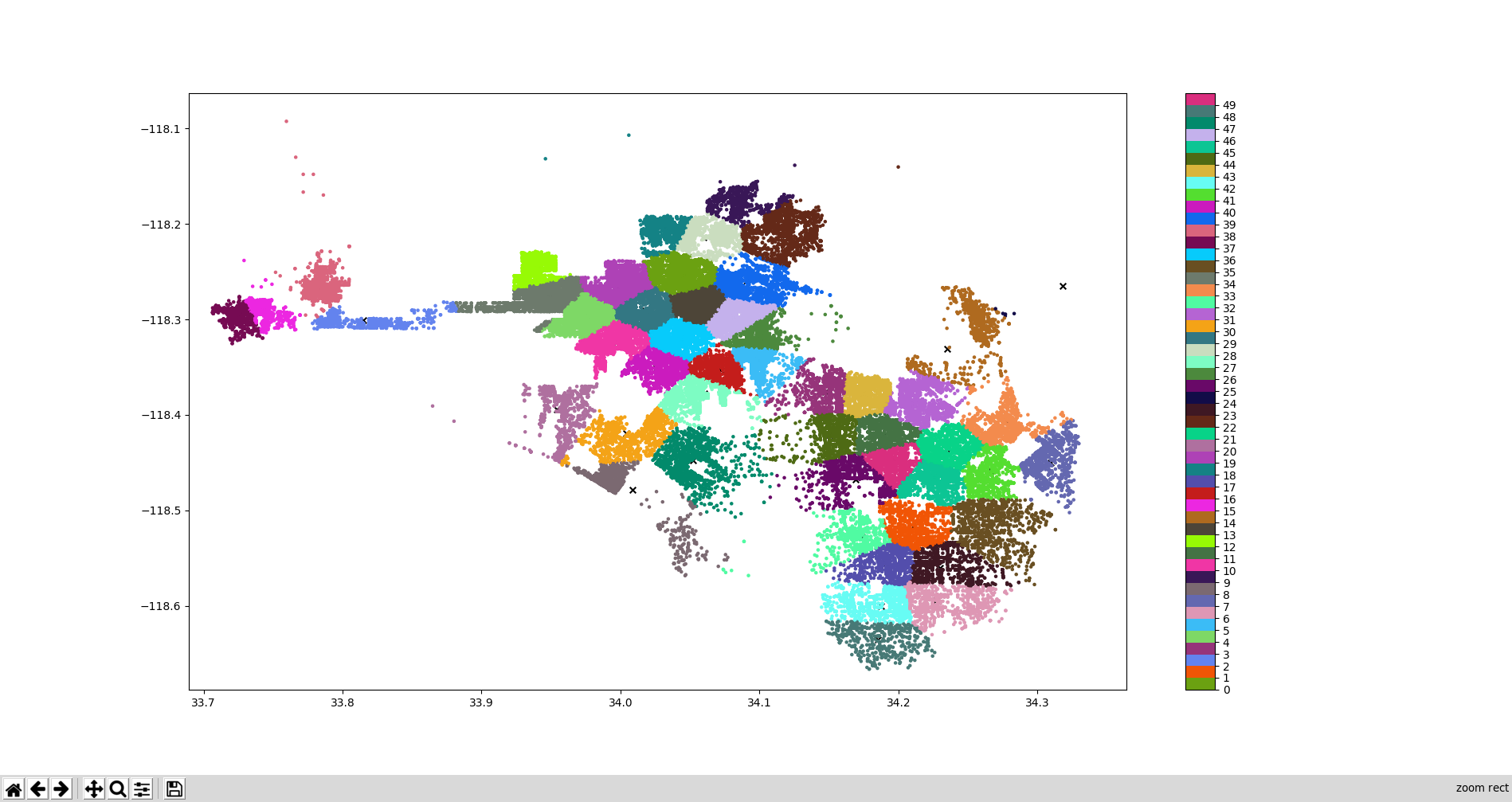
Visualizing K Means Clusters

Inspiration
Los Angeles’s public image has long been defined by the glitz of Hollywood, perfect weather, and bumper to bumper traffic. The reputation of terrible traffic is well earned, but it doesn’t have to stay that way. The easiest way to take cars off the road is to get people to ride public transit, but buses and trains can’t cover every mile of everyone’s commute. This means people will have to walk or bicycle as part of their commute in areas of the city they may not be familiar with. Existing navigation apps like Google Maps or Waze give the fastest route between two places, but don’t factor in how safe that route is. For commuters this could potentially put them in hazardous situations and expose them to undue risk for muggings, being hit by motor vehicles, and other crimes. Our app solves this issue by analyzing nine years of reported crime data by location and time, then using the results in conjunction with Google Maps’ JavaScript API to generate the fastest and safest walking or cycling route between a given start and end point in the City of Los Angeles. We see the potential benefits of this to be massive. Not only could this make LA safer for tourists who are unfamiliar with the city to navigate during their visit, it could improve the city’s traffic by giving regular commuters a safe and efficient alternative means of transportation. This would have the added a benefit of reducing the carbon dioxide emissions that come with traffic, which improves the air quality and is beneficial for the environment.
What it does
We harvested crime data from DataLa and considered them in the path finding. Using Python and Java script we parted LA in little squares and assigned danger levels to each. Then a RRT should find the best path from the start to the goal avoiding areas with a high crime rate.
How we built it
The first step we implemented was the recovery and cleaning of the Crime Data-set. In the next hours we clustered LA into zones with distinct danger levels. From there on we displayed this clusters in the Google maps API. After getting comfortable with the API we wrote a class that is able to display a path based on keypoints we submitted. Additionally a RRT-pathfinding algorithm was impemented and made it run on a python server in order to communicate with the Javascript program we wrote. The RRT finds a way through LA avoiding unwanted areas and creating key points to send to our Java script programm.
Challenges we ran into
The work packages should be very clearly defined additionally it should be clear how results from different programming languages can be transmitted. Furthermore, if algorithms are used one should always check if there is already a widely used version somewhere in the internet. And overall, planning helps.
What we learned
Planning is important. The most work is not done after 12am. Technology to use and its connectors should be defined beforehand.


Log in or sign up for Devpost to join the conversation.