-
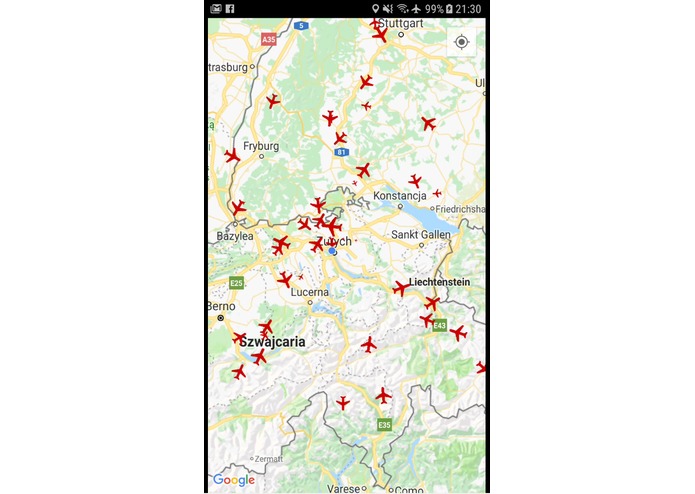
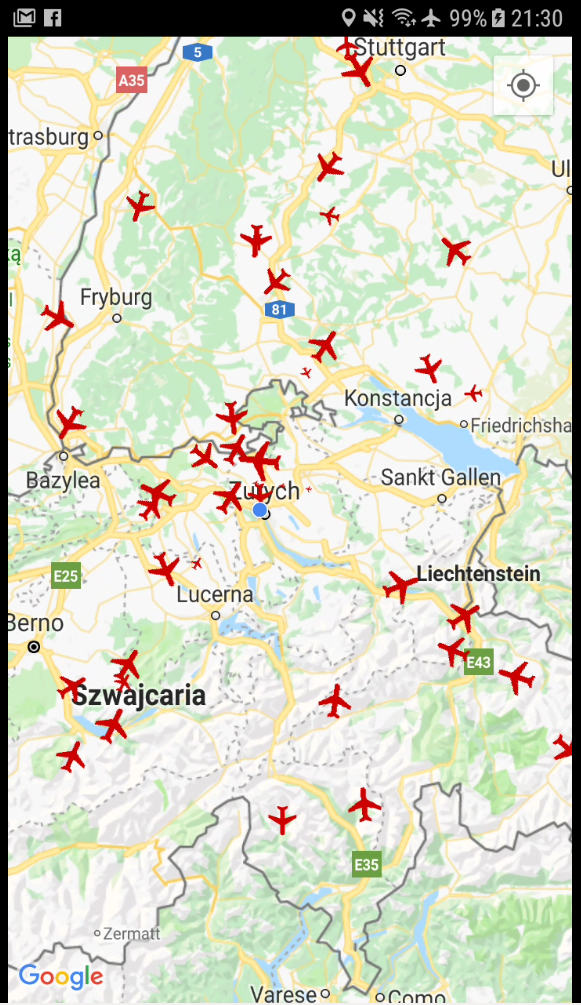
Map application with plane traffic
-
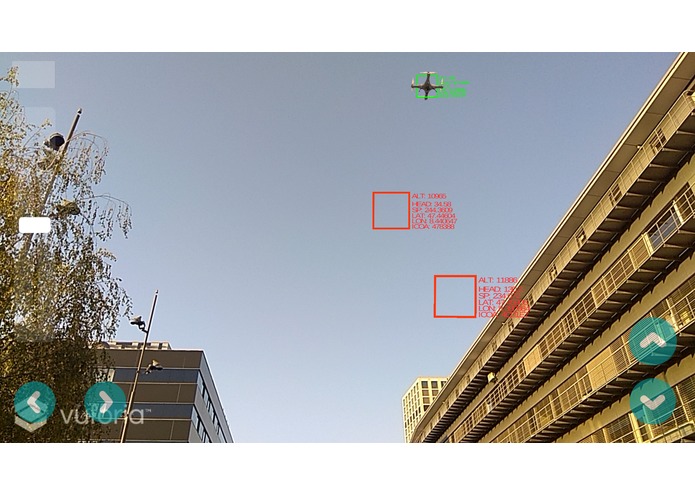
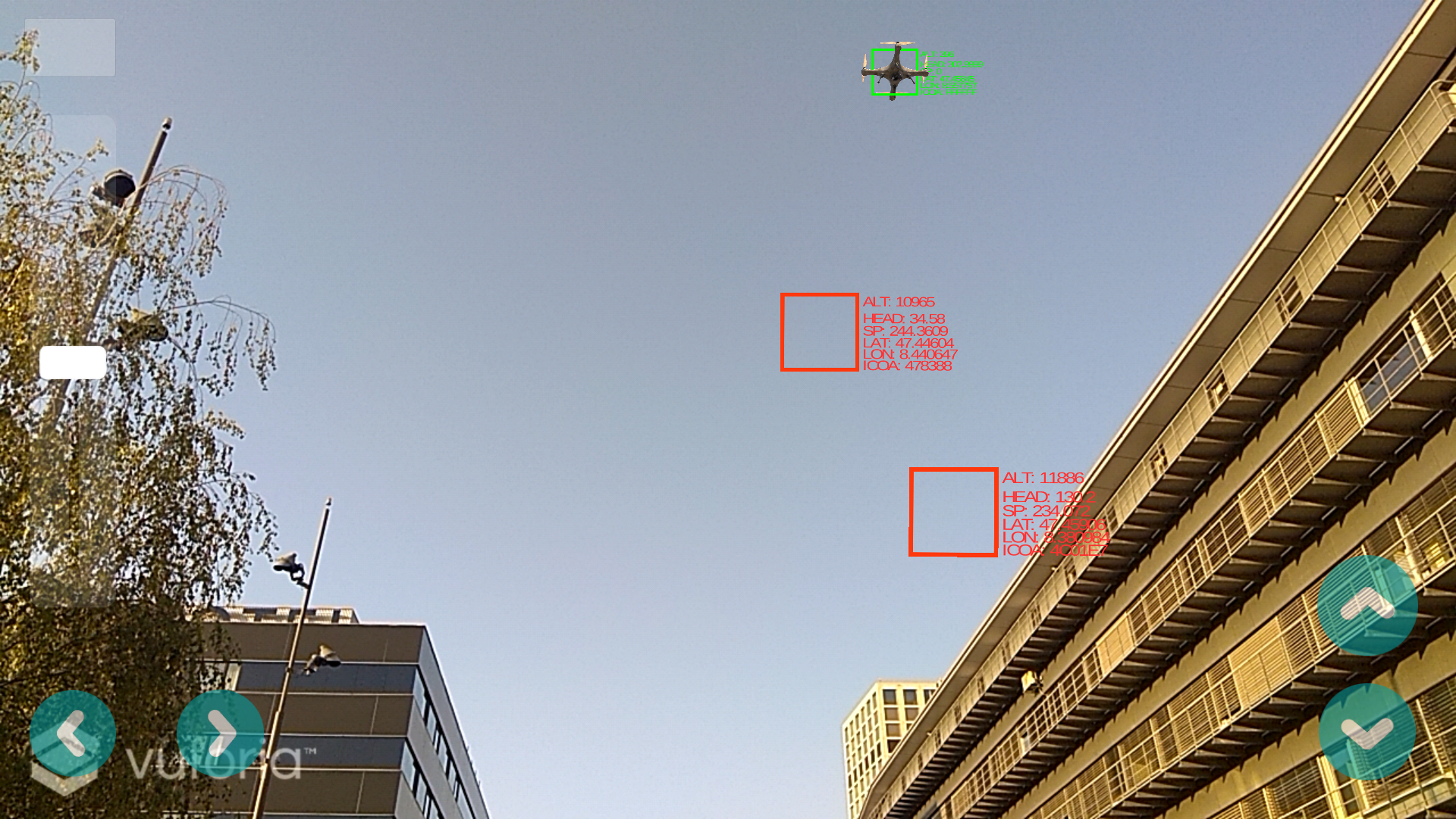
Our drone (we control it) in green frame and 2 planes (red frames)
-
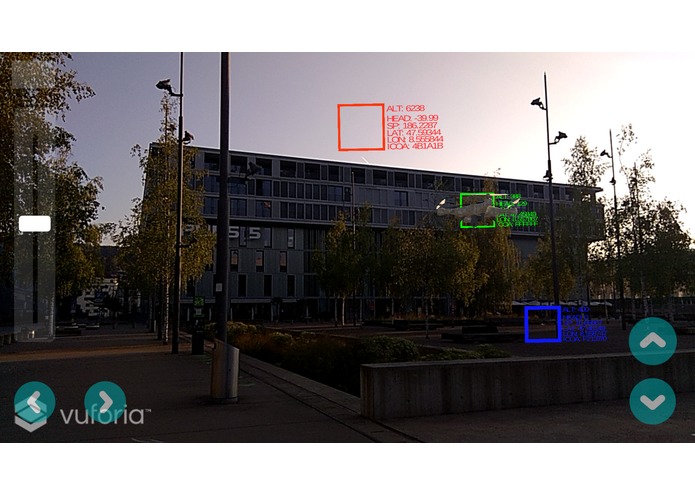
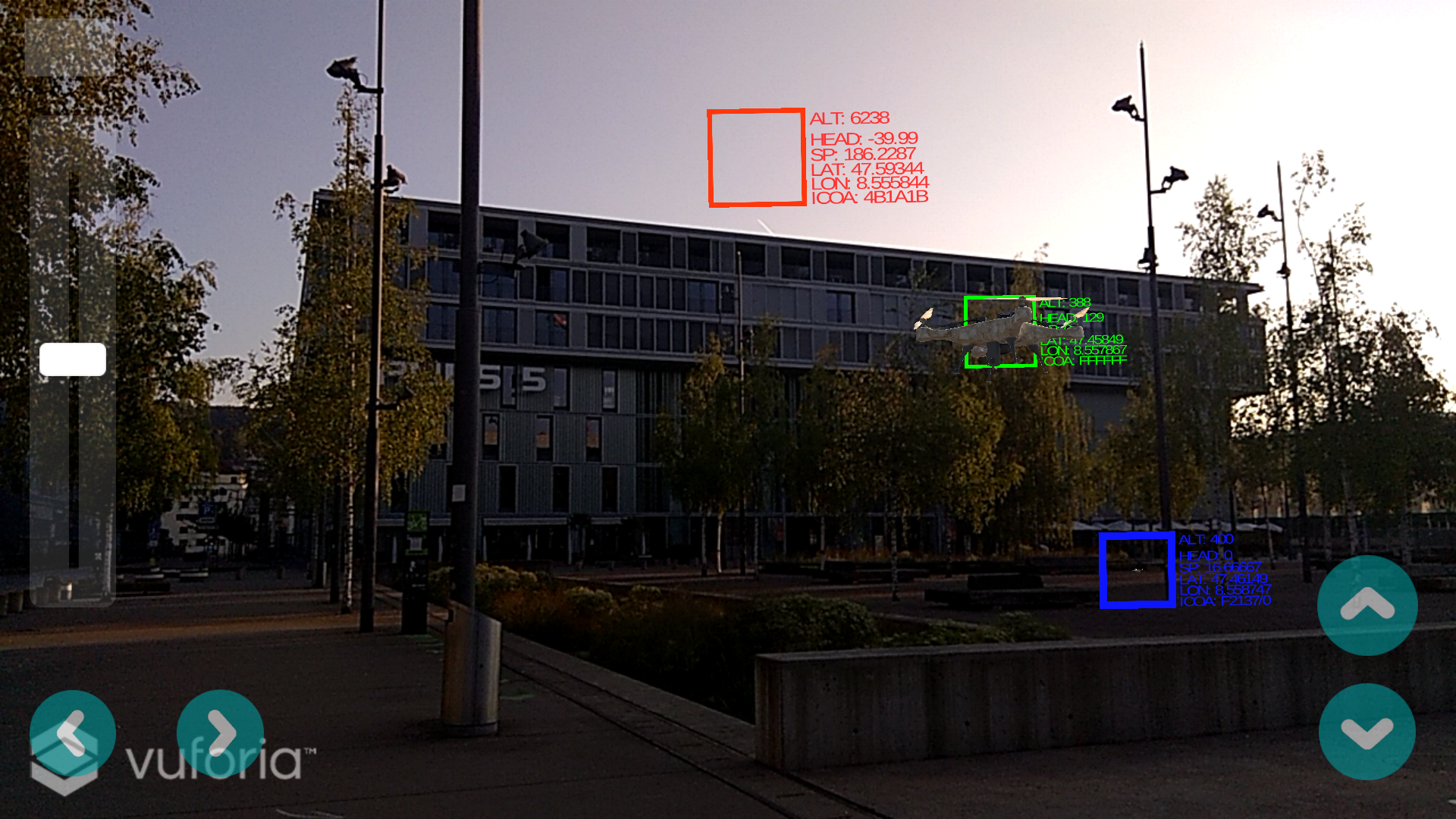
Our drone (we control it) in green frame, 1 planes (red frame) and 1 other drone (blue frame)
Inspiration
The inspiration originates both from the advancements in the self-driving cars and growing interest in automated drone applications (delivery, large areas monitoring, etc.). We believe that bringing a user friendly collision avoidance algorithm presented with Augmented Reality is not only aimed at pushing further the safe autonomous flying technology but also at raising interest in this area of development.
What it does
Our solution analyses the live air traffic data in Switzerland and neighbouring countries and combines it with simulated drone traffic in the cloud backend. Based on this backend we provide 2 ways of visualization: (1) Android Application created with Unity providing the user with the AR drones and planes overlay - you can look around and see the planes and drones flying in your vicinity. (2) Android Application with 2D map on which all the planes and drones displayed as small markers.
On top of that the AR Android App user can pilot his own drone which is equipped with our prototype of the collision avoidance algorithm. The algorithm ensures that the drone will never get destroyed (GoDMode). When the drone is on collision course with other air craft the controls are taken over from the human operator until the dangerous situation is resolved.
Interestingly, we provide a convenient cloud entry point to simulate artificial air crafts. Thanks to that any number of Android apps can participate in the air traffic and they will all see each other (multi-player). Also, if someone prefers desktop environment, he can choose any language with HTTP POST or PUT support to easily create any aircraft pattern on top of real existing traffic and simulated traffic generated by other users. It is a perfect tool for collision avoidance algorithm development workshop. All the participants could use any technology of their choice in competition to develop the best collision avoidance algorithm on the common platform.
How we built it
For the backed that glues everything together and ensures multi-player experience we used Flask server (Python) deployed on Cloud-Foundry.
For the Augmented Reality Android application we used Unity and Vuforia (library for Agumented Reality).
For the map Application we used Kotlin and Google APIs.
Challenges we ran into
In our solution we are using plethora of technologies and frameworks and it was sometimes challenging to make them all work together. We also discovered how complex is the problem of designing robust collision avoidance algorithm in 3D space with large number of air crafts.
Accomplishments that we're proud of
We are really proud that both the map and AR applications are functioning in the way we planned at the beginning. We are also happy that the backend implementation allows for traffic simulation by many users at the same time which creates a multi-player experience.
What we learned
First of all we learned that air traffic is extremely interesting and full of surprises. We also learned to appreciate how difficult it is to design collision avoidance strategy that is suitable for all possible multi-player scenarios.
What's next for GoDMode
We strongly believe that the next step for GoDMode is incorporation of the advanced Computer Vision algorithms for object detection in order to ensure collision avoidance with all types of objects that not necessarily advertise their position over radio protocols. We also are interested in the possibility of using the new technologies of detecting distance by changing the focal length and probing the sharpness of visible objects. All these together can allow for safe in-building flights, as well as secure landing and building to building delivery.






Log in or sign up for Devpost to join the conversation.