Inspiration
The idea for the Gesture-Controlled Robotic Arm was sparked by the growing trend of intuitive human-machine interactions. I was fascinated by the concept of controlling machines in a way that mimics natural human gestures, eliminating the need for complex controls or interfaces. This project aimed to bridge the gap between human intent and robotic actions, making it possible to control a robotic arm as easily as moving your hand.
What it does
The Gesture-Controlled Robotic Arm is an advanced system that allows users to control a robotic arm using simple hand gestures. By integrating a camera and servo motors, the arm can precisely mimic the user's hand movements, enabling tasks like picking up objects, rotating them, or even directing a camera to capture specific angles. The system interprets the gestures in real-time, allowing for seamless and intuitive control over the arm's movements and camera direction.
How I built it
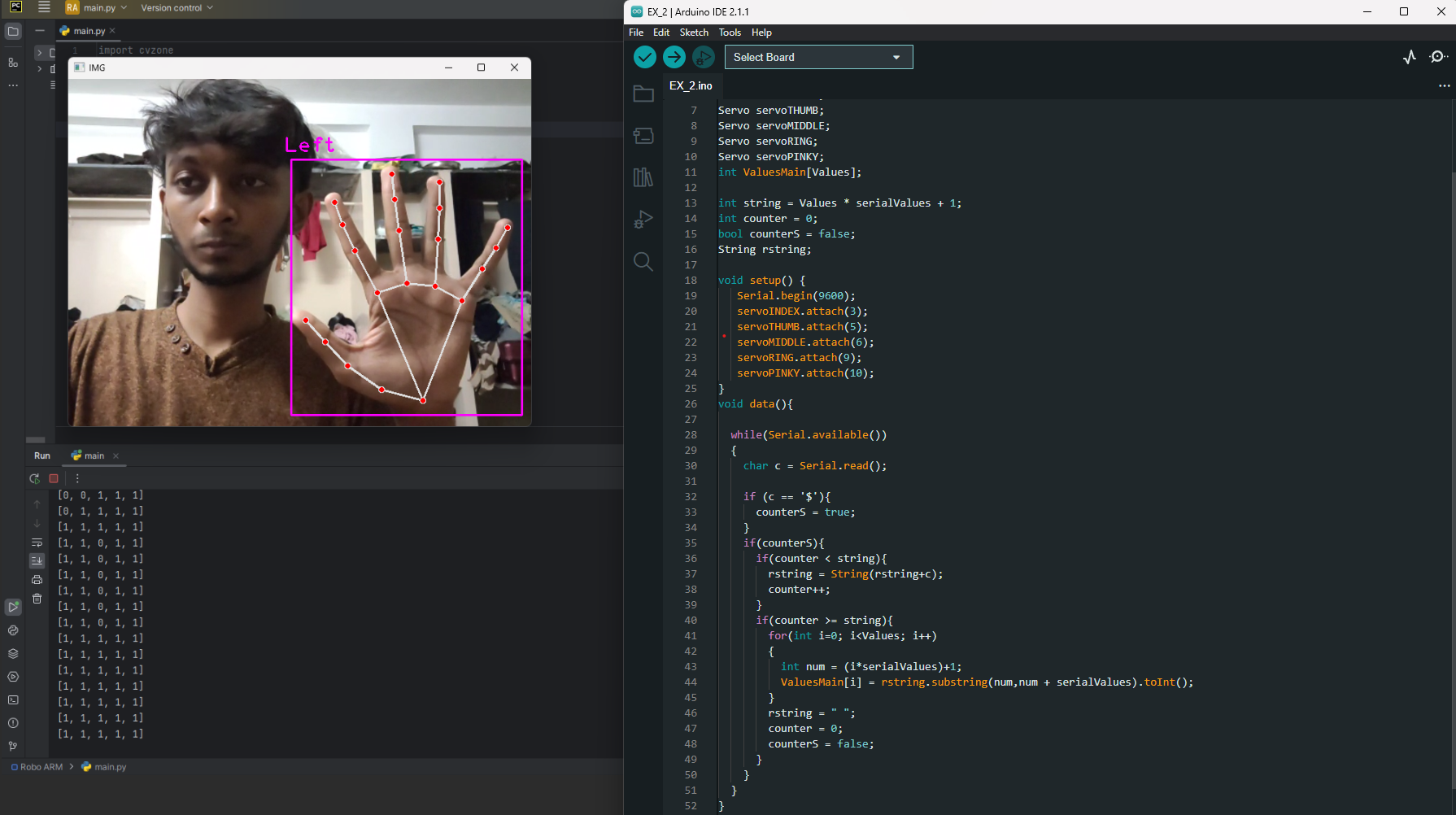
To build this robotic arm, I started by designing a robust mechanical structure that could perform complex movements. The arm is powered by servo motors, which are controlled by a micro-controller. The key component of the system is the camera, which captures the user's hand gestures. I employed advanced computer vision algorithms to detect and interpret these gestures, translating them into corresponding movements for the robotic arm. The software side was developed using Python and OpenCV, while the hardware was assembled and tested to ensure precise and smooth operation.
Challenges I ran into
One of the main challenges was ensuring the accuracy and responsiveness of the gesture recognition system. The computer vision algorithms had to be finely tuned to differentiate between subtle hand movements and gestures in various lighting conditions. Another challenge was synchronizing the servo motors with the gesture inputs to achieve smooth and realistic arm movements. Debugging and refining the system to handle real-time processing without lag was also a significant hurdle.
Accomplishments that I'm proud of
I'm particularly proud of successfully implementing a gesture recognition system that works reliably in real-time. The fluidity and precision of the robotic arm's movements are a testament to the rigorous testing and optimization that went into the project. Another accomplishment is the seamless integration of the camera with the arm, allowing for intuitive control over both the arm and the camera direction with simple gestures.
What I learned
This project taught me a lot about the intricacies of computer vision and its application in real-time systems. I gained hands-on experience in using OpenCV for gesture recognition and learned how to optimize algorithms to run efficiently on hardware with limited processing power. Additionally, I deepened my understanding of servo motor control and the challenges of synchronizing mechanical movements with software inputs.
What's next for Gesture-Controlled Robotic Arm
Looking forward, I plan to enhance the Gesture-Controlled Robotic Arm by incorporating more advanced gestures and expanding its range of motion. I’m also considering adding features like haptic feedback to provide users with tactile responses, making the control experience even more immersive. Another goal is to explore the use of machine learning algorithms to improve gesture recognition accuracy and adapt to different users' gesture styles. Ultimately, I aim to apply this technology in practical scenarios such as remote surgery, industrial automation, or assistive devices for individuals with disabilities.

Log in or sign up for Devpost to join the conversation.