-

Image
Inspiration
Gesture control is becoming a popular technique integrated into the growing area of virtual reality and rehabilitation. The popular Myo Armband achieved this using Electromyography (EMG) sensors placed on the forearm. However, this device was recently discontinued from production, leaving a gap in the marketplace.
What it does
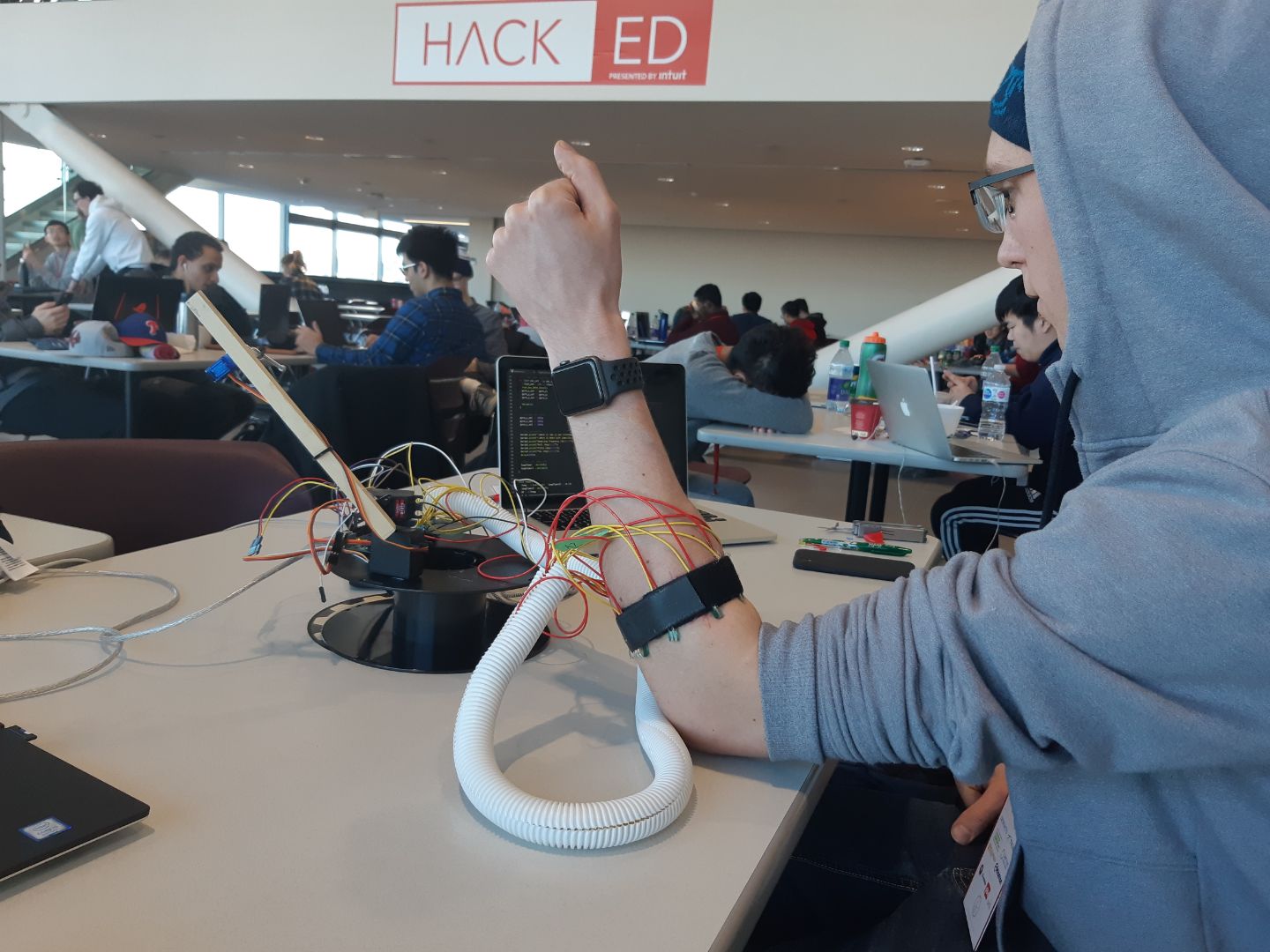
We achieved the same result as the Myo Armband, using a unique method involving Force Sensitive Resistors rather than the expensive EMG sensors. These sensors are much cheaper compared to EMG sensors. They are wrapped around the users forearm and measure pressure changes resulting from different muscle configurations. We use a desktop robotic arm in order to demonstrate the gesture control.
How I built it
This was entirely constructed in the 24 hour time limit at the hackathon. This included:
- Hardware design and construction
- Mechanical design and construction
- Machine learning algorithm design and implementation
- Implementation of trained model onto functioning hardware
- All software involved in reading and mapping sensor data
Challenges I ran into
- Non-repatability in the FSR sensors due to the compliant wristband used caused for many retraining sessions to be required
Accomplishments that I'm proud of
- Successfully classify 4 different gesture controls
- Successfully control a 3 DOF robotic arm
What I learned
- How to train and design various classifiers in MATLAB, and how to export the trained model to a real-time device
- Cable management
What's next for Gesture Controlled Desktop Robotic Arm
- A more robustly designed mechanical wristband would allow for better repeatability, and likely more classification options
Built With
- arduino
- c++
- hardware
- human-computer-interaction
- machine-learning
- matlab
- svm


Log in or sign up for Devpost to join the conversation.