


Inspiration
I always wanted to work on a gesture-controlled robot that can be controlled by my changing the orientation of my hands. So this weekend I worked on a gesture-controlled robot using two ESP32 boards.
What it does
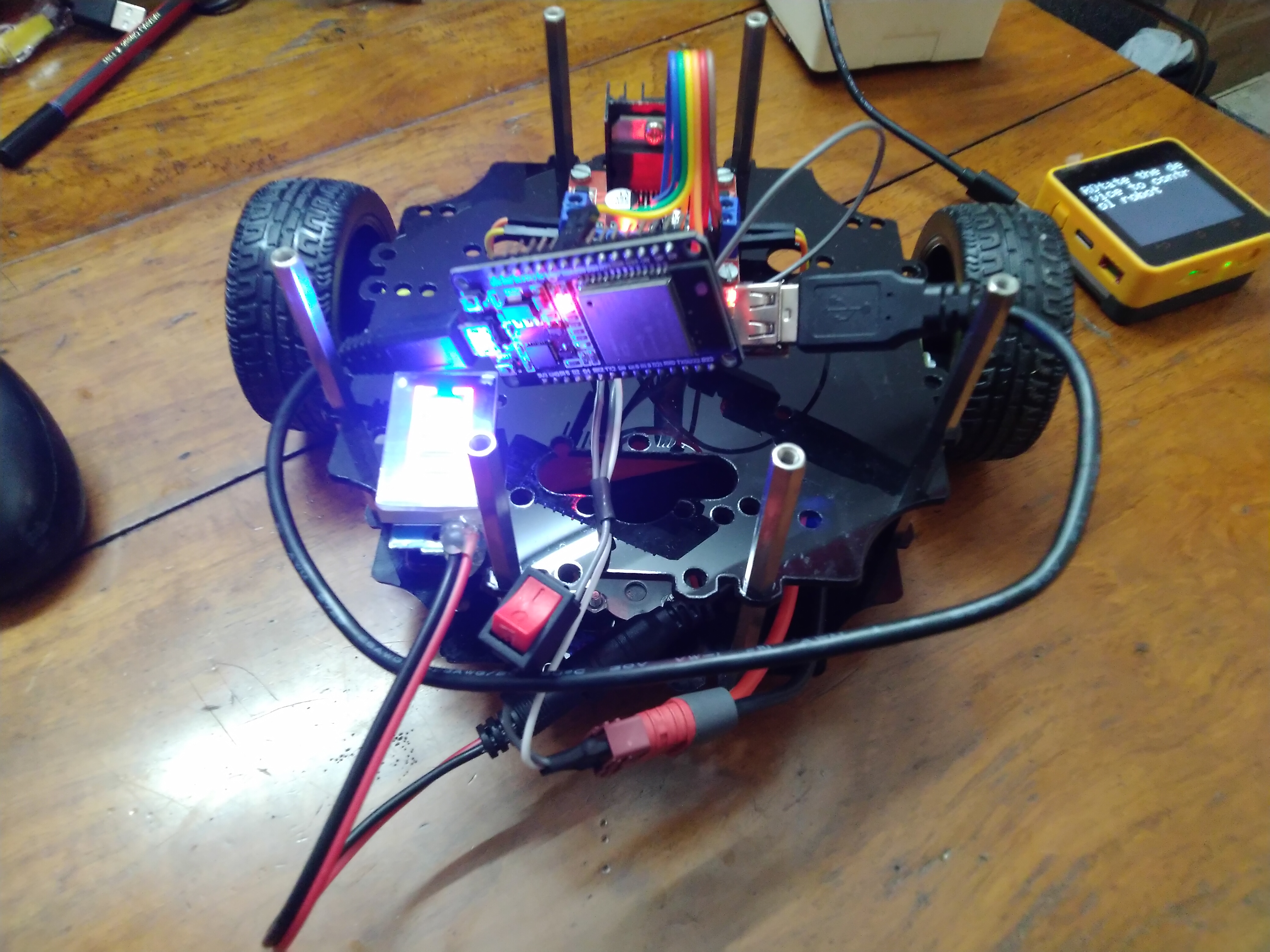
It is a gesture-controlled robot that is controlled by sending commands from an M5Stack ESP32 board and another ESP32 receives the command for motor control.
How we built it
I used a M5Stack ESP32 board which contains an in-build IMU sensor for detecting the gestures. The gestures are detected using the accelerometer. The acceleration in the X and Y axis data are send to the onboard EPS32 of the robot using the ESP-NOW protocol.
Challenges we ran into
Finding a way to send the accelerometer data of the IMU from the M5Stack to the ESP32 on the robot was a bit challenging. Initially, I decided to use Bluetooth protocol but it was not working properly according to my needs. So after a lot of research, I switched to ESP-NOW protocol.
Accomplishments that we're proud of
As one can see in the video, the robot obeys my commands.
What's next for Gesture Control Bot
I intend to include some graphics in the display of the M5stack board so as to make it more impressive and interesting.

Log in or sign up for Devpost to join the conversation.