Inspiration
We wanted to try a hardware we were not familiar with at all
What it does
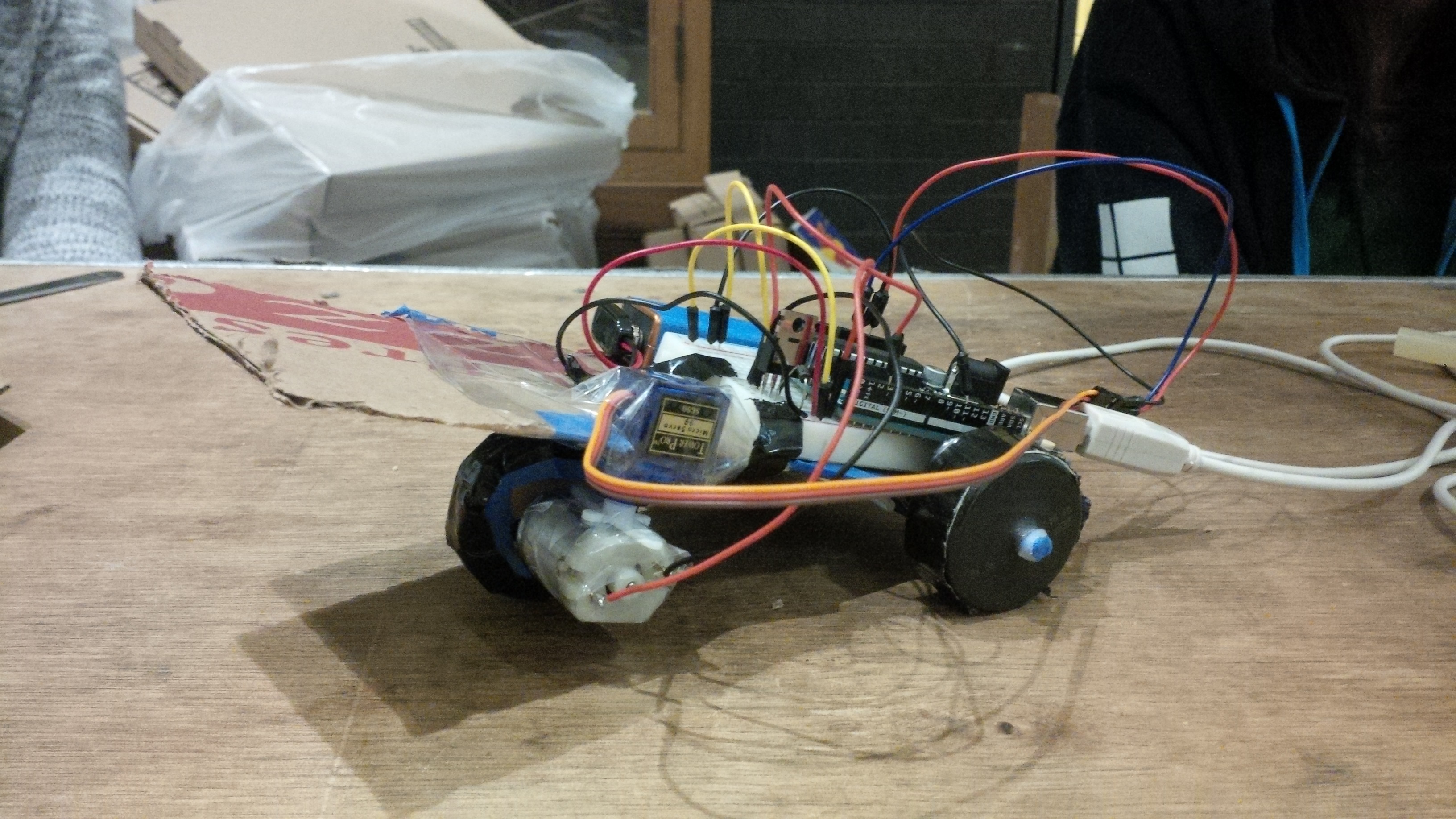
The project enables the user to move the robot left, right and forward using only hand gestures. This is enabled by utilizing the EMG data of our arm and categorizing it into different gestures
How I built it
The two big parts were to get the MYO armband to start talking to the arduino microcontroller to send our body EMG signals over. Then this data was used by arduino to rotate motors accordingly.
Challenges I ran into
The lack of hardware resources that were available to us to build the robot from scratch.
Accomplishments that I'm proud of
Being able to work with limited resources and still having a mostly functional prototype.
What I learned
How to use the MYO gesture control and interfacing it with Arduino, building robots from a mechanical and electrical perspective.
What's next for Gesture Bot
Build a sturdier base with more motors for extra stability and aesthetics.


Log in or sign up for Devpost to join the conversation.