-
-
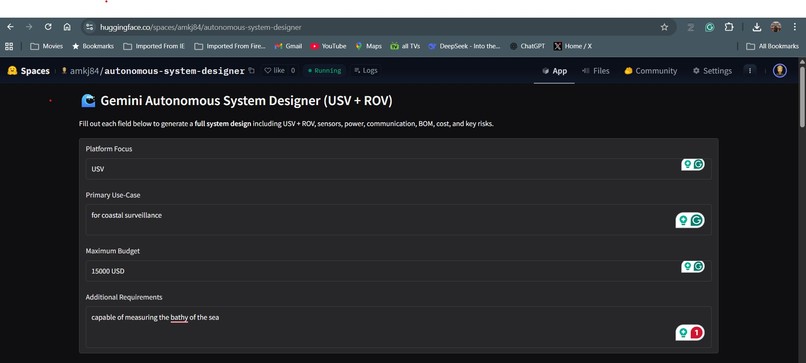
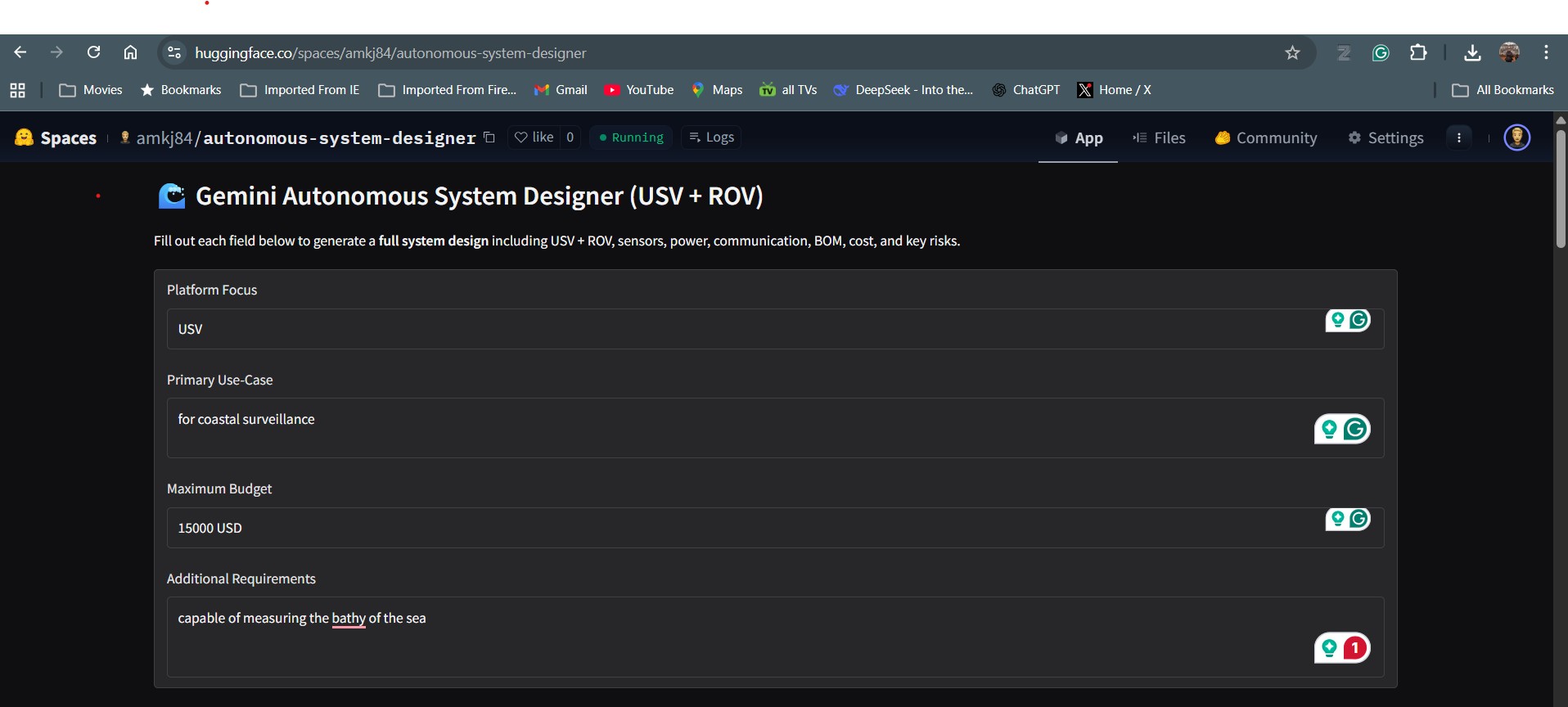
GUI of the application
Inspiration
The idea for this project came from my interest in autonomous maritime systems and the challenges of designing USV (Unmanned Surface Vehicle) and ROV (Remotely Operated Vehicle) systems. I wanted to create a tool that allows engineers, hobbyists, or students to quickly generate structured system designs for dual-platform autonomous missions without spending hours researching component specifications or integration details.
What it does
The Gemini Autonomous System Designer is a web-based application that generates complete dual-platform autonomous system designs for USVs and ROVs using the Gemini 3 API.
Users enter structured mission requirements such as platform focus, use-case, budget, and additional constraints. The system then produces a technically structured design that includes:
Mission summary and system architecture
USV and ROV subsystem specifications
Sensor suite recommendations
Power and communication system design
Bill of Materials (BOM) and cost estimation
Key risks and engineering considerations
The application provides real-time feedback through a progress indicator and displays the time taken to generate the design. Users can also download the generated system design as a PDF for documentation or sharing.
By combining AI-driven reasoning with structured engineering outputs, the tool helps engineers, students, and developers rapidly conceptualize autonomous maritime systems.
How I built it
AI Integration: Used the google-genai Python library to interact with Gemini 3 API.
Structured Inputs: Designed multiple input fields for Platform Focus, Mission Use-Case, Budget, and Additional Requirements.
Markdown Output: The AI generates a well-structured system design in Markdown format, covering USV, ROV, sensor suite, power, communication, BOM, cost, and key risks.
User Interface: Built a Gradio app with:
Input fields for structured data
A progress bar while the AI generates results
Elapsed time display
Downloadable PDF button for offline access
Deployment: Published publicly on Hugging Face Spaces for easy access and demo.
Challenges I ran into
Some challenges I faced included:
Learning to use the new google-genai library after the older google.generativeai was deprecated
Formatting AI-generated output into well-structured Markdown suitable for PDF export
Managing the asynchronous user experience, so the progress bar and elapsed time displayed accurately
Ensuring the app remained simple for hackathon judges while still providing comprehensive system designs
Despite these challenges, the app now allows a user to generate a complete, detailed dual-platform autonomous system design in seconds, with optional PDF output for documentation or reporting.
Accomplishments that I'm proud of
Successfully built a solo, end-to-end application that generates complete USV + ROV system designs with Gemini AI.
Designed a structured input interface with separate fields for platform, use-case, budget, and additional requirements.
Implemented real-time progress feedback and elapsed time display, improving user experience.
Enabled PDF export of the AI-generated designs, making it usable for reporting or documentation.
Deployed the application publicly on Hugging Face Spaces, making it accessible globally without installation.
What I learned
During development, I learned how to:
Integrate the Google Gemini 3 API for real-world engineering applications
Build interactive web apps with Gradio and deploy them on Hugging Face Spaces
Generate PDF reports dynamically using Python (FPDF)
Manage structured user input to produce well-formatted AI outputs
Handle real-time feedback with progress indicators and elapsed time calculation
This project also improved my understanding of autonomous system design principles, including sensors, propulsion, communication systems, and budgeting for practical engineering solutions.## What's next for Gemini based Autonomous System Designer Expand input options to allow multi-mission scenarios (e.g., coastal mapping + environmental monitoring).
Integrate ROV/USV simulation visuals to show paths and sensor coverage in real time.
Include advanced optimization features, such as cost-vs.-performance trade-offs.
Allow team collaboration and cloud storage of generated designs.
Explore real-time AI-assisted decision-making, where the AI recommends modifications based on changing requirements.
Built With
- fpdf
- google-genai
- gradio
- huggingface
- python

Log in or sign up for Devpost to join the conversation.