-
-
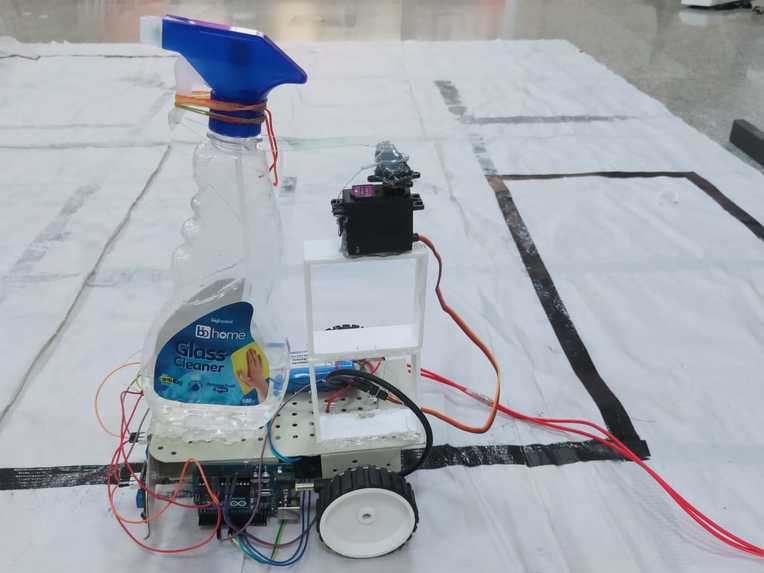
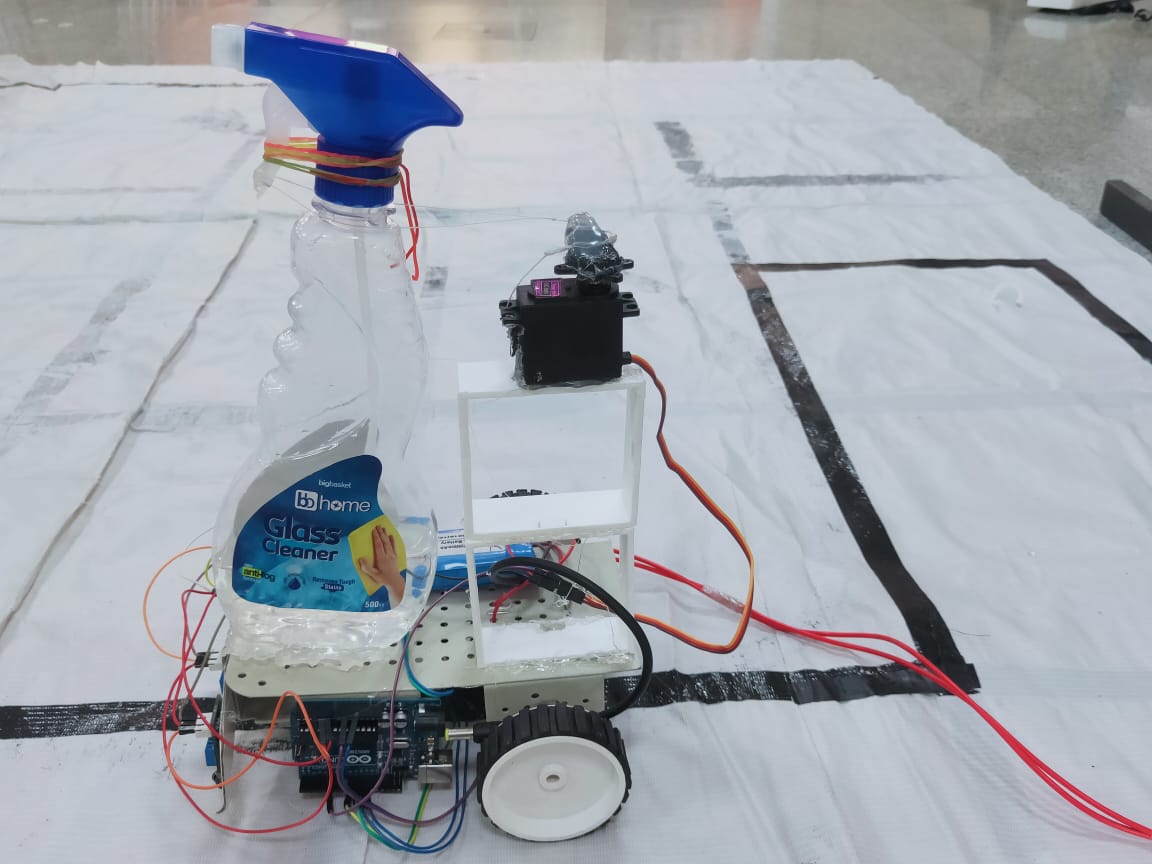
The gardening Bot
-

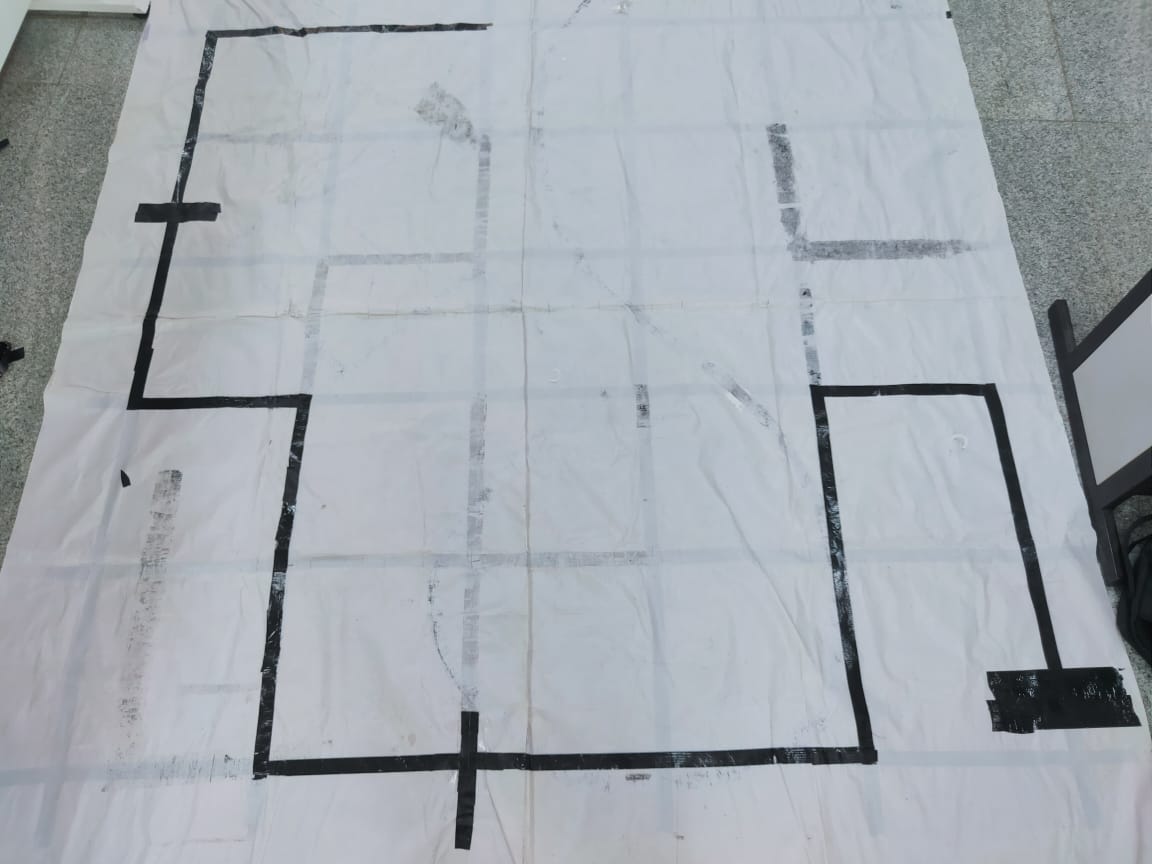
The path we used to test it
Inspiration
We were recently introduced to line followers by our college's robotic club, so we thought a line-follower bot could do the gardening and take care of the plants when given a specific path to follow.
What it does
when we instruct it or when it is a particular time of the day (say like 5:30 PM), it goes and sprays water and fertilizers on the plants.
How we built it
We first built the basic line follower using arduino, then we mounted a sprayer and attached a servo to it. We also added a NodeMCU to it, so that it can know what time it is through NTP servers (using nodemcu's wifi capability)
Challenges we ran into
The IR sensors needed a lot of tweaking in order to work, we had to tune the IR sensors capability by turning the potentiometer knob many times.
We had to fine tune the speed of the motors because, if it was too high, it would cross the 90 degree turns and head out of track. If it was too low, it would take a lot of time in making a lap through the garden.
The servo was not able to generate enough force to pull the sprayer's handle, so we had to use rubber bands to assist the servo.
Accomplishments that we're proud of
We made our first line follower finally! and we're glad to use it to automate the task of watering plants
What we learned
How to use IR sensors with arduino, how to use L293D motor drivers and dc motors with arduino, how to use NodeMCU and access NTP servers to know time.
What's next for Gardening Bot
We would like to add a camera to it, using the camera, the bot can also tell us the health of the plants by looking at their leaves (using opencv). We can also remote control it by sending commands through our phone to the nodeMCU already mounted on the bot.
Built With
- arduino
- esp8266

Log in or sign up for Devpost to join the conversation.